STM32F1 PWM控制必学技巧:HAL库中的速度与亮度精确调整
发布时间: 2024-12-17 10:32:58 阅读量: 5 订阅数: 3 

参考资源链接:[STM32F1 HAL库详解与应用指南](https://wenku.csdn.net/doc/6412b754be7fbd1778d49e9c?spm=1055.2635.3001.10343)
# 1. STM32F1 PWM控制基础
STM32F1系列微控制器因其丰富的外设和出色的性能,在工业控制领域得到广泛应用。PWM(脉冲宽度调制)是一种利用数字信号控制模拟信号的技术,特别适合实现电机速度控制和LED亮度调整等功能。本章节将介绍STM32F1 PWM控制的基础概念和编程要点。
## 1.1 PWM信号定义与应用领域
PWM信号是一种通过改变脉冲宽度来控制模拟信号输出的技术。其特点在于,通过调整脉冲的宽度(即占空比),可以控制设备(如电机或LED)的能量输入,从而实现对设备速度或亮度的连续控制。在工业自动化、机器人技术、电子制造等领域具有广泛的应用。
## 1.2 STM32F1中PWM信号的产生
STM32F1微控制器通过其定时器的PWM模式产生PWM信号。基本原理是定时器周期性地改变输出引脚的电平状态,根据预设的占空比来调节输出高低电平的时间比例。开发者需要配置定时器的预分频器、自动重载寄存器以及捕获/比较寄存器,以生成所需的PWM频率和占空比。
```c
// 示例代码:STM32F1系列PWM初始化配置(HAL库示例)
/* 初始化TIMx时钟 */
__HAL_RCC_TIMx_CLK_ENABLE();
/* 定时器基本配置 */
htim.Instance = TIMx; // 定时器实例
htim.Init.Prescaler = (uint32_t)(SystemCoreClock / 1000000) - 1; // 预分频器,计数频率为1MHz
htim.Init.CounterMode = TIM_COUNTERMODE_UP; // 向上计数模式
htim.Init.Period = 1000 - 1; // 自动重载寄存器值,决定PWM频率
htim.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1; // 时钟分频因子
htim.Init.RepetitionCounter = 0;
HAL_TIM_PWM_Init(&htim); // 初始化PWM
/* 配置PWM模式 */
sConfigOC.OCMode = TIM_OCMODE_PWM1; // PWM模式1
sConfigOC.Pulse = 500; // 设置占空比,此处为50%
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH; // 输出极性,高电平有效
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE; // 输出快速模式
HAL_TIM_PWM_ConfigChannel(&htim, &sConfigOC, TIM_CHANNEL_1); // 配置TIM通道1的PWM参数
/* 启动PWM信号输出 */
HAL_TIM_PWM_Start(&htim, TIM_CHANNEL_1); // 开始PWM通道1输出
```
在上述代码中,我们通过调用HAL库函数,设置STM32F1的定时器以产生PWM信号。通过调整`Prescaler`和`Period`参数,可以改变PWM的频率,而通过改变`Pulse`值则可以调整PWM的占空比。STM32F1微控制器的定时器非常灵活,可以为复杂的PWM应用提供强大的支持。
# 2. PWM信号生成与调整
### 2.1 PWM基本概念与生成机制
#### 2.1.1 PWM信号定义与重要性
脉冲宽度调制(PWM)信号是一种广泛应用于电子系统中的技术,特别是用于控制电机速度、LED亮度以及电源转换效率等场景。PWM信号的基本原理是通过调整一系列脉冲的宽度(即占空比)来控制目标设备的平均功率。
PWM的重要性在于它能够在不改变电压或电流幅度的情况下,通过改变脉冲宽度来调节功率输出,这使得它非常适合于需要精确控制能量供给的场合。相比于传统的模拟控制,PWM控制更加精确,同时也有助于减少系统的功耗,因为目标设备只在脉冲宽度的时段内接收能量。
```markdown
以LED为例,通过调整PWM信号的占空比,可以实现从0%(完全熄灭)到100%(完全点亮)之间的任何亮度等级,这使得PWM成为实现平滑亮度调节的首选方法。
```
#### 2.1.2 STM32F1中PWM信号的生成
STM32F1系列微控制器(MCU)是ST公司推出的基于ARM Cortex-M3内核的设备,这些MCU支持硬件PWM信号生成,这对于需要多个PWM通道的应用场景来说是非常方便的。
在STM32F1系列MCU中,PWM信号的生成主要依赖于定时器(Timer)模块。定时器可以配置为PWM模式,允许通过软件来设置脉冲的频率和占空比。每个定时器可以有多个通道,每个通道可以独立地生成PWM信号。这样的设计使得开发者可以轻松实现对多个设备的同步控制。
```markdown
例如,一个定时器配置为向上计数模式,当计数器的值与捕获比较寄存器的值匹配时,输出电平会切换。通过改变捕获比较寄存器的值,即可改变输出脉冲的宽度,从而实现PWM信号的生成。
```
### 2.2 PWM频率与占空比的基础调整
#### 2.2.1 PWM频率的确定与影响
PWM信号的频率对被控制设备的行为有着直接的影响。频率决定了脉冲的周期性以及单个脉冲的宽度,进而影响到控制效果。
如果PWM频率过低,接收设备(如电机或LED)可能会表现出明显的闪烁或不均匀的动作。相反,如果频率过高,虽然可以减少闪烁现象,但也会增加MCU的处理负担,甚至可能导致电路中其他部件的电磁干扰问题。
```markdown
对于电机控制,通常推荐的PWM频率是20kHz到30kHz。这个范围的频率对于大多数电机来说,既能消除可感知的噪声,又不会给MCU带来过大的负担。
```
#### 2.2.2 占空比的概念及调整方法
占空比是指在一个PWM周期内,信号处于高电平状态的时间与整个周期时间的比例。占空比是PWM控制中最核心的参数,它决定了设备在周期内的平均供电量。
占空比的调整通常通过改变定时器的捕获比较寄存器(CCRx)值来实现。当定时器的计数值与CCRx的值相匹配时,输出电平发生翻转。通过改变CCRx的值,可以控制PWM脉冲的宽度。
```markdown
例如,若一个PWM周期为10ms(即频率为100Hz),且CCRx设置为5ms,那么占空比为50%。若CCRx调整为2ms,则占空比变为20%,此时电机或LED接收到的能量减少,相应的速度或亮度降低。
```
### 2.3 HAL库对PWM信号的高级配置
#### 2.3.1 利用HAL库预设的函数进行PWM配置
STM32的HAL库提供了丰富的函数,以便开发者可以轻松配置和管理PWM信号。使用HAL库的API可以简化代码,减少编程错误,加快开发流程。
开发者可以通过调用如`HAL_TIM_PWM_Start()`函数来启动PWM信号,并通过`HAL_TIM_PWM_Stop()`来停止。此外,利用`HAL_TIM_PWM_ConfigChannel()`函数可以设置定时器的PWM通道参数,如频率和占空比。
```c
// 示例代码:初始化并启动PWM
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_1, value); // 设置PWM占空比
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_1); // 启动定时器TIM2的通道1的PWM信号输出
```
#### 2.3.2 时基的配置与精确控制
时基配置是决定PWM信号基本特性的关键步骤。在STM32F1系列中,时基配置通常涉及定时器的预分频器(Prescaler)和自动重载寄存器(ARR)的设置。
预分频器用于降低定时器的输入时钟频率,而自动重载寄存器定义了定时器计数的上限值。二者共同决定了定时器的更新事件频率,进而影响PWM信号的频率。
```markdown
例如,如果系统时钟为72MHz,预分频器设置为7200-1,自动重载寄存器设置为999-1,则定时器的更新频率为1kHz。在PWM模式下,这将直接决定PWM的频率。
```
在高级配置中,开发者还可以利用HAL库的高级API来调整时基配置,如`HAL_TIM_Base_Start()`和`HAL_TIM_Base_Stop()`,来精确控制定时器的工作模式和时钟频率。
# 3. PWM精度提升与错误调试
提升PWM信号的精度是电子工程领域中一项至关重要的任务,它直接关系到最终产品的性能。在本章节中,我们将深入探讨如何提升PWM信号的精度,以及在PWM应用过程中遇到的常见错误及其调试方法。我们将从硬件和软件两个层面分析提升精度的策略,并通过实例说明在实际应用中如何进行调试。
## 3.1 提升PWM信号精度的方法
### 3.1.1 硬件定时器与分辨率优化
硬件定时器是PWM信号生成的核心,其性能直接影响PWM的精度。分辨率是PWM信号能够表达的最小变化单位。在微控制器中,定时器的分辨率通常由其位数决定,例如8位、16位或32位定时器。分辨率越高,PWM信号能够表达的细节就越精细,但这并不意味着更高的分辨率总是更优。
```c
// 例子代码:配置16位定时器生成PWM信号
TIM_HandleTypeDef htimX; // X代表定时器编号
void MX_TIMX_Init(void)
{
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
htimX.Instance = TIMX; // X代表定时器实例名称,如TIM1、TIM2等
htimX.Init.Prescaler = (uint32_t)((SystemCoreClock / 2) / 1000000) - 1; // 预分频器设置,设定计数器时钟为1MHz
htimX.Init.CounterMode = TIM_COUNTERMODE_UP;
htimX.Init.Period = 0xFFFF; // 16位定时器的最大值,设置PWM周
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏以 STM32F1 HAL 库为主题,深入剖析其架构、编程技巧和高级应用。专栏内容涵盖模块化设计、GPIO 编程、时钟配置、串口通信、PWM 控制、定时器应用、SPI 通信、外部中断、电源管理、CAN 总线、调试技巧、系统安全和文件系统整合。通过详尽的解析和实战案例,专栏旨在帮助读者掌握 HAL 库的精髓,高效编写嵌入式代码,充分利用 STM32F1 微控制器的强大功能。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
星三角降压启动的秘密揭露:10个案例,10大技巧,全面提升电气性能
参考资源链接:[星三角降压启动plc梯形图电路图](https://wenku.csdn.net/doc/6412b783be7fbd1778d4a91d?spm=1055.2635.3001.10343)
# 1. 星三角降压启动概述
星三角降压启动是工业电动机启动方式中常见的一种方法,通
【SAP PPDS数据模型深度剖析】:全面解读数据结构与流程框架

参考资源链接:[SAP PPDS 的实施挑战](https://wenku.csdn.net/doc/v22sg2vs83?spm=1055.2635.3001.10343)
# 1. SAP PPDS数据模型概述
在当今企业资源规划(ERP)系统中,生产计划和详
Python变量与数据类型:掌握这10个技巧,让你的代码更高效

参考资源链接:[《Python语言程序设计》课后习题解析与答案](https://wenku.csdn.net/doc/5guzi5pw84?spm=1055.2635.3001.10343)
# 1. Python变量与数据类型基础
Python 作为一种解释型、面
Gabi软件新手终极指南:掌握12大核心技能,成为专家

参考资源链接:[GaBi4入门教程:全面解析软件操作与数据库应用](https://wenku.csdn.net/doc/4u2agq0o4r?spm=1055.2635.3001.10343)
# 1. Gabi软件介绍和基础操作
在信息时代,数据分析工具是企业不可或缺的资产。Gabi软件作为其中的佼佼者,凭借其强大的数据处理能力和用户友好的操作界面在业内广受欢迎。本章将对Gabi软件进行初步介绍,并带领读者完
【MQL4机器人实战】:构建你的高效自动化交易系统
参考资源链接:[MQL4中文手册:详解语法、函数与最新修订](https://wenku.csdn.net/doc/6412b745be7fbd1778d49b24?spm=1055.2635.3001.10343)
# 1. MQL4机器人概述
## MQL4机器人简介
MQL4机器人是基于MetaQuotes La
Yamaha机器人传感器应用:3大技巧提升感知能力,专家不传之谜

参考资源链接:[Yamaha机器人编程手册:RCX控制器与4轴机械手命令详解](https://wenku.csdn.net/doc/3buyfmee8t?spm=1055.2635.3001.10343)
# 1. Yamaha机器人传感器应用概述
## 简介
Yamaha机器人传感器,作为机器人自动化与智能化的核心
【计算机系统结构基础】:掌握核心概念与术语,成为领域内的高手
参考资源链接:[计算机系统结构课后习题答案-完整版-李学干版-word可编辑.doc](https://wenku.csdn.net/doc/6401acedcce7214c316eda82?spm=1055.2635.3001.10343)
# 1. 计算机系统结构概述
## 1.1 基本概念
计算机系统结构是研究计算机硬件和软件的组织方式,以及它们之间的协作方式。它涉及到硬件组件的设计、互
通信协议转换器选择与使用:西门子 S7-1200 与 ABB ACS510 的数据校验与同步

参考资源链接:[S7-1200 PLC通过Modbus与ABB ACS510变频器通信实战](https://wenku.csdn.net/doc/6412b794be7fbd1778d
拼多多盈利质量透视:深度剖析财务报表与增长驱动力
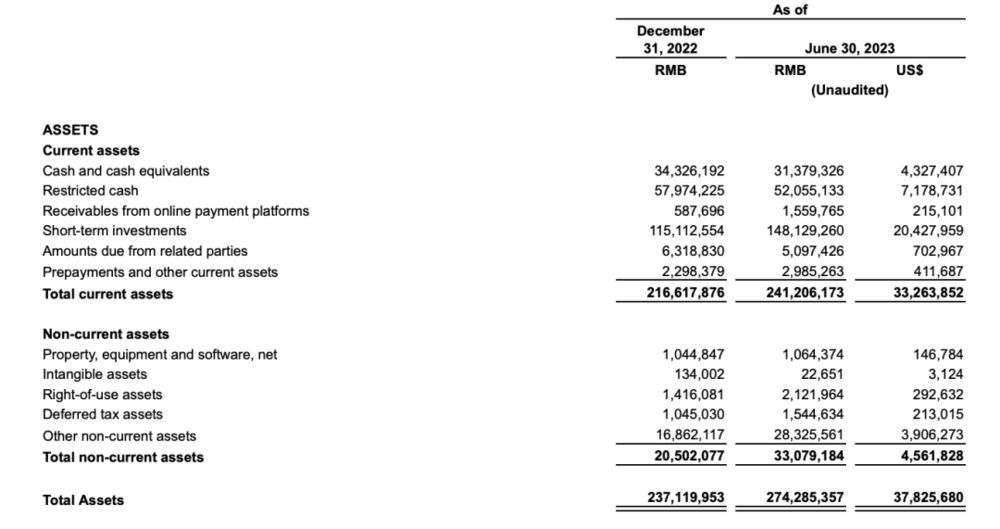
参考资源链接:[拼多多财务报表分析:揭示电商巨头的成功秘诀](https://wenku.csdn.net/doc/1hd4gcrewb?spm=1055.2635.3001.10343)
# 1. 拼多多财务报表基础分析
拼多多作为一家在电子商务领域迅速崛起的公司,其财务报表是评估其经营状况和市场表现的
快速掌握MATLAB xcorr函数

参考资源链接:[MATLAB中xcorr函数详解:计算随机过程互相关序列](https://wenku.csdn.net/doc/6i14uskrnb?spm=1055.2635.3001.
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )