教学与实践:R语言SolveLP包在教学中的应用案例
发布时间: 2024-11-06 17:32:42 阅读量: 19 订阅数: 26 

Python库 | pysolnp-2021.4.25-cp39-cp39-macosx_10_14_x86_64.whl

# 1. R语言与线性规划基础
## 线性规划概述
线性规划是一种数学优化方法,广泛应用于资源分配、生产计划和物流管理等领域。它的核心是在线性目标函数的最大化或最小化的同时,满足一系列线性不等式或等式约束。
## R语言简介
R是一种强大的统计语言,特别适合数据分析、图形表示和线性规划等计算密集型任务。R语言提供了丰富的包和函数,使得线性规划问题的建模和求解更加高效和灵活。
## R语言与线性规划的结合
在R语言中,可以通过多种包来实现线性规划,如lpSolve、ROI和SolveLP等。这些包提供了简洁的API来定义目标函数、约束条件,并利用优化算法进行问题求解。本章将着重介绍线性规划的基础知识,为后续章节中SolveLP包的学习和应用打下坚实的理论基础。
# 2. SolveLP包的理论基础和安装
## 2.1 线性规划的基本概念
### 2.1.1 线性规划问题的定义
线性规划问题(Linear Programming, LP)是运筹学中的一种重要方法,它在资源优化配置、生产计划、物流、金融等众多领域中有着广泛的应用。线性规划的核心目标是在一组线性约束条件下,通过求解线性目标函数的最大化或最小化问题,实现决策变量的有效配置。
线性规划问题通常可以描述为:
- 决策变量:设\( x_1, x_2, ..., x_n \)为决策变量。
- 目标函数:设 \( c_1x_1 + c_2x_2 + ... + c_nx_n \) 为需要最大化的线性目标函数,其中 \( c_1, c_2, ..., c_n \) 为已知系数。
- 约束条件:设 \( a_{ij} \) 和 \( b_i \) 为约束条件中的系数和常数项,\( m \) 为约束的个数,线性不等式或等式组 \( a_{i1}x_1 + a_{i2}x_2 + ... + a_{in}x_n \leq b_i \) 或 \( = b_i \)(\( i = 1, 2, ..., m \))定义了决策变量必须满足的约束。
- 非负性条件:通常情况下,决策变量需要满足非负性约束,即 \( x_j \geq 0 \),对于所有 \( j = 1, 2, ..., n \)。
### 2.1.2 线性规划的标准形式与变形
线性规划的标准形式是:
```
maximize z = c_1x_1 + c_2x_2 + ... + c_nx_n
subject to a_{i1}x_1 + a_{i2}x_2 + ... + a_{in}x_n ≤ b_i, i = 1, 2, ..., m
x_j ≥ 0, j = 1, 2, ..., n
```
在实际应用中,我们可能会遇到不同的问题形式,比如:
- 最小化问题:可以通过目标函数的系数取负值转化为最大化问题。
- 等式约束:可以通过引入松弛变量转化为不等式约束。
- 无约束或有特殊约束的问题:可以通过引入人工变量或特殊处理方法转化到标准形式。
## 2.2 SolveLP包简介
### 2.2.1 SolveLP包的安装与更新
SolveLP是一个R语言包,用于解决线性规划问题。在R语言环境中,可以通过以下命令来安装SolveLP包:
```R
install.packages("SolveLP")
```
如果需要更新包,可以使用以下命令:
```R
update.packages("SolveLP", ask = FALSE)
```
### 2.2.2 SolveLP包的主要功能与优势
SolveLP包的主要功能包括:
- 定义和求解线性规划问题。
- 提供目标函数的直接调整,以适应问题的最小化或最大化要求。
- 返回详细的解决方案,包括目标函数值、最优解、约束条件等。
- 支持灵敏度分析,以评估目标函数系数或约束条件变化对最优解的影响。
优势:
- SolveLP包具有简洁易用的接口,使线性规划问题的建模和求解变得直观。
- 提供了快速求解大规模线性规划问题的能力。
- 兼容性好,可以轻松与其他R包进行集成,扩展功能。
- 开源代码,用户可根据需要自定义和优化算法。
```mermaid
flowchart LR
A[开始] --> B[安装SolveLP包]
B --> C[检查是否有新版本]
C -->|有新版本| D[更新SolveLP包]
C -->|无新版本| E[继续使用当前版本]
D --> F[应用SolveLP包解决线性规划问题]
E --> F
F --> G[进行灵敏度分析]
G --> H[获得解决方案]
```
在下一节中,我们将详细讨论如何使用SolveLP包来建模和求解线性规划问题。
# 3. SolveLP包的基本使用方法
在上一章中,我们了解了线性规划的基础理论,并且对SolveLP包有了一个初步的认识。本章将深入探讨SolveLP包的具体使用方法,包括线性规划问题的建模、求解以及灵敏度分析的详细步骤和技巧。通过本章节的深入剖析,您可以将SolveLP包运用到实际问题的解决中,实现资源优化和决策支持。
## 3.1 线性规划问题的建模
在开始使用SolveLP包之前,首先需要明确线性规划问题的数学模型。这包括定义目标函数和设置约束条件。
### 3.1.1 目标函数的定义
目标函数是线性规划模型中需要优化的函数,通常表示为:
\[ \text{maximize} \quad c_1x_1 + c_2x_2 + \cdots + c_nx_n \]
或者
\[ \text{minimize} \quad c_1x_1 + c_2x_2 + \cdots + c_nx_n \]
在这里,\( c_1, c_2, \ldots, c_n \) 是常数系数,\( x_1, x_2, \ldots, x_n \) 是决策变量。在R语言中,这些系数和变量将被组织成向量的形式。
#### 代码块展示:
```R
# 定义目标函数系数
objective_coeffs <- c(3, 2) # 示例系数
# 创建目标函数,假设是最大化目标函数
lp_problem <- list(
objective.in = objective_coeffs,
direction = "max"
)
```
在上述代码块中,我们定义了一个目标函数,其中包含了两个决策变量和相应的系数,表示我们希望最大化目标函数的值。函数的方向被设置为“max”,表示最大化问题,对应的也可以设置为“min”来表示最小化问题。
### 3.1.2 约束条件的设置
约束条件限制了决策变量的取值范围,常见的线性规划约束条件包括等式约束和不等式约束,通常表示为:
\[ a_{11}x_1 + a_{12}x_2 + \cdots + a_{1n}x_n \leq b_1 \]
或者
\[ a_{21}x_1 + a_{22}x_2 + \cdots + a_{2n}x_n = b_2 \]
在R中,这些约束条件被组织成矩阵和向量的形式。
#### 代码块展示:
```R
# 定义约束条件矩阵和右侧向量
constraints_matrix <- matrix(c(1, 2, 3, 4), nrow = 2, byrow = TRUE)
constraints_vector <- c(100, 200)
# 添加约束条件到线性规划问题中
lp_problem <- list(
objective.in = objective_coeffs,
const.mat = constraints_matrix,
const.dir = c("<=", "="),
const.rhs = constraints_vector,
direction = "max"
)
```
在该代码块中,我们创建了一个约束条件矩阵和对应的右侧向量,然后将这些约束条件添加到线性规划问题对象`lp_problem`中。`const.dir`向量指定了每个约束条件是小于等于还是等于的关系。
## 3.

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏是关于 R 语言中 SolveLP 数据包的全面指南。它涵盖了从入门到高级的线性规划求解技巧。通过一系列文章,读者将学习如何使用 SolveLP 包高效求解线性规划问题。文章涵盖了 SolveLP 包的安装、配置、模型构建、求解、灵敏度分析、模型验证和性能测试。此外,本专栏还提供了实际案例和教学应用,帮助读者深入了解 SolveLP 包在金融建模、决策支持和教学中的应用。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
PyroSiM中文版模拟效率革命:8个实用技巧助你提升精确度与效率
# 摘要
PyroSiM是一款强大的模拟软件,广泛应用于多个领域以解决复杂问题。本文从PyroSiM中文版的基础入门讲起,逐渐深入至模拟理论、技巧、实践应用以及高级技巧与进阶应用。通过对模拟理论与效率提升、模拟模型精确度分析以及实践案例的探讨,本文旨在为用户提供一套完整的PyroSiM使用指南。文章还关注了提高模拟效率的实践操作,包括优化技巧和模拟工作流的集成。高级
QT框架下的网络编程:从基础到高级,技术提升必读
# 摘要
QT框架下的网络编程技术为开发者提供了强大的网络通信能力,使得在网络应用开发过程中,可以灵活地实现各种网络协议和数据交换功能。本文介绍了QT网络编程的基础知识,包括QTcpSocket和QUdpSocket类的基本使用,以及QNetworkAccessManager在不同场景下的网络访问管理。进一步地,本文探讨了QT网络编程中的信号与槽
优化信号处理流程:【高效傅里叶变换实现】的算法与代码实践

# 摘要
傅里叶变换是现代信号处理中的基础理论,其高效的实现——快速傅里叶变换(FFT)算法,极大地推动了数字信号处理技术的发展。本文首先介绍了傅里叶变换的基础理论和离散傅里叶变换(DFT)的基本概念及其计算复杂度。随后,详细阐述了FFT算法的发展历程,特别是Coo
MTK-ATA核心算法深度揭秘:全面解析ATA协议运作机制

# 摘要
本文深入探讨了MTK-ATA核心算法的理论基础、实践应用、高级特性以及问题诊断与解决方法。首先,本文介绍了ATA协议和MTK芯片架构之间的关系,并解析了ATA协议的核心概念,包括其命令集和数据传输机制。其次,文章阐述了MTK-ATA算法的工作原理、实现框架、调试与优化以及扩展与改进措施。此外,本文还分析了MTK-ATA算法在多
【MIPI摄像头与显示优化】:掌握CSI与DSI技术应用的关键
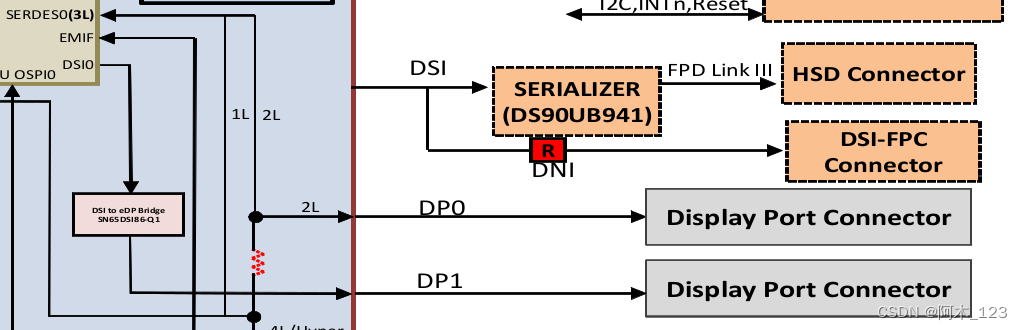
# 摘要
本文全面介绍了MIPI摄像头与显示技术,从基本概念到实际应用进行了详细阐述。首先,文章概览了MIPI摄像头与显示技术的基础知识,并对比分析了CSI与DSI标准的架构、技术要求及适用场景。接着,文章探讨了MIPI摄像头接口的配置、控制、图像处理与压缩技术,并提供了高级应用案例。对于MIPI显示接口部分,文章聚焦于配置、性能调优、视频输出与图形加速技术以及应用案例。第五章对性能测试工具与
揭秘PCtoLCD2002:如何利用其独特算法优化LCD显示性能

# 摘要
PCtoLCD2002作为一种高性能显示优化工具,在现代显示技术中占据重要地位。本文首先概述了PCtoLCD2002的基本概念及其显示性能的重要性,随后深入解析了其核心算法,包括理论基础、数据处理机制及性能分析。通过对算法的全面解析,探讨了算法如何在不同的显示设备上实现性能优化,并通过实验与案例研究展示了算法优化的实际效果。文章最后探讨了PCtoLCD2002算法的进阶应用和面临
DSP系统设计实战:TI 28X系列在嵌入式系统中的应用(系统优化全攻略)
# 摘要
TI 28X系列DSP系统作为一种高性能数字信号处理平台,广泛应用于音频、图像和通信等领域。本文旨在提供TI 28X系列DSP的系统概述、核心架构和性能分析,探讨软件开发基础、优化技术和实战应用案例。通过深入解析DSP系统的设计特点、性能指标、软件开发环境以及优化策略,本文旨在指导工程师有效地利用DSP系统的
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )