S32K144 PWM控制技术:电机驱动与调速终极指南
发布时间: 2024-12-14 11:38:37 阅读量: 1 订阅数: 3 

ftm_pwm_FTM_FTMPWM测试_s32k144ftmpwm_
参考资源链接:[S32K144 reference manual](https://wenku.csdn.net/doc/6412b6d4be7fbd1778d4820e?spm=1055.2635.3001.10343)
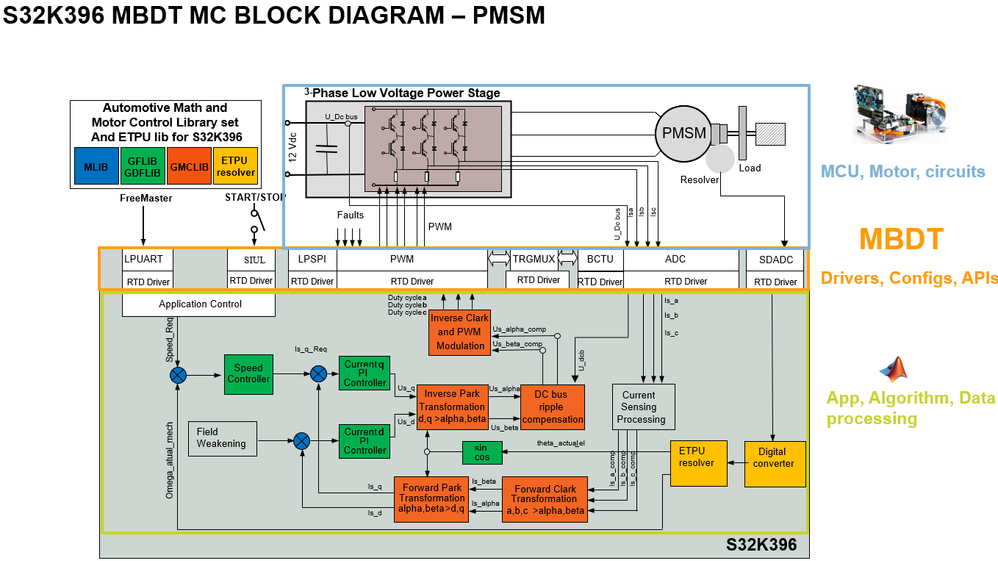
# 1. S32K144微控制器概述
S32K144微控制器是NXP半导体推出的一款高性能的32位汽车级MCU,它集成了丰富的外设,强大的计算能力,以及灵活的通信接口,为汽车、工业以及消费类应用提供了理想的解决方案。这一章节将对S32K144的硬件架构、性能特点进行简单介绍,并探究其在各类应用中的潜力。
S32K144搭载ARM Cortex-M4核心,主频高达80MHz,并配备有专用硬件乘除法器和浮点单元,支持单精度浮点运算,为处理复杂算法提供了硬件支持。它包含多通道PWM输出,适合电机控制、照明控制等应用场景。同时,S32K144还提供了丰富的定时器、ADC、通信接口等外设资源,能够支持广泛的传感器接口,是物联网(IoT)设备开发的理想选择。
此外,我们还将探讨S32K144在安全关键系统中的应用,包括汽车电子稳定程序(ESC)和发动机管理系统(EMS)。通过了解其架构和功能,读者将对如何利用S32K144微控制器解决实际问题有一个初步认识,并为下一章关于PWM的基础知识和理论学习打下坚实的基础。
# 2. PWM基础知识和理论
## 2.1 PWM技术原理
### 2.1.1 PWM波形的生成
脉冲宽度调制(PWM)是一种在一定频率下产生一系列脉冲的技术,脉冲的宽度可以根据需要调整。在数字系统中,PWM波形通过计时器模块或专用硬件生成,这些模块在计数到预设值时切换输出信号的状态。
PWM的生成流程可以理解为:首先,一个定时器开始计数,计数达到设定的周期值时,PWM输出信号翻转;计数达到预设的占空比值时,信号再次翻转,从而完成一个周期的输出。通过改变占空比值,可以控制输出信号中高电平和低电平的持续时间。
### 2.1.2 PWM信号的关键参数
PWM信号的关键参数包括周期、占空比、频率和相位。周期是指PWM波形重复一次的时间长度,占空比是指在一个周期中高电平所占的时间比例,频率是周期的倒数,相位则描述了波形相对于时间原点的位置。
周期和占空比是直接影响PWM输出特性的两个参数,频率决定了PWM信号变化的速度,而相位则可以用于同步多个PWM信号,这在多电机控制等场合特别重要。
## 2.2 PWM在电机控制中的作用
### 2.2.1 电机速度控制的原理
在电机控制中,PWM信号通过调整电机绕组的平均电压来控制电机的转速。由于电机绕组的电感特性,PWM信号中的高电平时间(占空比)决定了通过绕组的平均电流,进而影响电机的力矩和转速。
### 2.2.2 PWM调速的优势和限制
PWM调速的优点包括高效利用能源、减少热量生成、简化控制电路设计等。通过调整PWM占空比,可以实现无级平滑调速,同时保持电机运转时较低的噪声和振动。
然而,PWM调速也有其限制,比如对电机绕组和驱动电路的耐压、耐流要求较高;在某些应用中,高频PWM可能导致电机运行不平稳或产生EMI(电磁干扰)问题。
## 2.3 S32K144 PWM模块的特点
### 2.3.1 S32K144 PWM模块的架构
S32K144微控制器的PWM模块包含了灵活的定时器、输出比较和输入捕获功能。模块支持不同的时钟源和时钟预分频器,可以配置为多种工作模式,如PWM模式、输出比较模式和输入捕获模式等。
### 2.3.2 S32K144 PWM模块的配置选项
配置S32K144的PWM模块,需要设定定时器的周期值、占空比值、极性以及输出模式等参数。该模块还提供了故障保护、通道互锁、死区控制等功能,为复杂的电机控制应用提供了强大的支持。
S32K144 PWM模块的配置选项能够实现诸如调整PWM信号的精确时序和占空比,实现复杂的电机驱动功能。配合其他模块如ADC,还可以实现反馈控制和闭环控制等高级功能。
```c
// 示例代码:S32K144 PWM模块配置示例
// 注意:示例代码仅供参考,实际应用中需要根据具体硬件和需求进行调整。
#include "S32K144.h"
void PWM_Init() {
// 初始化代码,配置PWM通道、定时器周期值和占空比等
}
```
```mermaid
flowchart LR
A[开始PWM配置] --> B[设置PWM频率]
B --> C[配置PWM占空比]
C --> D[启用PWM通道]
D --> E[测试PWM输出]
```
```table
| 参数 | 描述 |
| ------------ | --------------------------- |
| PWM频率 | 控制电机转速和响应速度 |
| 占空比 | 影响电机力矩和电流 |
| 定时器周期值 | 决定PWM波形的更新频率 |
| 输出模式 | 定义PWM波形的电平特性 |
| 故障保护 | 提高系统安全性和可靠性 |
```
在实际应用中,根据具体场景需求进行配置和调整是非常重要的。例如,在不同负载下的电机控制,可能需要动态调整PWM参数来适应不同的工作条件。
在下一章节中,我们将深入探讨如何在S32K144微控制器上实际配置PWM模块,并通过实例代码展示如何控制电机转速。
# 3. S32K144 PWM控制实践
在现代电子系统中,脉冲宽度调制(PWM)技术已经变得不可或缺,特别是在需要精确控制电机速度和方向的场合。S32K144微控制器具有高度灵活的PWM模块,能够实现复杂的控制算法。本章深入探讨PWM的初始化、配置以及在电机驱动中的应用,并提供一些故障处理和调试技巧。
## 3.1 PWM初始化与配置
在进行任何PWM操作之前,确保正确的初始化和配置是至关重要的。这一过程包括了设置时钟、初始化GPIO引脚、以及配置PWM模块的参数。
### 3.1.1 PWM模块的启动与初始化
首先,需要配置S32K144的系统时钟,以确保PWM模块能够按照预定的频率运行。S32K144的时钟系统由多个时钟源组成,包括内部时钟源、外部时钟源等。初始化时,我们需要选择合适的时钟源,并配置好分频器以生成PWM模块所需的时钟频率。
```c
// 示例代码:S32K144时钟配置
#include "S32K144.h"
void ClockSetup(void) {
// 此处假设使用外部晶振,需要根据实际情况进行配置
SOSC->CR |= SOSC_CR_EREFSTEN_MASK; // 启用外部参考时钟
SPLL->CR |= SPLL_CR_PLLCLKEN_
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
S32K144 参考手册是一个全面的指南,涵盖了 S32K144 系列微控制器的各个方面。它为新手提供了 10 个技巧,帮助他们快速掌握 S32K144,还深入探讨了串行通信、ADC/DAC 转换、低功耗设计、系统调试、项目开发、RTOS 集成、CAN 总线通信、安全特性、物联网应用、PWM 控制、数据加密、电源管理和 I/O 端口扩展等主题。该手册旨在为工程师提供全面的资源,帮助他们充分利用 S32K144 的功能,构建高效、可靠和安全的嵌入式系统。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【LabVIEW视觉速成课】:快速构建你的首个视觉系统
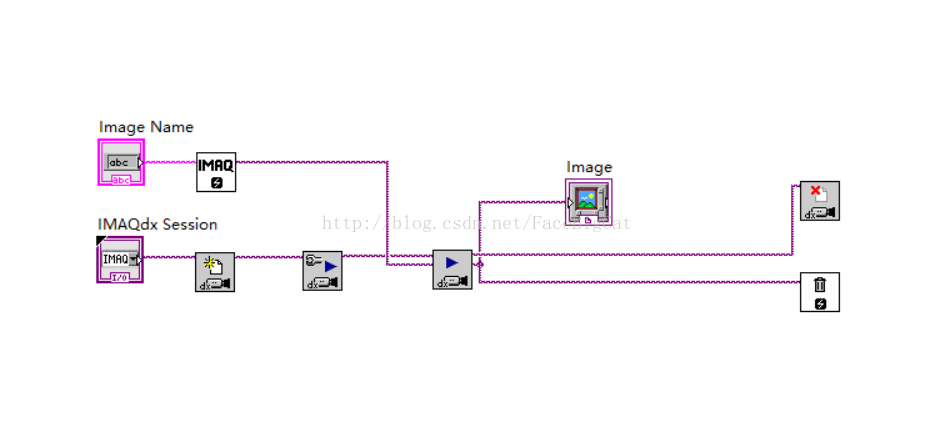
参考资源链接:[LabVIEW调用DLL指南:结构体与指针处理](https://wenku.csdn.net/doc/6g5m5mt2bn?spm=1055.2635.3001
易语言高效编程:超级列表框双击事件处理的15大黄金法则
参考资源链接:[易语言教程:超级列表框双击事件处理示例](https://wenku.csdn.net/doc/645dfc635928463033a3c835?spm=1055.2635.3001.10343)
# 1. 易语言双击事件基础
## 双击事件概述
在图形用户界面(GUI)编程中,双击事件是指用户两次快速连续点击鼠标左键的操作。易语言作为一款面向中文用户的编程语言,提供了丰富的事件处理机制,其中双击事件是最常见的交互方式之一。对于易语言开发者而言,理解和掌握双击事件的处理是构建互动应用程序的基础。
## 双击事件的基本概念
双击事件通常用于打开文件、执行命令或切换应用程序的状
【HP45喷墨打印头终极指南】:掌握打印头技术规格、维护、故障排除及性能优化

参考资源链接:[HP45喷墨打印头技术详解与DIY指南](https://wenku.csdn.net/doc/1fn71n61ee?spm=1055.2635.3001.10343)
# 1. HP45喷墨打印头概述
在当今数字化工作流程中,喷墨打印技术始终扮演着至关重要的角色。HP45喷墨打印头作为行业内的经典代表之一,拥有其独特的历史地位和广泛
WinCC与PLC通信设置:从新手到专家只需三步
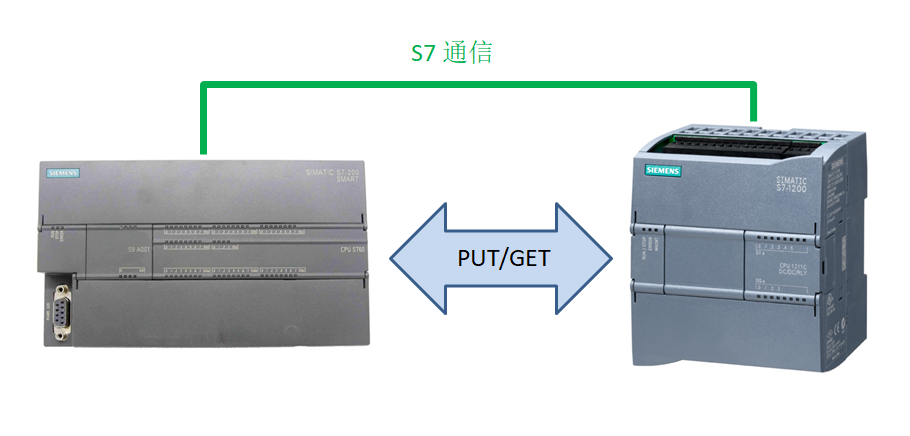
参考资源链接:[WinCC_flexible_SMART_V3SP1、SP2和WinccV7.3、WinccV7.4下载地址](https://wenku.csdn.net/doc/6412b5e8be7fbd1778d44d3e?spm=1055.2635.3001.10343)
# 1. WinCC与PLC通信概述
工业自动化领域中,WinCC和PLC的结合为数据采集、监控和控
无线通信技术详解:如何用Tse教材习题提升实战技能
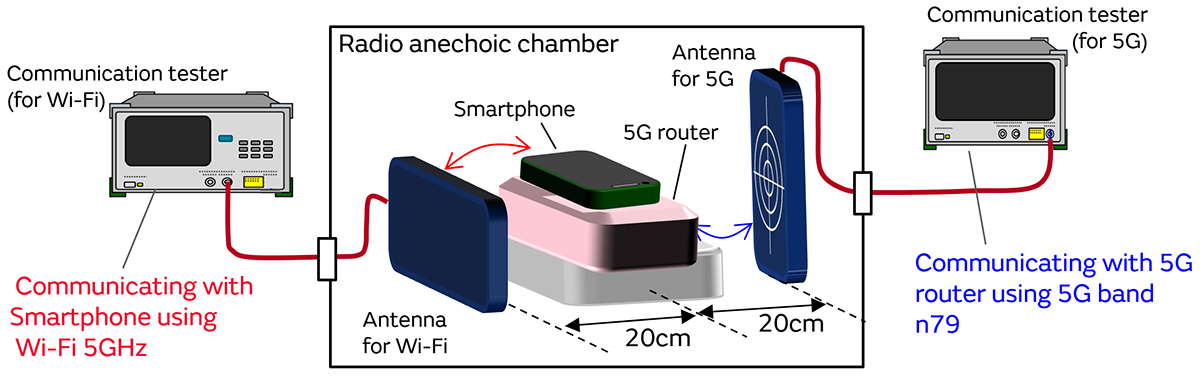
参考资源链接:[Fundamentals of Wireless Communication-David Tse -课后习题答案](https://wenku.csdn.net/doc/6412b4cdbe7fbd1778d40e14?spm=1055.2635.3001.10343
【通信协议精通】:IPMB通信协议高级特性与优化指南
参考资源链接:[IPMB与I2C在服务器平台管理中的应用解析](https://wenku.csdn.net/doc/6412b511be7fbd1778d41d41?spm=1055.2635.3001.10343)
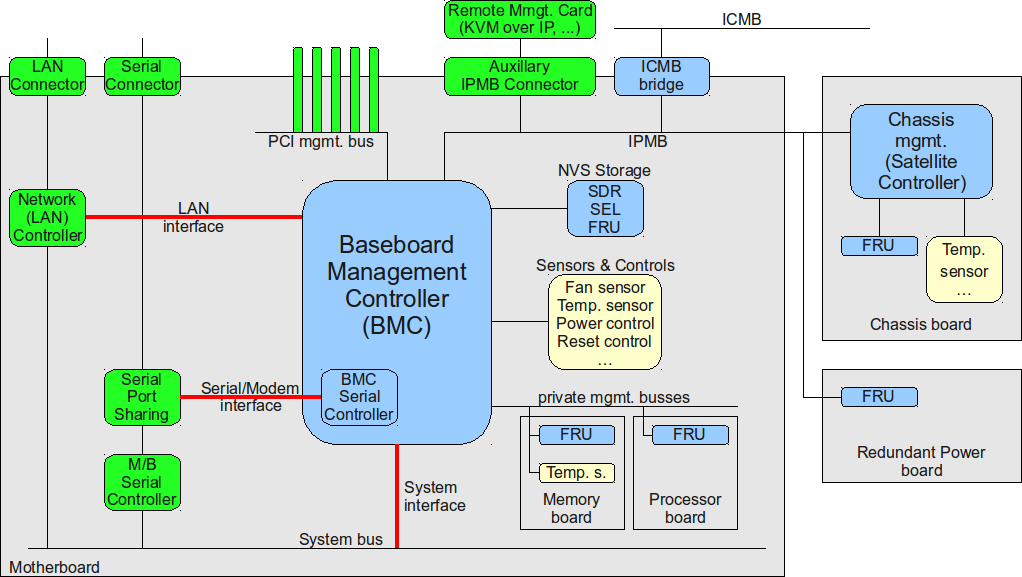
# 1. IPMB通信协议概述
IPMB(Intelligent Platform Management Bus)通信协议是用于计算机、服务器和
【Python代码实践】:跨平台Failed building wheel解决方案大公开

参考资源链接:[解决Python pip安装时'Failed building wheel for xxx'错误](https://wenku.csdn.net/doc/6412b720be7fbd1778d492f4?spm=1055.2635
【谐波齿轮减速器设计挑战】:5大策略应对极端环境
参考资源链接:[谐波齿轮减速器设计与三维建模研究](https://wenku.csdn.net/doc/647be332d12cbe7ec3377731?spm=1055.2635.3001.10343)
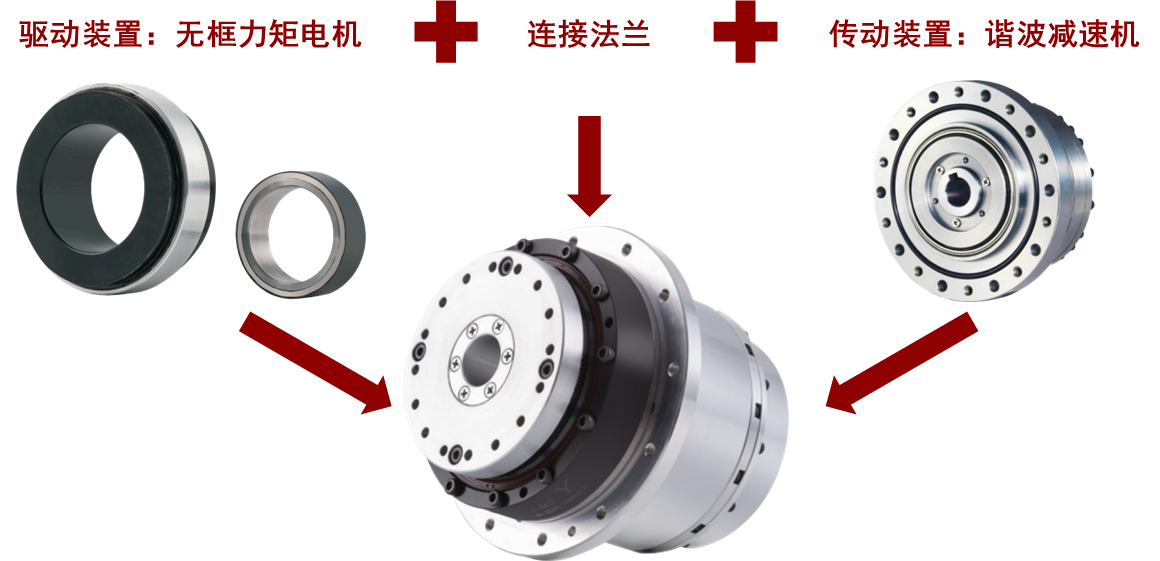
# 1. 谐波齿轮减速器设计基础
谐波齿轮减速器凭借其紧凑的结构和优异的传动性能,在各种精密传动系统中得到了广泛应用。本章将介绍谐波齿轮减速器的基础设计知识,为深入探讨其在极端环境下应
【PADS Layout定制化之路】:个性化BOM的5个自定义字段技巧

参考资源链接:[PADS LAYOUT导出BOM清单教程](https://wenku.csdn.net/doc/2qwcirrnpg?spm=1055.2635.3001.10343)
# 1. PADS Layout与BOM定制化基础
在现代电子制造和设计领域,PADS Layout软件已成为工程师们不可或缺的工具之一。它提供了强大的电路
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )