图像处理算法精讲:以冈萨雷斯《数字图像处理》为蓝本(揭秘算法背后的秘密)
发布时间: 2024-12-14 22:28:29 阅读量: 13 订阅数: 19 

zip4j.jar包下载,版本为 2.11.5
参考资源链接:[冈萨雷斯《数字图像处理》第4版英文PDF,完整文字版](https://wenku.csdn.net/doc/64620b4b5928463033b52987?spm=1055.2635.3001.10343)
# 1. 数字图像处理概述
## 1.1 数字图像处理的定义与重要性
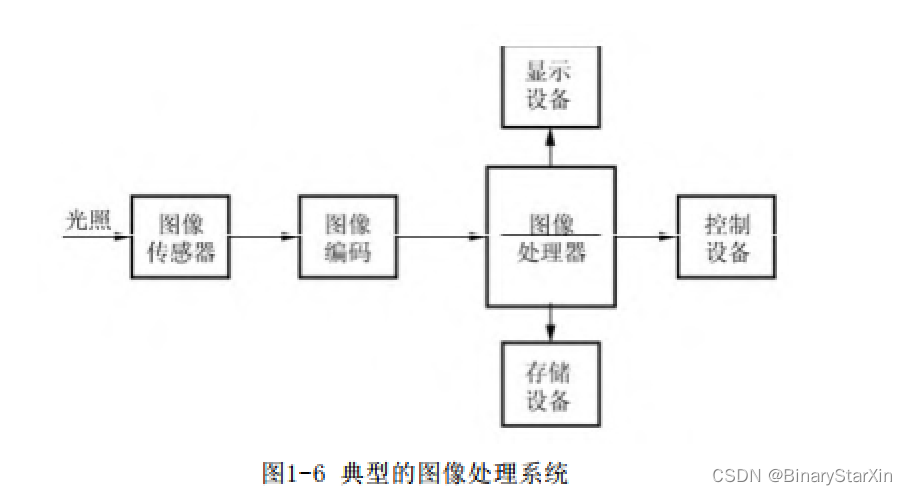
数字图像处理是指通过计算机对图像进行数字化和分析的一系列技术。它涉及到图像的获取、存储、处理、分析以及输出等过程。数字图像处理技术的应用领域极其广泛,包括医学成像、卫星遥感、工业检测、视频监控和数字娱乐等。随着技术的不断进步,数字图像处理的重要性与日俱增,它不仅能够帮助人们获得更清晰的视觉体验,还能够通过图像内容的分析辅助决策。
## 1.2 基本概念与技术分类
在数字图像处理领域,几个基本概念包括图像、像素、灰度级、分辨率和颜色空间。技术分类主要可以分为两大类:图像增强和图像分析。图像增强技术主要用于提高图像质量,如对比度调整、锐化、平滑和色彩校正等。而图像分析则更注重从图像中提取信息,如边缘检测、特征识别、图像分割和目标追踪等。这些技术的应用,为自动化和智能化的图像处理提供了可能。
## 1.3 发展趋势与未来展望
随着计算能力的提升和算法的不断进步,数字图像处理的发展趋势正朝着更高效、更智能的方向前进。深度学习和人工智能的应用使得图像识别和处理技术更加精确和自动化。未来,我们有望看到图像处理技术在自动驾驶、智慧医疗、工业自动化等领域发挥更加关键的作用。同时,隐私保护和数据安全将成为行业发展的重要考量因素。
# 2. 图像处理的数学基础
### 2.1 线性代数在图像处理中的应用
#### 2.1.1 矩阵操作与图像变换
图像可以看作是矩阵的一种,而矩阵操作是图像处理中的一项基础而重要的操作。矩阵操作在图像处理中的应用,包括旋转、缩放、平移等几何变换,以及图像的增强和过滤。
例如,一个灰度图像可以用一个二维矩阵表示,矩阵中的每个元素代表图像的一个像素点。当对图像进行旋转变换时,可以使用矩阵乘法来实现。旋转矩阵R可以表示如下:
```math
R = \begin{bmatrix}
\cos\theta & -\sin\theta \\
\sin\theta & \cos\theta \\
\end{bmatrix}
```
在代码中实现矩阵乘法时,需注意矩阵的维度匹配。例如在Python中,可以使用NumPy库进行矩阵运算:
```python
import numpy as np
# 定义旋转矩阵
theta = np.radians(45) # 将角度转换为弧度
rotation_matrix = np.array([[np.cos(theta), -np.sin(theta)],
[np.sin(theta), np.cos(theta)]])
# 假设image_matrix是图像对应的二维矩阵
# 进行矩阵乘法来实现旋转
rotated_image = np.dot(rotation_matrix, image_matrix)
```
在上述代码中,我们首先定义了一个旋转角度,然后根据角度计算了旋转矩阵。接着,我们使用NumPy的`dot`函数实现了矩阵乘法,完成了图像的旋转操作。
矩阵操作不仅是图像变换的核心,也和许多图像处理算法紧密相关。理解并能应用矩阵运算,是深入图像处理领域的关键。
### 2.1.2 傅里叶变换与图像频域分析
傅里叶变换是将图像从空间域转换到频域的数学工具,它是图像处理中分析图像频率分量的基础技术。在频域中,图像可以通过不同频率的波形组合来表示,这为图像滤波、边缘检测等提供了便利。
**基本概念**
傅里叶变换把图像中的空间信息转换为频率信息。低频信息通常对应于图像中的慢变化部分,如大面积的平坦区域;而高频信息则对应于图像中的快速变化部分,如边缘和细节。
**应用过程**
1. **图像预处理**:首先将图像转换为灰度图像(如果它不是灰度图像),然后应用二维傅里叶变换。
2. **频域滤波器设计**:设计一个滤波器来通过或抑制某些频率分量。
3. **逆变换**:将经过滤波的频域图像通过逆傅里叶变换转换回空间域。
以Python为例,我们可以使用`numpy`和`scipy`库来实现傅里叶变换:
```python
import numpy as np
from scipy.fftpack import fft2, ifft2
# 假设image_matrix是已经转换成灰度的二维矩阵
f_transform = fft2(image_matrix)
# 设计一个低通滤波器
rows, cols = image_matrix.shape
crow, ccol = rows // 2, cols // 2
mask = np.zeros((rows, cols), np.uint8)
mask[crow-30:crow+30, ccol-30:ccol+30] = 1
# 应用滤波器
f_shift = fftshift(f_transform) * mask
# 逆变换
f_ishift = ifftshift(f_shift)
img_back = ifft2(f_ishift)
img_back = np.abs(img_back)
```
在这段代码中,`fft2`函数完成了二维傅里叶变换,`fftshift`函数将零频率分量移动到频谱中心,`ifft2`则实现了逆变换。通过在频域中应用低通滤波器,我们可以模糊图像或者去除噪声。
傅里叶变换不仅在理论上具有重要意义,而且在实际应用中也有广泛的作用,特别是在图像压缩、特征提取和边缘检测等领域。
### 2.2 概率论与图像统计模型
#### 2.2.1 概率论基础与图像噪声建模
在图像处理过程中,噪声经常是不可避免的。对于图像噪声建模,概率论为我们提供了一个强大的工具集。
**噪声类型**
常见的图像噪声有高斯噪声、泊松噪声、椒盐噪声等。每种噪声类型在图像中有不同的统计特性。
**噪声建模**
以高斯噪声为例,高斯噪声的概率分布可以用正态分布来描述。图像中的像素值受高斯噪声影响,可以用以下模型表示:
```math
N(x, y) = I(x, y) + \eta
```
其中,`I(x, y)`是原始像素值,`η`是来自均值为0,方差为σ^2的正态分布的噪声。
**噪声消除**
高斯噪声可以用均值滤波或高斯滤波来消除。均值滤波器采用邻域像素的平均值作为新像素值,而高斯滤波器则使用加权平均,权重基于高斯函数。
例如,使用均值滤波器来消除高斯噪声的Python代码如下:
```python
import numpy as np
def gaussian_filter(image, kernel_size=3, sigma=1.0):
# 创建高斯核
x, y = np.mgrid[-kernel_size // 2 + 1 : kernel_size // 2 + 1, -kernel_size // 2 + 1 : kernel_size // 2 + 1]
normal = 1 / (2.0 * np.pi * sigma**2)
g = np.exp(-((x**2 + y**2) / (2.0 * sigma**2))) * normal
g = g / g.sum()
# 应用高斯核进行卷积
filtered_image = np.zeros_like(image)
for i in range(image.shape[0]):
for j in range(image.shape[1]):
filtered_image[i, j] = np.sum(g * image[i - kernel_size // 2 : i + kernel_size // 2 + 1,
j - kernel_size // 2 : j + kernel_size // 2 + 1])
return filtered_image
# 使用高斯滤波器处理图像
filtered_image = gaussian_filter(noisy_image)
```
这段代码创建了一个高斯核,然后使用它来对图像进行卷积,从而实现噪声的消除。高斯滤波是一种有效的图像去噪方法,尤其在去除高斯噪声方面表现优异。
概率论的运用不仅限于图像的去噪处理,在图像识别、机器学习以及图像统计分析中也具有广泛的应用。
#### 2.2.2 随机过程与图像分析
随机过程是时间序列和空间过程的总称,它们的状态不能完全预测,但可以描述其概率分布。在图像处理领域中,随机过程常常被用来描述像素值的统计特性。
在图像分析中,随机过程可以帮助我们理解图像的随机变化规律,比如纹理变化、云层变化等自然现象。
**应用实例**
在图像纹理分析中,马尔可夫随机场是一种常用的模型,它假设图像区域的像素值依赖于相邻像素的值。这个特性可以用于图像分割,我们可以根据像素间依赖关系将图像划分成不同的区域。
**实现方法**
实现马尔可夫随机场的方法之一是利用条件随机场(Conditional Random Field, CRF)。CRF是一种无向图模型,可以用于图像序列的像素或超像素的条件概率建模。
在代码中,我们可以使用专门的库来构建和训练CRF模型。例如,使用CRF库(如CRF++或python-crfsuite)进行像素级标注:
```python
from crfsuite import Tagger
# 训练CRF模型
tagger = Tagger()
tagger.open("path/to/model/file")
tagger.set_params({
'algorithm': 'lbfgs',
'c1': 1.0, # L1正则化参数
'c2': 1e-3, # L2正则化参数
'max_iterations': 100
})
# 训练数据需要转换为CRF库的格式
X_train = [...] # 特征矩阵
y_train = [...] # 标注结果
# 训练模型
tagger.train(X_train, y_train)
# 使用模型进行预测
X_test = [...] # 测试数据特征
tagger.set_params({
'feature.possible_states': ['background', 'object']
})
# 进行预测
y_pred = tagger.tag(X_test)
```
这段代码展示了如何训练一个CRF模型来对图像中的对象进行分割。我们首先训练模型,然后将测试数据通过训练好的模型得到预测结果。
随机过程在图像处理中的应用为理解图像的统计特性提供了一种方法,它在图像序列分析、图像分割以及图像识别等方面都有重要应用。
### 2.3 信号处理与图像复原
#### 2.3.1 离散信号处理基础
离散信号处理是数字图像处理的一个重要分支,它主要处理离散时间信号。在图像处理领域,由于图像通常被数字化并以像素数组的形式表示,因此它们可以看作是二维离散信号。
**基础概念**
- **采样**:将连续信号转换为离散信号的过程。
- **量化**:将连续的信号幅度转换为有限数量的离散值的过程。
- **滤波**:通过算法去除不需要的信号成分(如噪声),提取有用信息的过程。
**应用方法**
在图像处理中,信号处理的一个典型应用是图像去噪。图像噪声可能来源于传感器的不完善、传输过程中的干扰等,去除噪声是提高图像质量的一个关键步骤。
以Python为例,我们可以使用`scipy`库的滤波功能来实现图像去噪:
```python
from scipy import signal
import numpy as np
from PIL import Image
# 加载图像并转换为灰度
image = Image.open("path/to/image/file")
gray_image = image.convert('L')
# 转换为数组
arr = np.array(gray_image)
# 设计一个滤波器核,例如高斯滤波器
kernel = signal.gaussian(5, std=1.0)
kernel /= kernel.sum()
# 应用滤波器
filtered_arr = signal.convolve2d(arr, kernel, boundary='symm', mode='same')
# 将滤波后的数组转换回图像
filtered_image = Image.fromarray(filtered_arr.astype(np.uint8))
filtered_image.save("path/to/output/image/file")
```
这段代码首先加载了一张灰度图像,然后定义了一个高斯核,通过`convolve2d`函数进行二维卷积,实现图像去噪。通过这种方式,我们可以有效去除图像中的噪声,使得图像更清晰。
#### 2.3.2 图像退化模型与复原技术
图像在获取、传输和存储过程中可能受到多种因素的影响,导致图像退化。图像退化模型通常用于模拟这个过程。图像复原则是研究如何从退化的图像中恢复原始图像的过程。
**退化模型**
退化过程可以用数学模型来表示,例如:
```math
g(x, y) = h(x, y) * f(x, y) + n(x, y)
```
其中,`g(x, y)`是退化图像,`f(x, y)`是原始图像,`h(x, y)`是退化函数,`n(x, y)`是噪声项,`*`表示卷积。
**复原技术**
图像复原技术主要包括逆滤波、维纳滤波、盲去卷积等。以逆滤波为例,它试图通过计算逆滤波器来抵消退化函数的影响:
```math
f'(x, y) = \frac{g(x, y)}{h(x, y)}
```
在实践中,直接逆滤波通常会放大噪声,因此需要进行适当的调整。
通过逆滤波进行图像复原的Python代码示例如下:
```python
from scipy.signal import deconvolve
# 假设 degenerate_image 是退化的图像
# h 是已知的退化函数,可以通过逆滤波复原图像
f恢复, _ = deconvolve(degenerate_image, h)
```
`deconvolve`函数是`scipy.signal`库提供的去卷积函数。这里我们假设已经知道了退化函数`h`,可以使用去卷积方法复原图像`f恢复`。
图像复原在医学成像、卫星图像处理和数字取证等应用中非常关键。正确的退化模型和复原技术能够显著提升图像质量,帮助我们获取更多的图像细节。
# 3. 基本图像处理技术
## 3.1 空间域处理方法
### 3.1.1 点运算与图像增强
在图像处理中,点运算是最基础的空间域操作之一。它包括对图像中每一个像素点的值进行直接的数学运算,如灰度变换、对比度调整、阈值化等。这些操作可以通过简单的数学公式来完成,以改变图像的视觉效果,增强图像的细节或改善图像的对比度。
点运算中最常见的例子是对图像进行线性或非线性的灰度变换。一个典型的线性变换是对比度调整,它通过拉伸图像的灰度级分布范围来增强图像的对比度。例如,对于一幅灰度图,如果我们将每个像素的值乘以一个常数并且加上另一个常数,我们可以得到一幅对比度提高或降低的图像。
非线性变换的一个例子是对数变换,它常用于拉伸低灰度级的细节,而压缩高灰度级的细节。这在处理光照不均匀的图像时尤其有用。例如,对数变换可以通过公式 `S = c * log(1 + R)` 来实现,其中 `R` 是原始像素值,`S` 是变换后的像素值,`c` 是一个常数,用来控制曲线的斜率。
```python
import cv2
import numpy as np
# 加载原始图像
image = cv2.imread('original.jpg', 0)
# 线性变换
k = 1.5 # 对比度控制
b = 50 # 亮度控制
linear_transformed = cv2.convertScaleAbs(image, alpha=k, beta=b)
# 对数变换
c = 255 / np.log(1 + np.max(image))
log_transformed = c * np.log(1 + image)
# 保存并展示结果
cv2.imwrite('linear_transformed.jpg', linear_transformed)
cv2.imwrite('log_transformed.jpg', log_transformed)
cv2.imshow('Linear Transformed Image', linear_transformed)
cv2.imshow('Log Transformed Image', log_transformed)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
在上述代码中,我们使用了OpenCV库来加载一张灰度图像,并对其进行线性变换和对数变换。`cv2.convertScaleAbs` 用于执行线性变换,而对数变换则通过NumPy直接在像素值上应用。
### 3.1.2 邻域运算与图像平滑、锐化
邻域运算涉及对图像中每个像素周围的一个小区域(即邻域)进行操作。常见的邻域运算包括图像平滑和锐化,这些操作通常用于去除噪声或者增强图像边缘。
图像平滑通常通过低通滤波来实现,它能够减少图像中的噪声并产生更柔和的效果。平均滤波器是最简单的图像平滑方法,它通过用邻域像素的平均值替换中心像素值来工作。这可以通过卷积操作来实现,卷积核是一个所有值都等于1的矩阵,除中心元素外,大小等于邻域的大小。
```python
def average_blur(image, kernel_size):
# 创建一个均值滤波器核
kernel = np.ones((kernel_size, kernel_size), np.float32) / (kernel_size ** 2)
blurred_image = cv2.filter2D(image, -1, kernel)
return blurred_image
# 调用平均滤波函数
blurred_image = average_blur(image, 3)
cv2.imwrite('blurred_image.jpg', blurred_image)
```
相反,图像锐化用于增强图像中的边缘,使图像看起来更清晰。这通常通过增强图像中高频成分来实现,一种常见方法是使用拉普拉斯算子。拉普拉斯算子是一个二阶导数滤波器,可以用来突出图像中的高频细节,通常与原始图像进行组合来实现锐化效果。
```python
# 拉普拉斯锐化
laplacian = cv2.Laplacian(image, cv2.CV_64F)
sharpened_image = cv2.convertScaleAbs(image + laplacian)
cv2.imwrite('sharpened_image.jpg', sharpened_image)
```
## 3.2 频域处理方法
### 3.2.1 傅里叶变换在滤波中的应用
频域滤波是一种在图像的频率域进行滤波的方法,傅里叶变换是进入频域的关键工具。图像的任何变化,无论是在空间域还是在频率域,都反映了图像特征的不同方面。傅里叶变换将图像从空间域转换到频率域,这样图像就可以用不同频率的波形组合来表示。
在频域中,图像的低频成分通常对应于图像的缓慢变化部分,如渐变的背景或者低对比度的区域,而高频成分则对应于图像的边缘和细节。通过在频率域进行操作,可以实现各种图像处理效果,例如图像平滑、锐化、去噪等。
频域滤波的第一步通常是应用快速傅里叶变换(FFT)将图像转换到频域。接着,可以设计一个滤波器,它是一个矩阵,用于调整频率成分的权重。例如,一个低通滤波器可能允许低频部分通过,同时衰减高频部分。最后,使用逆快速傅里叶变换(IFFT)将处理后的图像返回到空间域。
```python
def fourier_filter(image, filter_func):
f = np.fft.fft2(image)
fshift = np.fft.fftshift(f)
rows, cols = image.shape
crow, ccol = rows//2, cols//2
fshift[crow-30:crow+30, ccol-30:ccol+30] = 0
f_ishift = np.fft.ifftshift(fshift)
img_back = np.fft.ifft2(f_ishift)
img_back = np.abs(img_back)
return img_back
# 使用自定义函数进行傅里叶滤波
filtered_image = fourier_filter(image, filter_func=None)
cv2.imwrite('filtered_image.jpg', filtered_image)
```
在这段代码中,我们创建了一个自定义函数 `fourier_filter`,它使用FFT将图像转换到频域,并在中心位置放置一个30x30的低通滤波器零区域,然后通过IFFT返回到空间域。
### 3.2.2 频域滤波器设计与应用
频域滤波器的设计取决于我们要实现的特定图像处理任务。滤波器通常分为两大类:低通滤波器和高通滤波器。低通滤波器允许低频信号通过,阻止单独的高频信号,这对于去除噪声或模糊图像很有用。高通滤波器则允许高频信号通过,用于增强图像的边缘细节。
设计一个好的滤波器需要考虑多个因素,包括所希望保留或去除的频率范围,以及滤波器的类型和形状。常见的滤波器形状有矩形、高斯和巴特沃斯。
例如,高斯滤波器是一种平滑滤波器,它在频域中具有平滑的下降曲线,这使得它在去除图像噪声的同时保留了更多的图像细节。高斯滤波器的核是高斯分布的二维形式,可以通过改变核的标准差来调整平滑程度。
```python
def gaussian_filter(image, sigma):
return cv2.GaussianBlur(image, (0, 0), sigmaX=sigma, sigmaY=sigma)
# 应用高斯滤波器
gaussian_blurred_image = gaussian_filter(image, 5)
cv2.imwrite('gaussian_blurred_image.jpg', gaussian_blurred_image)
```
通过上述代码,我们使用了OpenCV库中的 `GaussianBlur` 函数来对图像应用高斯滤波,其中 `sigma` 参数控制了滤波的程度。
## 3.3 彩色图像处理
### 3.3.1 彩色空间转换
彩色图像处理是数字图像处理中一个十分重要的领域。彩色图像包含多个通道,通常包含红、绿、蓝(RGB)三个颜色通道。由于人类视觉系统的复杂性,有时直接处理RGB颜色空间并不方便。因此,人们引入了不同的彩色空间来更好地进行图像处理操作。
最常用的彩色空间之一是YCbCr空间。在这里,Y代表亮度(Luminance)信息,而Cb和Cr则代表色度(Chrominance)信息。通过将RGB转换到YCbCr空间,可以单独处理亮度和色度信息,这在压缩视频信号时尤其有用。
```python
# 将RGB图像转换到YCbCr空间
image_ycbcr = cv2.cvtColor(image, cv2.COLOR_BGR2YCrCb)
y, cb, cr = cv2.split(image_ycbcr)
```
在上述代码中,我们使用OpenCV函数 `cvtColor` 将RGB图像转换到YCbCr空间,并通过 `split` 函数将各个通道分离开来。
### 3.3.2 彩色图像增强与分割
彩色图像增强是提高图像视觉质量的过程,这通常涉及到色彩校正、色彩空间转换和色彩映射等技术。增强的目标是使图像的特定部分更加突出,或者改善图像的全局视觉效果。
色彩校正的一个常见方法是使用直方图均衡化。直方图均衡化是一种统计方法,用于将图像转换到均匀的色调分布,从而增加图像的对比度。它特别适用于改善光照不足或颜色深度不足的图像。
```python
# 对Y通道应用直方图均衡化
y_eq = cv2.equalizeHist(y)
# 合并Y通道和原始的Cb、Cr通道
image_ycbcr_eq = cv2.merge([y_eq, cb, cr])
image_enhanced = cv2.cvtColor(image_ycbcr_eq, cv2.COLOR_YCrCb2BGR)
cv2.imwrite('image_enhanced.jpg', image_enhanced)
```
在上述代码中,我们使用 `equalizeHist` 函数仅对Y通道进行直方图均衡化,然后将增强的Y通道重新合并回YCbCr颜色空间,并转换回RGB颜色空间以显示增强效果。
色彩分割是根据图像的色彩信息将图像分割成不同的区域。在一些应用中,如图像分析、目标跟踪和识别,色彩分割是一个非常有用的工具。例如,可以使用特定颜色范围的阈值来识别图像中的对象。
色彩分割的技术之一是使用颜色直方图的聚类方法。另一种常用的方法是使用颜色空间中的色彩分割,如根据色调、饱和度和亮度信息来划分图像区域。
```python
# 基于颜色的分割示例
# 假设我们要分割图像中的蓝色区域,首先将RGB图像转换到HSV空间
image_hsv = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)
# 定义蓝色的HSV范围
lower_blue = np.array([110,50,50])
upper_blue = np.array([130,255,255])
# 根据范围创建掩码
mask = cv2.inRange(image_hsv, lower_blue, upper_blue)
# 应用掩码进行分割
segmented_image = cv2.bitwise_and(image, image, mask=mask)
cv2.imwrite('segmented_image.jpg', segmented_image)
```
在上述代码中,我们首先将RGB图像转换到HSV空间,这是根据色彩进行分割的理想空间。接着,我们定义了蓝色范围,生成了一个掩码,并使用该掩码通过 `bitwise_and` 函数来提取出蓝色区域。
### 彩色空间转换与增强案例
让我们来看一个使用Python和OpenCV进行彩色图像处理的实际案例。我们的目标是将一个RGB彩色图像转换到YCbCr空间,然后对亮度通道应用直方图均衡化,并使用该通道将增强后的亮度应用回原始图像。
```python
import cv2
import numpy as np
# 加载彩色图像
color_image = cv2.imread('color_image.jpg')
# 将图像转换到YCbCr空间
image_ycbcr = cv2.cvtColor(color_image, cv2.COLOR_BGR2YCrCb)
# 分离YCbCr通道
y, cb, cr = cv2.split(image_ycbcr)
# 对亮度通道Y应用直方图均衡化
y_eq = cv2.equalizeHist(y)
# 将均衡化的亮度通道Y与原始的色度通道Cb和Cr合并
image_ycbcr_eq = cv2.merge([y_eq, cb, cr])
# 将YCbCr空间转换回RGB空间以便显示
enhanced_color_image = cv2.cvtColor(image_ycbcr_eq, cv2.COLOR_YCrCb2BGR)
# 显示原始图像和增强后的图像
cv2.imshow('Original Color Image', color_image)
cv2.imshow('Enhanced Color Image', enhanced_color_image)
# 等待按键后关闭所有窗口
cv2.waitKey(0)
cv2.destroyAllWindows()
```
在这个案例中,我们使用OpenCV的函数成功地对图像的亮度通道进行了增强,并将增强后的图像在视觉上进行了改善。通过观察增强前后的图像,我们可以清楚地看到增强操作如何提高了图像的整体视觉效果。
# 4. 高级图像分析与特征提取
## 4.1 边缘检测与特征提取
### 4.1.1 边缘检测算法与应用
边缘检测是图像处理中的一种基本技术,它是计算机视觉中识别对象和解释图像内容的基础。边缘通常对应于图像中场景亮度的不连续变化,这可以是由于深度、表面方向、光照条件或材质的突然变化所引起。
边缘检测算法的核心在于使用特定的边缘检测算子来识别图像中的边缘。常用的边缘检测算子包括Sobel算子、Canny算子、Prewitt算子等。这些算子通常基于图像的一阶或二阶导数,通过分析图像强度函数的一阶导数或二阶导数来确定图像中边缘的位置。
以Canny算子为例,它是一种多阶段的边缘检测算法,包含四个主要步骤:
1. **高斯滤波**:首先应用高斯滤波器平滑图像,以减少噪声的影响。
2. **计算梯度**:使用Sobel算子在水平和垂直方向计算图像的梯度幅值和方向。
3. **非极大值抑制**:对梯度幅值进行非极大值抑制,从而细化边缘。
4. **滞后阈值**:通过滞后阈值方法连接边缘并消除噪声。
Canny算子通过其多阶段的处理,提供了对边缘的精确检测,这使得它成为检测图像边缘的首选方法之一。
```python
import cv2
import numpy as np
# 读取图像
image = cv2.imread('path_to_image.jpg', cv2.IMREAD_GRAYSCALE)
# 应用高斯滤波
blurred = cv2.GaussianBlur(image, (5, 5), 0)
# Canny边缘检测
edges = cv2.Canny(blurred, threshold1=50, threshold2=150)
# 显示结果
cv2.imshow('Canny Edges', edges)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
在上述代码中,我们首先读取了一张灰度图像,然后应用高斯滤波来平滑图像。之后,使用`cv2.Canny()`函数执行边缘检测,其中`threshold1`和`threshold2`是用于滞后阈值选择的两个阈值。最后,我们展示了边缘检测的结果。
### 4.1.2 特征提取方法与技术
特征提取是从图像中识别和提取信息的过程,这些信息可以用于图像分析、分类和识别任务。有效的特征提取技术能够显著提高图像处理任务的准确性和效率。
常见的特征提取方法包括:
1. **HOG(Histogram of Oriented Gradients)特征**:它统计了图像局部区域中梯度的方向和强度信息,广泛应用于人体检测和识别。
2. **SIFT(Scale-Invariant Feature Transform)特征**:这是一种尺度不变的特征描述符,用于对象识别和图像匹配。
3. **ORB(Oriented FAST and Rotated BRIEF)特征**:这是一种改进的FAST关键点检测和BRIEF描述符的组合,用于旋转和尺度不变的特征匹配。
特征提取技术的选择取决于特定的应用和需求。例如,如果应用场景对旋转和尺度变化有较强的鲁棒性需求,那么SIFT或ORB可能是更好的选择。如果关注实时性能,可能更适合使用HOG特征。
特征提取技术的选择和使用通常与机器学习或深度学习算法相结合,以提高识别和分类任务的性能。通过选择适当的特征提取方法,可以增强模型对图像数据的理解能力,从而提升最终应用的准确性和可靠性。
## 4.2 图像分割技术
### 4.2.1 阈值分割与区域生长
图像分割是将数字图像划分为多个部分或区域的过程,每个部分都具有特定的特征或意义。图像分割技术是高级图像分析中的重要组成部分,它是后续图像处理和分析任务的基础。
**阈值分割**是图像分割中最基本的技术之一,它通过设定一个或多个阈值将像素分到不同的类别中。简单的阈值分割可以使用全局阈值将图像二值化,也可以使用自适应阈值分割方法来适应图像亮度的不均匀变化。
```python
import cv2
# 读取图像
image = cv2.imread('path_to_image.jpg', cv2.IMREAD_GRAYSCALE)
# 应用阈值分割
_, thresholded = cv2.threshold(image, 128, 255, cv2.THRESH_BINARY)
# 显示结果
cv2.imshow('Thresholded Image', thresholded)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
在上面的代码中,我们使用了全局阈值128将图像二值化。`cv2.threshold()`函数的第一个参数是输入的灰度图像,第二个参数是阈值,第三个参数是当像素值高于阈值时赋予的最大值,第四个参数用于选择阈值方法。
**区域生长**是一种基于区域的分割方法,它从一个或多个种子点开始,根据像素之间的相似性准则(如灰度、纹理等)逐渐将邻近的像素加入到区域中。区域生长的关键是选择合适的种子点和相似性准则。
区域生长算法的步骤通常包括:
1. **种子选择**:从图像中选择一个或多个种子点。
2. **相似性准则**:定义像素间相似性的标准。
3. **增长过程**:从种子点开始,将满足相似性准则的邻近像素并入当前区域。
4. **区域合并与分割**:将图像分割成不同的区域。
区域生长算法的实现相对复杂,但它在处理具有明确定义的区域结构时非常有效。
### 4.2.2 分水岭算法与水平集方法
**分水岭算法**是一种模拟地形地貌中水流的算法,通过模拟水流的流域边界来实现图像的分割。它是图像分割中的另一种常用技术,尤其适用于检测图像中的重叠物体。
分水岭算法的核心思想是从图像的局部最小值点开始“灌水”,并逐步填满每一个局部最小值所形成的盆地。当水流从不同的盆地开始汇合时,便形成了分水岭。在图像处理中,分水岭的边缘即为分割线。
```python
import cv2
import matplotlib.pyplot as plt
from skimage.feature import peak_local_max
from skimage.segmentation import watershed
# 读取图像
image = cv2.imread('path_to_image.jpg')
# 转换为灰度图像并应用高斯滤波
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
blurred = cv2.GaussianBlur(gray_image, (5, 5), 0)
# 应用阈值分割
_, thresholded = cv2.threshold(blurred, 128, 255, cv2.THRESH_BINARY)
# 检测局部最大值作为种子点
local_max = peak_local_max(blurred, indices=False, min_distance=10)
markers = cv2.connectedComponents((thresholded == 0).astype(np.uint8))[1]
markers = markers + 1
markers[local_max] = 0
# 执行分水岭算法
segmentation = watershed(-blurred, markers)
# 显示结果
plt.imshow(segmentation)
plt.show()
```
在上面的代码中,我们首先读取图像并转换为灰度图像,然后进行高斯滤波和阈值分割。使用`peak_local_max`函数检测局部最大值作为种子点,然后利用`watershed`函数执行分水岭算法。最终,我们使用matplotlib展示分割结果。
分水岭算法能够有效地将重叠的物体分开,但如果没有正确地选择种子点和进行预处理,可能会导致过度分割的问题。因此,实际应用中通常需要结合其他技术来优化分割结果。
**水平集方法**(Level Set Methods)是一种基于偏微分方程的图像分割技术,它通过初始化为函数的曲线或曲面,并让它们在演化过程中自然地移动,以适应图像特征。水平集方法的优势在于能够处理拓扑变化,如物体的合并和分裂,适合于处理复杂的图像分割任务。
## 4.3 形态学图像处理
### 4.3.1 形态学运算与应用
形态学图像处理是一种使用特定形状的结构元素来影响图像的方法。它包含一系列操作,如腐蚀(Erosion)、膨胀(Dilation)、开运算(Opening)、闭运算(Closing),这些都是形态学图像处理中非常重要的操作。
- **腐蚀**:通过结构元素在图像中移动,减小图像中明亮区域的大小,可以用来去除小的噪声或不重要的细节。
- **膨胀**:与腐蚀相反,它通过结构元素在图像中移动,增加图像中明亮区域的大小,有助于填补物体内部的空洞。
- **开运算**:是先腐蚀后膨胀的过程,有助于去除小的对象,平滑较大的对象边界,而不会明显改变它们的面积。
- **闭运算**:是先膨胀后腐蚀的过程,有助于填充小的空洞和裂缝,平滑对象边界,同样不会明显改变面积。
形态学操作的实现代码如下:
```python
import cv2
import numpy as np
# 读取图像
image = cv2.imread('path_to_image.jpg', cv2.IMREAD_GRAYSCALE)
# 定义一个结构元素
kernel = np.ones((5, 5), np.uint8)
# 腐蚀操作
eroded = cv2.erode(image, kernel, iterations=1)
# 膨胀操作
dilated = cv2.dilate(image, kernel, iterations=1)
# 开运算
opened = cv2.morphologyEx(image, cv2.MORPH_OPEN, kernel)
# 闭运算
closed = cv2.morphologyEx(image, cv2.MORPH_CLOSE, kernel)
# 显示结果
cv2.imshow('Eroded Image', eroded)
cv2.imshow('Dilated Image', dilated)
cv2.imshow('Opened Image', opened)
cv2.imshow('Closed Image', closed)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
上述代码中,我们定义了一个5x5的结构元素,然后分别执行了腐蚀、膨胀、开运算和闭运算。通过这些操作,可以对图像进行各种形态学处理,以达到预期的图像分析效果。
### 4.3.2 结构元素设计与优化
结构元素的设计是形态学图像处理中的关键因素。结构元素的形状、大小和构成方式直接影响到形态学操作的效果。因此,根据特定的应用背景和图像特性来优化结构元素的设计显得尤为重要。
- **结构元素的形状**:常见的形状包括矩形、圆形和十字形等。选择适当的形状可以更有效地处理图像中的特定结构。
- **结构元素的大小**:结构元素的尺寸应根据目标对象的尺寸来确定。较大的结构元素可以平滑更大的区域,但可能会导致对象边界模糊。
- **构成方式**:结构元素也可以通过组合不同的简单形状来创建,以适应复杂的图像处理需求。
例如,在处理具有复杂形状的物体时,可能需要自定义结构元素,以确保形态学操作能准确地反映出物体的特性。设计时可以通过实验不同的结构元素,分析它们对特定图像处理任务的影响,从而确定最佳的结构元素配置。
```python
# 自定义结构元素
custom_kernel = np.array([[0, 1, 0],
[1, 1, 1],
[0, 1, 0]])
# 应用自定义结构元素进行形态学操作
custom_opened = cv2.morphologyEx(image, cv2.MORPH_OPEN, custom_kernel)
# 显示结果
cv2.imshow('Custom Opened Image', custom_opened)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
在这段代码中,我们定义了一个自定义的结构元素,然后使用这个元素执行开运算。通过这种方式,我们可以更精确地控制形态学操作对特定图像区域的影响。这种灵活的设计和优化过程是提高图像分析准确度的关键步骤。
# 5. 图像处理算法实战演练
## 5.1 实际案例分析
### 5.1.1 案例背景与问题定义
在本节中,我们将深入探讨一个实际图像处理案例:面部识别系统中的图像预处理。面部识别系统广泛应用于安防、个性化服务和移动设备解锁等多种场景。其成功的关键之一在于如何准确高效地处理人脸图像数据。面部识别系统通常需要一个清晰的、光照均匀的脸部图像,但实际获取的图像往往因为噪声、光照变化、面部表情以及姿态变化等问题而受到影响。因此,图像预处理在这个问题上的作用不容小觑。
### 5.1.2 算法选择与实施步骤
针对上述问题,我们选择实施以下算法步骤:
1. **灰度转换**:将彩色图像转换为灰度图像,以减少计算复杂性。
2. **直方图均衡化**:增强图像的对比度。
3. **高斯模糊**:减少图像噪声。
4. **局部二值化**:分割出可能的面部区域。
5. **边缘检测**:识别面部轮廓。
## 5.2 编程实践与代码实现
### 5.2.1 使用Python与OpenCV实现算法
下面的代码使用Python和OpenCV库来实现上述图像预处理步骤:
```python
import cv2
import numpy as np
# 读取图像
image = cv2.imread('face_image.jpg')
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 直方图均衡化增强对比度
equalized_image = cv2.equalizeHist(gray_image)
# 高斯模糊去除噪声
blurred_image = cv2.GaussianBlur(equalized_image, (5, 5), 0)
# 自适应阈值局部二值化
binary_image = cv2.adaptiveThreshold(blurred_image, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C,
cv2.THRESH_BINARY_INV, 11, 2)
# Canny边缘检测
edges = cv2.Canny(binary_image, 100, 200)
# 显示处理结果
cv2.imshow('Original', image)
cv2.imshow('Gray', gray_image)
cv2.imshow('Equalized', equalized_image)
cv2.imshow('Blurred', blurred_image)
cv2.imshow('Binary', binary_image)
cv2.imshow('Edges', edges)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
### 5.2.2 算法优化与性能评估
在实施算法后,我们还需要进行算法优化和性能评估。优化可能包括调整高斯核大小、直方图均衡化的参数或边缘检测的阈值,以适应不同的图像条件。性能评估则可通过比较处理前后图像质量的标准指标(如信噪比、峰值信噪比、结构相似性等)来进行。
## 5.3 结果分析与讨论
### 5.3.1 处理结果的可视化与分析
通过上述代码,我们可以观察到每一步处理后的图像变化。直方图均衡化显著提升了图像的全局对比度,高斯模糊使图像变得平滑,局部二值化则有效地分割出了面部区域,而Canny边缘检测进一步加强了轮廓特征。
### 5.3.2 算法效果评估与案例总结
对图像的分析结果表明,该算法能有效预处理面部图像,为后续的面部识别算法提供更准确的输入数据。然而,该案例也暴露出算法的局限性,比如在处理侧脸或表情丰富的图像时可能不会那么有效。因此,未来研究可能需要加入深度学习等更先进的技术来提高算法的鲁棒性和准确性。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏以冈萨雷斯《数字图像处理》第四版为基础,深入浅出地讲解数字图像处理的各个方面。从入门基础到高级算法,从傅里叶变换到模式识别,再到边缘检测、形态学操作、图像融合和实时图像处理系统的设计,专栏涵盖了数字图像处理的方方面面。专栏内容循序渐进,适合初学者入门,也为有经验的图像处理人员提供进阶知识。通过学习本专栏,读者可以全面掌握数字图像处理的原理、技术和应用,成为一名合格的图像处理工程师。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
CENTUM VP软件安装与配置:新手指南,一步步带你成为专家

# 摘要
本文全面介绍了CENTUM VP软件的安装、配置及优化流程,并通过实战应用案例展示了其在工业过程控制中的实际运用。首先概述了CENTUM VP软件的特点和系统要求,接着详细阐述了安装前期的准备工作、安装过程中的关键步骤,以及安装后系统验证的重要性。本文重点探讨了CENTUM VP的高级配置
【CST-2020 GPU加速实战】:从入门到精通,案例驱动的学习路径
# 摘要
随着计算需求的不断增长,GPU加速已成为提高计算效率的关键技术。本文首先概述了CST-2020软件及其GPU加速功能,介绍了GPU加速的原理、工作方式以及与CPU的性能差异。随后,探讨了CST-2020在实际应用中实现GPU加速的技巧,包括基础设置流程、高级策略以及问题诊断与解决方法。通过案例研究,文章分析了GPU
【Vue翻页组件全攻略】:15个高效技巧打造响应式、国际化、高安全性的分页工具
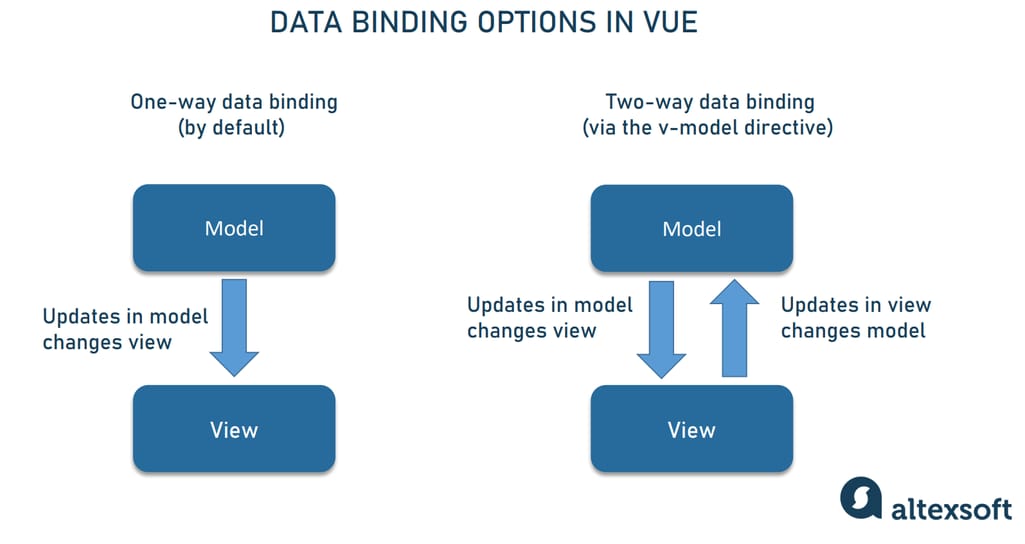
# 摘要
本文详细探讨了Vue翻页组件的设计与实现,首先概述了翻页组件的基本概念、应用场景及关键属性和方法。接着,讨论了设计原则和最佳实践,强调了响应式设计、国际化支持和安全性的重要性。进一步阐述了实现高效翻页逻辑的技术细节,包括分页算法优化、与Vue生命周期的协同,以及交互式分页控件的构建。此外,还着重介绍了国际化体验的打
Pspice信号完整性分析:高速电路设计缺陷的终极解决之道
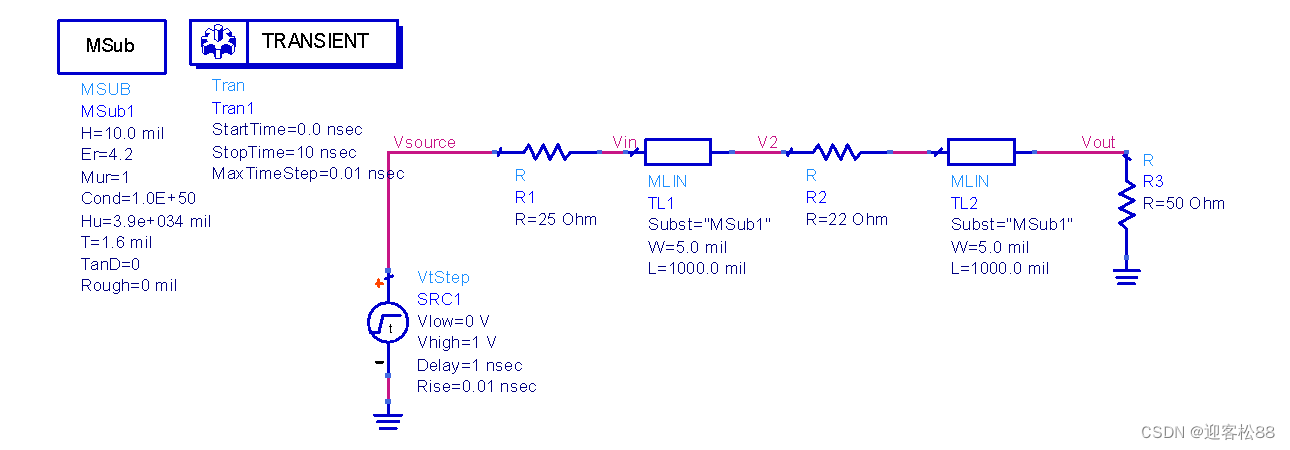
# 摘要
信号完整性是高速电路设计中的核心问题,直接影响电路性能和可靠性。本文首先概述了信号完整性分析的重要性,并详细介绍了相关理论基础,包括信号完整性的概念、重要性、常见问题及其衡量指标。接着,文章深入探讨了Pspice模拟工具的功能和在信号完整性分析中的应用,提出了一系列仿真流程和高级技巧。通过对Pspice工具在具体案例中的应用分析,本文展示了如何诊断和解决高速电路中的反射、串
实时系统设计师的福音:KEIL MDK中断优化,平衡响应与资源消耗
# 摘要
本文深入探讨了实时系统中中断管理的重要性,分析了MDK中断管理机制
iText-Asian字体专家:解决字体显示问题的5大技巧

# 摘要
本文全面介绍了iText-Asian字体专家的使用和挑战,深入探讨了iText-Asian字体显示的问题,并提供了一系列诊断和解决策略。文章首先概
面板数据处理终极指南:Stata中FGLS估计的优化与实践
# 摘要
本文系统地介绍了面板数据处理的基础知识、固定效应与随机效应模型的选择与估计、广义最小二乘估计(FGLS)的原理与应用,以及优化策略和高级处理技巧。首先,文章提供了面板数据模型的理论基础,并详细阐述了固定效应模型与随机效应模型的理论对比及在Stata中的实现方法。接着,文章深入讲解了FGLS估计的数学原理和在Stat
ngspice蒙特卡洛分析:电路设计可靠性评估权威指南
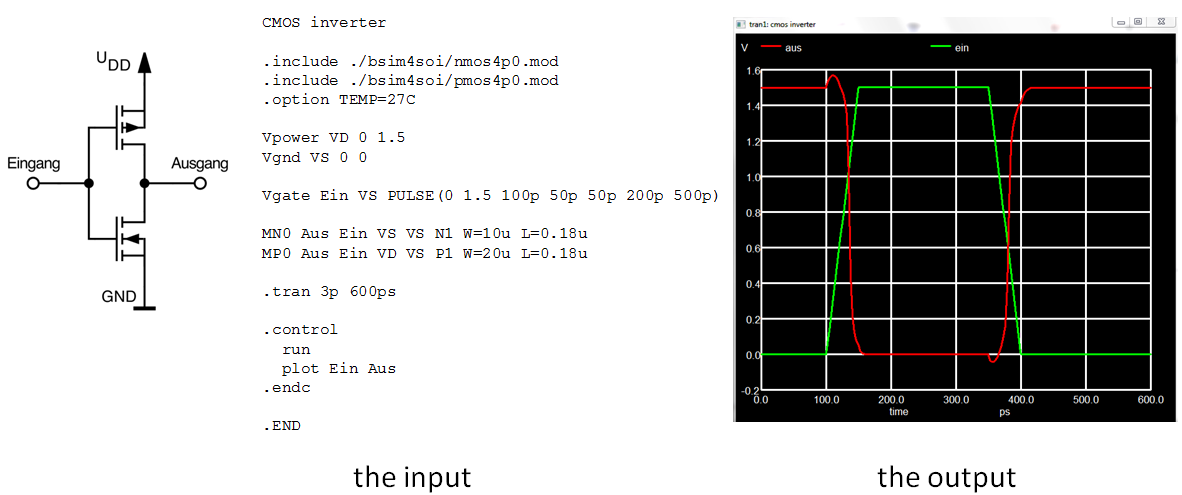
# 摘要
本文系统阐述了ngspice软件在电路设计中应用蒙特卡洛分析的基础知识、操作实践和高级技巧。通过介绍蒙特卡洛方法的理论基础、电路可靠性评估以及蒙特卡洛分析的具体流程,本文为读者提供了在ngspice环境下进行电路模拟、参数分析和可靠性测试的详细指南。此外,本文还探讨了在电路设计实践中如何通过蒙特卡洛分析进行故障模拟、容错分析和电路优化,以及如何搭建和配置ngspice模拟环境。最后,文章通过实际案例分析展示了蒙特卡洛分
红外循迹项目案例深度分析:如何从实践中学习并优化设计
# 摘要
红外循迹技术作为一种精确引导和跟踪技术,在自动化和机器人技术中具有广泛的应用。本文首先概述了红外循迹技术的基本概念和理论基础,继而详细介绍了一个具体的红外循迹项目从设计基础到实践应用的过程。项目涉及硬件搭建、电路设计、软件算法开发,并针对实现和复杂环境下的适应性进行了案例实践。本文还探讨了红外循迹设计过程中的挑战,并提出相应的解决方案,包括创新设计思路与方法,如多传感器融合技术和机器学习应用。最后,文章探讨了红外循迹技术的进阶扩展、项目管
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )