步进电机驱动器动态响应:影响因素与优化策略综述
发布时间: 2024-12-27 00:15:40 阅读量: 7 订阅数: 11 
# 摘要
步进电机驱动器的动态响应性能是实现精确控制的关键指标之一。本文从步进电机驱动器的动态响应基础出发,系统分析了影响动态响应的关键因素,包括步进电机的机械特性、驱动器的电气性能以及系统控制参数。通过详细的测试与评估,提出了动态响应的测试方法和性能评估指标,并讨论了如何通过优化选型、控制算法及硬件改进来提高驱动器的动态响应。最后,本文通过实际应用案例分析,验证了优化策略在精密定位系统和高速运动控制中的有效性,为相关领域的研究和应用提供了参考。
# 关键字
步进电机;动态响应;机械特性;电气性能;控制参数;性能评估;系统优化
参考资源链接:[ODrive v3.5 无刷电机控制器原理图解析](https://wenku.csdn.net/doc/6401abb3cce7214c316e92f5?spm=1055.2635.3001.10343)
# 1. 步进电机驱动器的动态响应基础
步进电机驱动器的动态响应是电机控制系统中的核心概念,它描述了驱动器对输入信号变化的响应速度和精度。在介绍动态响应之前,我们首先需要了解步进电机的基本工作原理以及驱动器如何控制电机的运动。本章将从基础出发,解析步进电机驱动器动态响应的基本定义、类型及其在运动控制系统中的作用。
动态响应主要分为速度响应和位置响应,速度响应关注驱动器在给定输入变化后电机速度的变化过程,而位置响应则更关注电机在运动过程中对位置指令的跟踪能力。一个理想的动态响应应该具有快速的反应速度和准确的位置控制能力,以确保系统整体性能的优化。
在电机控制系统设计中,动态响应的研究不仅有助于理解系统对控制信号的即时响应,而且对于预测和改善系统的性能具有重要意义。因此,设计者和工程师必须深入理解动态响应的特性,以便在实际应用中做出正确的选型和技术改进。
```mermaid
graph LR
A[步进电机基础] --> B[动态响应基本概念]
B --> C[速度响应]
B --> D[位置响应]
C --> E[快速反应速度]
D --> F[准确位置控制]
```
以上是第一章的基础内容。接下来,我们将进一步深入探讨影响步进电机驱动动态响应的关键因素。
# 2. ```
# 第二章:影响步进电机驱动动态响应的关键因素
在探讨步进电机驱动器动态响应时,有多个关键因素会影响最终的性能表现。本章将深入分析这些因素,包括步进电机的机械特性、驱动器的电气性能和系统控制参数。每个关键因素都对步进电机的精度、速度和稳定性有着直接或间接的影响。
## 2.1 步进电机的机械特性
### 2.1.1 步距角与微步技术
步进电机的步距角决定了其最小旋转角度,这直接影响了电机的定位精度。步距角越小,电机的定位就越精细。传统的步进电机步距角一般为1.8度,即每步旋转1.8度。而微步技术则可以将电机的步距角进一步细分,例如将1.8度的步距细分为16微步,从而实现更平滑的运动和更精确的位置控制。
```mermaid
flowchart LR
A[步距角1.8度] -->|微步细分| B[微步角度]
B --> C[1/16微步]
C --> D[1/32微步]
D --> E[1/64微步]
```
### 2.1.2 转矩与负载特性分析
转矩是步进电机驱动动态响应的关键参数之一,它决定了电机克服负载的能力。电机在不同速度下能够提供的最大转矩是不同的,这通常在电机的扭矩-速度曲线图中表示。对于任何给定的负载,电机必须有足够的转矩来保持运动,而不会失步。负载特性包括惯性负载、摩擦负载和外部环境负载等因素,这些都直接影响到电机的响应和性能。
## 2.2 驱动器的电气性能
### 2.2.1 驱动电路的设计与选型
步进电机的驱动电路设计需要考虑电机的额定电压和电流,以确保在不损害电机的前提下提供足够的动力。正确的驱动器选型可以使得电机工作在最佳状态,防止过流、过压等现象。驱动器的选型还取决于应用场合对速度、加速度以及精度的具体要求。
### 2.2.2 供电电压和电流对响应的影响
供电电压和电流的大小会直接影响步进电机的动态响应。供电电压的增加可以提高电机的响应速度,但是同时也会增加电机和驱动器的热负荷。因此,必须在供电电压和电流的选择上找到一个平衡点,确保系统的稳定性和可靠性,同时满足应用的动态响应要求。
## 2.3 系统控制参数
### 2.3.1 加速度和减速度设置
加速度和减速度的设置决定了电机在启动和停止时的动态特性。不恰当的加速度设置会导致电机失步或振动,而减速度设置不当可能会导致电机在停止时产生位置误差。因此,需要仔细调节这些参数以确保电机平稳且快速地达到所需速度。
### 2.3.2 脉冲频率与细分设置对动态性能的影响
步进电机的脉冲频率决定了其旋转速度,而细分设置则影响了步距角的精确度。较高的脉冲频率可以提高电机的响应速度和运行精度,但也需要驱动器能够精确地控制电机电流。细分设置过高可能会增加系统的复杂性和成本,而设置过低则可能无法满足某些高精度应用的要求。
```markdown
| 脉冲频率(Hz) | 细分设置 | 速度 | 精度 |
|--------------|----------|------|------|
| 500 | 1/16 | 快 | 精确 |
| 1000 | 1/32 | 更快 | 微调 |
| 2000 | 1/64 | 最快 | 细化 |
```
在下一章节中,我们将探讨步进电机驱动器动态响应的测试与评估方法,这些方法对于准确地衡量和理解驱动器性能至关重要。
```
# 3. 步进电机驱动器动态响应的测试与评估
## 3.1 动态响应测试方法
动态响应是步进电机驱动器性能的重要指标,它直接关系到系统的稳定性和精确度。对动态响应的测试通常涉及到一系列精密的测量和评估手段。在本节中,我们将深入探讨如何通过测试设备与技术,评估步进电机驱动器的动态响应特性。
### 3.1.1 测试设备与测量技术
进行步进电机驱动器的动态响应测试时,需要配备合适的测试设备。一般来说,以下设备是必不可少的:
- 示波器:用于监测电机的电压和电流波形。
- 编码器:实时跟踪电机的位置信息,记录步进动作。
- 高速相机:捕捉电机运动的细节,用于分析振动和响应时间。
- 信号发生器:产生控制信号,测试电机对指令的响应速度。
- 计算机辅助分析软件:用于数据的采集、处理和分析。
在实际测试过程中,可以采取以下步骤进行动态响应测试:
1. 设定电机参数,如脉冲频率、加速度、减速度等。
2. 通过信号发生器发出控制脉冲。
3. 使用编码器记录电机的位置响应,通过示波器监视电压和电流波形。
4.

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏以“ODrive_v3.5_SCH.pdf”为标题,深入探讨了电机驱动器应用的各个方面。专栏文章涵盖了电机驱动器选型、优化、故障排除、控制算法、性能分析、散热、电源管理、同步控制、通信协议、平滑运动、微步控制、系统集成、电磁兼容性、过流保护和动态响应等关键主题。通过提供全面的指南和深入的分析,本专栏旨在帮助读者了解电机驱动器技术的方方面面,并为其在各种应用中的高效使用提供实用的见解。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【调试达人】:Eclipse中JFreeChart图表生成的高效调试技巧

# 摘要
本文详细介绍了Eclipse集成开发环境中使用JFreeChart生成、调试和优化图表的方法。首先概述了JFreeChart图表生成的基本原理和结构,然后深入探讨了如何在Eclipse中搭建调试环境、诊断和解决图表生成过程中的常见问题。文章还涉及了图表定制化、复杂数据集展示和交互功能实现的实战应用,以及如何进行代码重构
性能提升秘籍:Vector VT-System测试效率的关键优化步骤
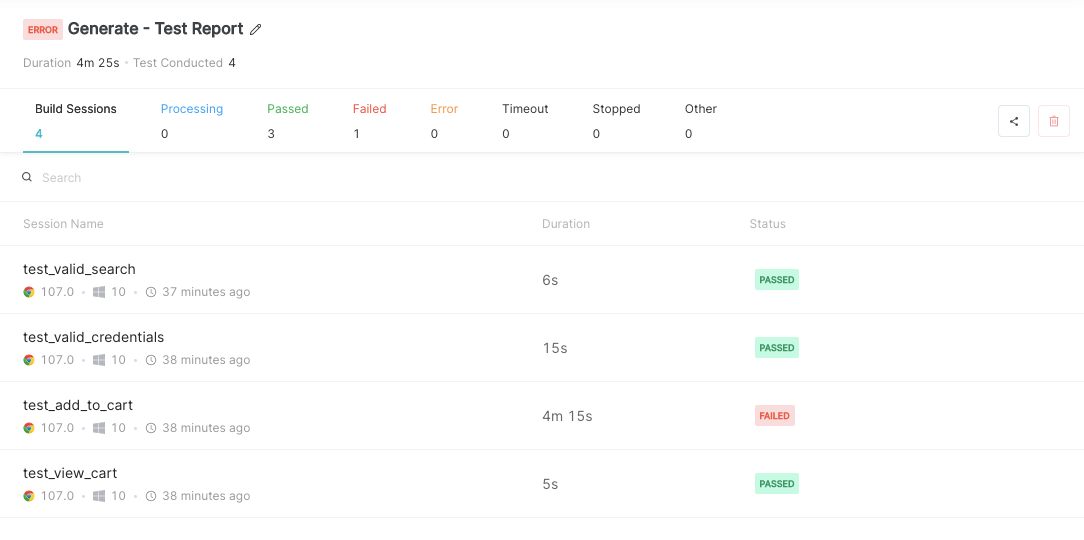
# 摘要
随着软件和系统的日益复杂化,性能测试成为确保产品质量和系统稳定性的关键环节。本文系统地介绍了Vector VT-System在性能测试中的应用,从基础理论出发,探讨了性能测试的目标与意义、类型与方法,并提供了性能测试工具的选择与评估标准。进一步深入配置与优化VT-System测试环境,包括测试环境搭建、测试脚本开发
揭秘混沌通信:DCSK技术如何革命性提升无线网络安全(权威技术指南)
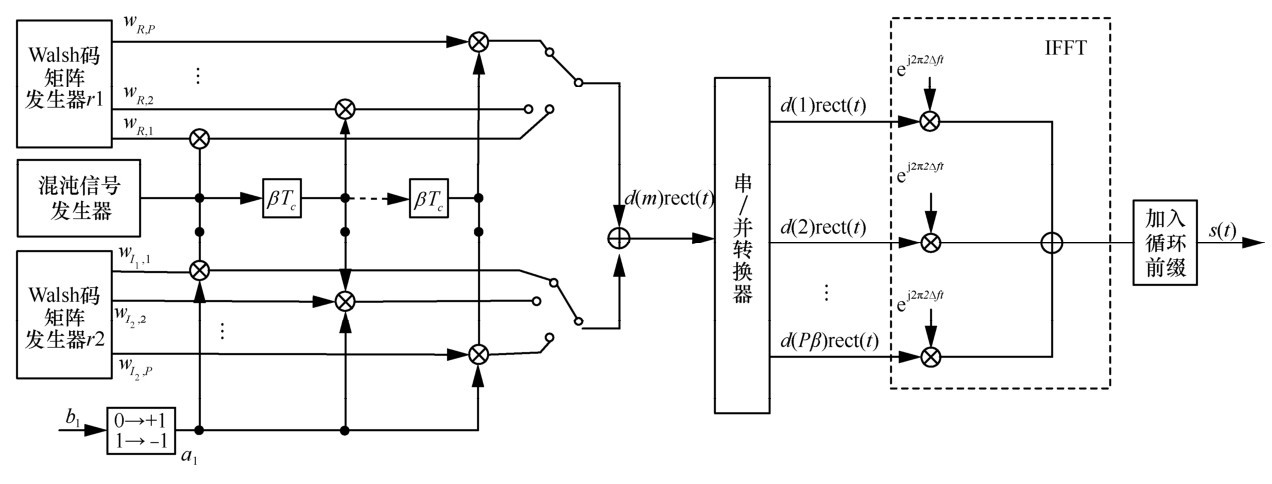
# 摘要
混沌通信作为一门新兴技术,其基础理论与应用在信息安全领域日益受到关注。本文首先介绍了混沌通信的基础知识,然后深入解析直接序列混沌键控(DCSK)技术,探讨其理论基础、关键技术特性以及在无线网络中的应用。接着,文章着重分析了DCSK技术的实现与部署,包括硬件设计、软件编程以及网络部署和测试。此外,本文还讨论了DC
【故障排除必备】:RRU和BBU问题诊断与解决方案

# 摘要
本文重点探讨了无线通信系统中的射频拉远单元(RRU)和基带处理单元(BBU)的故障排除方法。文章首先介绍了RRU和BBU的基本工作原理及其系统架构,并详细阐述了它们的通信机制和系统诊断前的准备工作。随后,文章详细论述了RRU和BBU常见故障的诊断步骤,包括硬件故障和软件故障的检测与处理。通过具体的案例分析,本文深入展示了如何对射频链路问题、时钟同步故障以及信号覆盖优化进行有效的故障诊断
VS2022汇编项目案例分析:构建高质量代码的策略与技巧
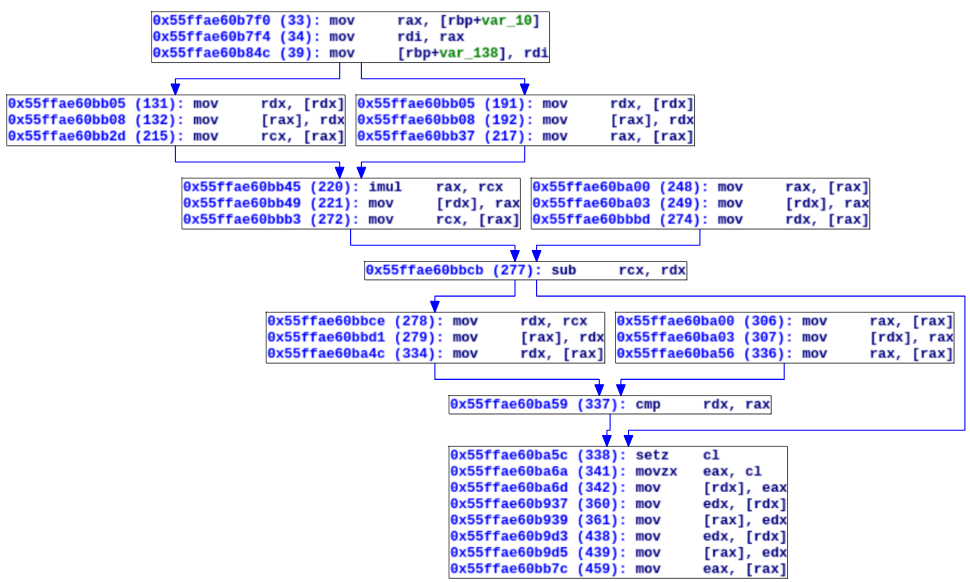
# 摘要
本文针对VS2022环境下的汇编语言基础及其在高质量代码构建中的应用展开了全面的研究。首先介绍了汇编语言的基本概念和项目架构设计原则,重点强调了代码质量标准和质量保证实践技巧。随后,深入探讨了VS2022内建的汇编开发工具,如调试工具、性能分析器、代码管理与版本控制,以及代码重构与优化工具的使用。文章进一步分析了构建高质量代码的策略,包括模块化编程、代码复
【PSCAD安装与故障排除】:一步到位,解决所有安装烦恼
# 摘要
本文系统介绍PSCAD软件的基础知识、系统需求、安装步骤及故障排除技巧。首先概述了PSCAD软件的功能和特点,随后详述了其在不同操作系统上运行所需的硬件和软件环境要求,并提供了详细的安装指导和常见问题解决方案。在故障排除部分,文章首先介绍了故障诊断的基础知识和日志分析方法,然后深入探讨了PSCAD的高级故障诊断技巧,包括使用内置
打造人机交互桥梁:三菱FX5U PLC与PC通信设置完全指南

# 摘要
本文旨在介绍和解析PC与PLC(可编程逻辑控制器)的通信过程,特别是以三菱FX5U PLC为例进行深入探讨。首先,概述了PLC与PC通信的基础知识和重要性,然后详细解释了三菱FX5U PLC的工作原理、硬件结构以及特性。接着,本文探讨了不同PC与PLC通信协议,包括Modbus和Ethernet/IP,并着重于如何选择和配置这些协议以适应具体应用
CATIA文件转换秘籍:数据完整性确保大揭秘

# 摘要
CATIA文件转换是产品设计与工程领域中的一项重要技术,它涉及将不同格式的文件准确转换以保持数据的完整性和可用性。本文系统地介绍了CATIA文件转换的理论基础、工具与技巧,以及实践应用,并探讨了进阶技术与未来展望。文章深入分析了转换过程中可能遇到的挑战,如数据丢失问题,以及应对的策略和技巧,例如使用标准化转换工具
CATIA_CAA二次开发新手必看:7个批处理脚本快速入门技巧

# 摘要
本文首先概述了CATIA_CAA二次开发的基础知识,着重于环境搭建和批处理脚本语言的基础。接着,深入探讨了批处理脚本编写技巧,包括自动化任务实现、错误处理和脚本效率提升。随后,文章详细介绍了批处理脚本与CAA API的交互,包括CAA API的基本概念、批处理脚本如何集成C
SAP登录日志合规性检查:5步骤确保安全合规性
# 摘要
随着信息安全法规的日益严格,SAP登录日志的合规性显得尤为重要。本文首先介绍了SAP登录日志的基本概念和合规性的法律及规范框架,然后阐述了合规性检查的理论基础,包括合规性检查流程、政策和原则以及风险评估与监控机制。接下来,文章详细讨论了合规性检查的实践操作,如审计计划制定、日志分析工具应用以及问题的发现与解决
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )