瑞萨RL78 G13 UART串口通信:调试与数据传输的高效方法
发布时间: 2024-12-27 22:11:16 阅读量: 4 订阅数: 11 
# 摘要
本文详细介绍了瑞萨RL78 G13微控制器在UART串口通信中的应用,从硬件连接与配置、软件编程实现、调试技巧到数据传输优化和安全机制的建立。文章首先概述了UART通信的基本概念和硬件接口标准,随后深入探讨了软件层面的实现细节,包括如何利用瑞萨固件库进行UART模块的初始化和数据传输的编程,以及中断和轮询两种通信模式的选择。在调试和优化方面,本文提供了多种调试工具和方法,并探讨了提高数据传输效率的技术手段。最后,文章讨论了高级数据传输协议的实现和UART通信的安全策略,为实现稳定和安全的数据通信提供了参考。
# 关键字
瑞萨RL78 G13;UART通信;固件库;中断驱动;数据传输优化;安全机制
参考资源链接:[瑞萨RL78/G13开发快速入门教程:搭建与实战指南](https://wenku.csdn.net/doc/5cazs0od1v?spm=1055.2635.3001.10343)
# 1. 瑞萨RL78 G13微控制器与UART串口通信基础
UART(Universal Asynchronous Receiver/Transmitter,通用异步收发传输器)是一种广泛应用于微控制器和计算机串行通信的协议。本章将为读者揭示RL78 G13微控制器如何利用UART实现数据通信的基础知识,覆盖从基础概念到实际应用的多个层面。
## 1.1 UART通信概述
UART通信允许微控制器与外围设备或其他微控制器进行点对点通信。通过两个信号线——TX(发送线)和RX(接收线)——UART可以实现异步通信,这意味着设备可以在没有共享时钟信号的情况下传输数据。RL78 G13微控制器,具有内置的UART功能模块,能够有效地实现此类通信。
## 1.2 RL78 G13微控制器与UART
RL78 G13微控制器支持多种通信接口,其中UART通信接口具备高度的灵活性和可靠性。它支持多速率通信,并且能够通过内置的波特率发生器配置波特率,满足不同通信需求。此外,它还允许开发者对数据位、停止位和校验位进行详细设置,以适应各种通信标准。
## 1.3 UART通信的初始化
在开始任何通信之前,初始化UART模块是必需的步骤。这通常包括配置波特率、数据格式(数据位、停止位、校验位)以及串口模式(如单工、半双工或全双工)。在瑞萨RL78 G13微控制器上,这些操作可以通过一系列的寄存器设置来完成,例如UCSR(UART Control and Status Register)和UBRR(UART Baud Rate Register)。
初始化代码示例可能如下:
```c
void UART_Init(unsigned long baudrate) {
// 配置波特率、数据位等参数
UCOV1 = 0; // 禁用发送缓冲区
UCRS1 = 0x00; // 设置停止位和数据位
UBRRL1 = UBRRH1 = baudrate; // 设置波特率
UCPOL1 = 0; // 设置时钟极性
// 配置完毕,启用UART模块
UCON1 = 0x80; // 启用UART模块
}
```
初始化函数之后,就可以利用RL78 G13微控制器的UART模块进行数据的发送和接收。本章提供的基础概念和初始化方法为后续深入探讨硬件配置、软件编程、调试技巧和数据传输优化奠定了坚实的基础。
# 2. 硬件连接与配置
### UART通信硬件接口标准
#### 信号线的定义和功能
通用异步收发传输器(UART)是一种广泛使用的串行通信接口,它允许微控制器与外部设备进行数据交换。UART接口通常包含以下几条信号线:
1. **TX(发送线)**:用于从微控制器发送数据到外部设备。
2. **RX(接收线)**:用于从外部设备接收数据到微控制器。
3. **GND(地线)**:为通信提供共同的参考电位。
4. **RTS/CTS(请求发送/清除发送)**(可选):用于硬件流控制,防止数据溢出。
5. **DCD(数据载波检测)/DSR(数据设备就绪)/DTR(数据终端就绪)(可选)**:用于其他高级功能,比如设备状态指示和握手。
在进行UART通信时,TX端口必须连接到RX端口,RX端口连接到TX端口。即数据发送方的TX引脚与数据接收方的RX引脚相连。
#### 硬件连接的要求和技巧
硬件连接是确保UART通信成功的第一步。在连接时,需要考虑以下几个要点:
1. **正确选择导线类型**:为了减少信号损失,应选择适当的导线类型,例如,较短的连接可以使用标准的双绞线。
2. **阻抗匹配**:确保传输线的特性阻抗与设备的阻抗匹配,以减少信号反射。
3. **电气隔离**:在高电压或复杂噪声环境下,考虑使用隔离器来保护微控制器。
4. **终端电阻**:在长距离传输时,可在接收端并联终端电阻,以减少信号反射。
5. **避免交叉连接**:确保TX和RX正确连接,不要将TX连接到TX,RX连接到RX。
### 配置UART通信参数
#### 波特率的设置与计算
波特率是UART通信中每秒传输的符号数,它决定了数据传输的速率。在配置UART时,必须确保通信双方的波特率一致。波特率的计算公式为:
```
波特率 = 时钟频率 / (16 × (256 - SMR.BR))
```
其中,`SMR.BR` 是串行模式寄存器中的波特率设置值。在实际应用中,应根据微控制器的时钟频率和所需的通信速率来确定这个值。
例如,如果使用的是16MHz的时钟频率,并且想要设置115200的波特率,可以通过调整 `SMR.BR` 的值来计算出合适的值:
```c
// 假设代码中定义了SMR寄存器
#define SMR (*(volatile unsigned char *)0x0018)
// 计算SMR.BR的值
SMR.BR = (16000000 / (16 * 115200)) - 1;
```
#### 数据位、停止位和校验位的配置
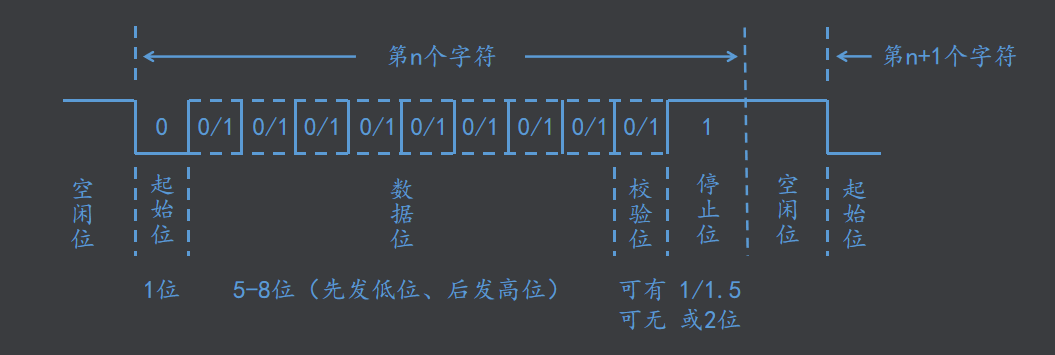
UART通信中的每一个数据包由起始位、数据位、可选的校验位和停止位组成。这些参数的配置需要通信双方一致:
- **数据位**:通常是8位,但也可以是7位或9位。
- **停止位**:通常是1位或2位,用于标识数据包的结束。
- **校验位**:用于错误检测,可以是奇校验、偶校验或无校验。
在配置这些参数时,一般根据通信需求来选择。例如,为了保证通信的可靠性和效率,通常会选择8数据位、1停止位、无校验位的配置。
```c
// 配置波特率和通信参数
#define SMR (*(volatile unsigned char *)0x0018)
#define SCR (*(volatile unsigned char *)0x0019)
// 设置波特率
SMR.BR = (16000000 / (16 * 115200)) - 1;
// 配置为8数据位、1停止位、无校验位
SCR.CKS = 0x00; // 设置时钟源
SCR.TE = 1; // 使能发送
SCR.RE = 1
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
该专栏提供了一个全面的瑞萨RL78 G13微控制器开发指南,从初学者入门到高级应用。它涵盖了基础教程、开发环境搭建、C语言编程、硬件设计、中断管理、时钟配置、I/O端口操作、ADC和DAC使用、定时器应用、SPI和I2C通信协议、UART串口通信、PWM控制、实时时钟、低功耗模式以及安全特性。该专栏旨在帮助开发者快速掌握RL78 G13微控制器,并为构建高效、可靠的嵌入式系统提供全面的支持。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【工业相机镜头全攻略】:从选型到保养,一步到位掌握核心技术

# 摘要
工业相机镜头是机器视觉系统中至关重要的组成部分,本文首先介绍了工业相机镜头的基础知识,随后详细探讨了镜头选型的要点,包括镜头参数解析、类型与应用场景以及实践考量。文章还阐述了镜头的正确
【C语言学生成绩管理系统】:掌握编程技巧,提升数据分析效率(全套教程)

# 摘要
本文深入探讨了使用C语言开发的学生成绩管理系统的设计与实现。首先概述了系统的基本架构,随后详细介绍了C语言基础和数据结构在系统中的应用,包括结构体、数组、链表及函数等概念。文章进一步阐述了系统的核心功能,例如成绩的输入存储、查询修改以及统计分析,并解释了高级编程技巧和优化方法在提升系统性能中的重要性。最后,本文讨论了用户界面设计原则、系统测试及未来功能拓展的策略,强调了系统集
帧同步与频偏校正:通信系统可靠性的关键提升

# 摘要
本文系统性地介绍了帧同步与频偏校正的基础理论、技术分析、实践应用、联合优化策略、系统仿真与性能评估以及未来的发展趋势和挑战。首先,阐述了帧同步的基本概念、方法和状态机设计,随后对频偏产生的原理、影响以及校正技术进行了深入探讨。进一步,文章提出联合优化框架,并探讨了算法设计与实现细节,以及在通信系统中的应用效果。仿真与性能评估章节通
STEP7指针编程速成课程:掌握PLC地址引用至性能调优15大技巧

# 摘要
本文旨在深入探讨STEP7指针编程的基础知识和高级应用,同时详细解释了PLC内存地址结构及其在数据处理和故障诊断中的重要性。通过对指针操作、数据块应用、间接寻址技术以及性能调优技巧的讲解,本文为读者提供了提高PLC系统效率与稳定性的实用方法。案例分析部分通过实际场景加深理解,并总结了故障排除和复杂逻辑控制的实施经验。课程总结与未来展
BT201模块故障排查手册:音频和蓝牙连接问题的快速解决之道
# 摘要
BT201模块作为一种广泛应用的音频与蓝牙通信设备,其稳定性和故障排除对于用户体验至关重要。本文针对BT201模块的音频连接和蓝牙连接问题进行了系统性分析,包括理论基础、故障诊断与解决方法,并通过实际案例深入探讨了故障排查流程和预防维护策略。此外,文中还介绍了高级故障排查工具和技巧,旨在为技术人员提供全面的故障处理方案。通过对BT201模块故障的深入研究与实践案例分析,本文为未来的故障排查提供了经验总结和技术创新的展望。
# 关键字
音频连接;蓝牙连接;故障诊断;预防维护;故障排查工具;技术展望
参考资源链接:[BT201蓝牙模块用户手册:串口控制与音频BLE/SPP透传](ht
提升无线通信:nRF2401跳频协议的信号处理技术优化指南
# 摘要
nRF2401跳频协议是无线通信领域的关键技术,本文首先概述了该协议的基本原理和应用场景。随后,深入探讨了信号处理的基础理论,包括跳频技术的工作原理、信号处理的数学模型以及噪声与干扰的影响分析。文章第三部分重点关注了nRF2401协议在信号处理实践中的策略,如发射端与接收端的处理方法,以及信号质量的检
【新手必学】:Protel 99se PCB设计,BOM导出从入门到精通
# 摘要
本文旨在详细介绍Protel 99se在PCB设计中的应用基础,深入探讨物料清单(BOM)与PCB设计的紧密关系及其导出流程。通过阐述BOM的作用、分类和在设计数据关联中的重要性,本文提供了PCB设计实践操作的指导,包括前期准备、原理图绘制、PCB布局生成以及BOM导出。同时,文章还讨论了BOM导出的高级技巧与优化,以及BOM在PC
【多相流仿真高级解析】:ANSYS CFX多相流模型的6大应用场景

# 摘要
多相流仿真在工程和科学领域中具有重要的应用价值,特别是在复杂的化工、生物反应器和矿物输送等场景。本文首先概述了多相流仿真及其重要性,并详细介绍了ANSYS CFX多相流模型的基础理论和设置方法。通过具体案例实践,如气液两相流、固液两相流和多组分混合过程的仿真,本文展示了多相流仿真的实际应用。此外,本文还探讨了高级应用,例如液滴与颗粒运动
医疗数据标准化实战:7中心系统接口数据结构深度解析

# 摘要
医疗数据标准化是提高医疗信息系统互操作性和数据质量的关键,本文深入探讨了医疗数据接口标准的理论基础、数据结构设计、实现技术及挑战对策。文章从接口标准的定义、
数据流图在业务流程改进中的7大作用与案例

# 摘要
数据流图
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )