MPU6050 的SPI通信协议解析
发布时间: 2024-04-11 07:01:38 阅读量: 357 订阅数: 75 

MPU6050资料
# 1. MPU6050 的SPI通信协议解析
## 1. 介绍
- 1.1 什么是 MPU6050
MPU6050 是一款常用的六轴运动处理芯片,集成了三轴加速度计和三轴陀螺仪。
- 1.2 SPI通信协议概述
SPI(Serial Peripheral Interface)是一种同步串行数据总线通信协议,常用于连接微控制器(MCU)和外围设备之间进行数据通信。
## 2. SPI接口详解
- 2.1 SPI通信原理
SPI通信由一个主设备(主控)和一个或多个从设备(外围设备)组成,通过四根线(SCK、MISO、MOSI、SS)进行通信。
- 2.2 MPU6050 的SPI接口引脚介绍
| 引脚 | 说明 |
|------|----------------|
| VCC | 供电正极 |
| GND | 地线 |
| SCL | 串行时钟线 |
| SDA | 串行数据线 |
| AD0 | 地址选择位 |
| INT | 中断输出 |
- 2.3 SPI通信时序要求
在SPI通信中,时钟极性和相位,数据位顺序等时序参数需与从设备要求的参数相匹配,以确保数据传输的正确性。
## 3. 寄存器映射及功能
- 3.1 MPU6050 寄存器结构
MPU6050内部包含多个寄存器,用于配置传感器采样范围、开启/关闭传感器等功能。
- 3.2 主要寄存器功能介绍
- 加速度计设置寄存器(ACCEL_CONFIG):用于配置加速度计的范围和抗干扰能力。
- 陀螺仪设置寄存器(GYRO_CONFIG):用于配置陀螺仪的量程和工作模式。
- 3.3 寄存器操作示例
```python
# 设置加速度计量程为±2g
bus.write_byte_data(address, ACCEL_CONFIG, 0x00)
# 配置陀螺仪量程为±250°/s
bus.write_byte_data(address, GYRO_CONFIG, 0x00)
```
以上是 MPU6050 的SPI通信协议解析的第一章节内容。接下来我们将继续探讨SPI通信流程。
# 2. SPI接口详解
- 2.1 SPI通信原理
- SPI(Serial Peripheral Interface)是一种同步的串行数据通信协议,用于在集成电路之间进行通信。
- SPI包含四根线,分别是时钟线(SCLK)、数据输入线(MOSI)、数据输出线(MISO)、片选线(SS)。
- 通信过程中,一个设备作为主设备发起通信,其他设备作为从设备响应。
- 2.2 MPU6050 的SPI接口引脚介绍
| 引脚名称 | 描述 |
| -------- | ------------ |
| VCC | 供电正极 |
| GND | 地 |
| SCL | 串行时钟输入 |
| SDA | 串行数据输入 |
| CS | 从机片选 |
- 2.3 SPI通信时序要求
- MPU6050的SPI通信波特率范围为1MHz-5MHz。
- 通信时序图如下:
```mermaid
sequenceDiagram
MainDevice->>SlaveDevice: 片选信号拉低
MainDevice->>SlaveDevice: 时钟信号传输
SlaveDevice->>MainDevice: 数据传输
```
# 3. 寄存器映射及功能
### 3.1 MPU6050 寄存器结构
MPU6050 的寄存器结构如下表所示:
| 寄存器地址 | 寄存器名称 | 功能描述 |
|------------|----------------|-------------------------|
| 0x6B | PWR_MGMT_1 | 电源管理寄存器1 |
| 0x19 | ACCEL_XOUT_H | 加速度传感器 X 轴高位 |
| 0x1A | ACCEL_XOUT_L | 加速度传感器 X 轴低位 |
| 0x1B | ACCEL_YOUT_H | 加速度传感器 Y 轴高位 |
| 0x1C | ACCEL_YOUT_L | 加速度传感器 Y 轴低位 |
| 0x1D | ACCEL_ZOUT_H | 加速度传感器 Z 轴高位 |
| 0x1E | ACCEL_ZOUT_L | 加速度传感器 Z 轴低位 |
| 0x43 | GYRO_XOUT_H | 陀螺仪 X 轴高位 |
| 0x44 | GYRO_XOUT_L | 陀螺仪 X 轴低位 |
| 0x45 | GYRO_YOUT_H | 陀螺仪 Y 轴高位 |
| 0x46 | GYRO_YOUT_L | 陀螺仪 Y 轴低位 |
| 0x47 | GYRO_ZOUT_H | 陀螺仪 Z 轴高位 |
| 0x48 | GYRO_ZOUT_L | 陀螺仪 Z 轴低位 |
### 3.2 主要寄存器功能介绍
- **PWR_MGMT_1**:用于控制 MPU6050 的电源管理,包括使能/禁用设备、选择时钟源等。
- **ACCEL_XOUT_H/L**:分别用于读取加速度传感器 X 轴的高位和低位数据。
- **ACCEL_YOUT_H/L**:分别用于读取加速度传感器 Y 轴的高位和低位数据。
- **ACCEL_ZOUT_H/L**:分别用于读取加速度传感器 Z 轴的高位和低位数据。
- **GYRO_XOUT_H/L**:分别用于读取陀螺仪 X 轴的高位和低位数据。
- **GYRO_YOUT_H/L**:分别用于读取陀螺仪 Y 轴的高位和低位数据。
- **GYRO_ZOUT_H/L**:分别用于读取陀螺仪 Z 轴的高位和低位数据。
### 3.3 寄存器操作示例
下面是一个示例代码片段,演示如何通过 SPI 接口读取 MPU6050 的加速度传感器 X 轴数据:
```python
import spidev
# 初始化 SPI 总线
spi = spidev.SpiDev()
spi.open(0, 0)
# 读取 ACCEL_XOUT_H 寄存器数据
reg = 0x3B # ACCEL_XOUT_H 寄存器地址
resp = spi.xfer2([reg, 0x00])
high_byte = resp[1]
# 读取 ACCEL_XOUT_L 寄存器数据
reg = 0x3C # ACCEL_XOUT_L 寄存器地址
resp = spi.xfer2([reg, 0x00])
low_byte = resp[1]
# 合并高低位数据
accel_x = (high_byte << 8) | low_byte
print("加速度传感器 X 轴数据为: {}".format(accel_x))
spi.close()
```
以上代码演示了如何使用 Python 通过 SPI 接口读取 MPU6050 的加速度传感器 X 轴数据。首先初始化 SPI 总线,然后分别读取 ACCEL_XOUT_H 和 ACCEL_XOUT_L 寄存器的数据,并将其合并为完整的加速度值。
# 4. SPI通信流程
在本章节中,我们将详细介绍如何通过 SPI 总线与 MPU6050 进行通信,包括初始化 SPI 总线、配置 MPU6050 寄存器以及数据传输流程。
### 4.1 初始化 SPI 总线
在 Arduino 上初始化 SPI 总线的代码示例如下:
```cpp
#include <SPI.h>
void setup() {
SPI.begin();
SPI.setClockDivider(SPI_CLOCK_DIV16); // 设置SPI通信速率
}
```
### 4.2 配置 MPU6050 寄存器
要配置 MPU6050 寄存器,首先需要通过 SPI 写入相应的配置数据。下表列出了一些常见的寄存器地址及其功能:
| 寄存器地址 | 功能 |
|------------|------------------|
| 0x6B | 电源管理寄存器 |
| 0x19 | 陀螺仪配置寄存器 |
| 0x1C | 加速度配置寄存器 |
### 4.3 数据传输流程
使用 SPI 通信协议与 MPU6050 进行数据传输的基本流程如下所示:
```mermaid
graph LR
A(初始化SPI总线) --> B(配置MPU6050寄存器)
B --> C(发送数据请求命令)
C --> D(读取传感器数据)
D --> E(数据处理及校准)
```
通过以上步骤,我们可以实现与 MPU6050 的数据通信,进而获取传感器的数据并进行后续处理。
# 5. MPU6050 数据采集
### 5.1 加速度传感数据采集
- 通过 MPU6050 的加速度传感器,我们可以获取物体在三轴方向上的加速度值。
- 下表展示了 MPU6050 加速度传感器数据寄存器的相关信息:
| 寄存器地址 | 寄存器名称 | 数据格式 | 功能说明 |
|------------|--------------|-----------|-------------|
| 0x3B | ACCEL_XOUT_H | 16位有符号整数 | X轴加速度数据的高位字节 |
| 0x3C | ACCEL_XOUT_L | 16位有符号整数 | X轴加速度数据的低位字节 |
| 0x3D | ACCEL_YOUT_H | 16位有符号整数 | Y轴加速度数据的高位字节 |
| 0x3E | ACCEL_YOUT_L | 16位有符号整数 | Y轴加速度数据的低位字节 |
| 0x3F | ACCEL_ZOUT_H | 16位有符号整数 | Z轴加速度数据的高位字节 |
| 0x40 | ACCEL_ZOUT_L | 16位有符号整数 | Z轴加速度数据的低位字节 |
- 下面是采集 MPU6050 加速度传感器数据的 Python 代码示例:
```python
import smbus
import time
bus = smbus.SMBus(1)
device_address = 0x68
def read_accel_data():
accel_data = []
for i in range(3):
high_byte = bus.read_byte_data(device_address, 0x3B + i*2)
low_byte = bus.read_byte_data(device_address, 0x3C + i*2)
value = (high_byte << 8) + low_byte
if value > 32767: # Convert to negative value if needed
value -= 65536
accel_data.append(value)
return accel_data
while True:
accel_values = read_accel_data()
print(f"X-Axis: {accel_values[0]}, Y-Axis: {accel_values[1]}, Z-Axis: {accel_values[2]}")
time.sleep(0.1)
```
- 代码解释:此代码通过 Python 读取 MPU6050 的加速度传感器数据,并打印在控制台上。通过循环获取 X、Y、Z轴的加速度值,并实时输出。
### 5.2 陀螺仪传感数据采集
- 通过 MPU6050 的陀螺仪传感器,我们可以获取物体在三轴方向上的角速度。
- 下表展示了 MPU6050 陀螺仪传感器数据寄存器的相关信息:
| 寄存器地址 | 寄存器名称 | 数据格式 | 功能说明 |
|------------|--------------|-----------|-------------|
| 0x43 | GYRO_XOUT_H | 16位有符号整数 | X轴角速度数据的高位字节 |
| 0x44 | GYRO_XOUT_L | 16位有符号整数 | X轴角速度数据的低位字节 |
| 0x45 | GYRO_YOUT_H | 16位有符号整数 | Y轴角速度数据的高位字节 |
| 0x46 | GYRO_YOUT_L | 16位有符号整数 | Y轴角速度数据的低位字节 |
| 0x47 | GYRO_ZOUT_H | 16位有符号整数 | Z轴角速度数据的高位字节 |
| 0x48 | GYRO_ZOUT_L | 16位有符号整数 | Z轴角速度数据的低位字节 |
- 下面是采集 MPU6050 陀螺仪传感器数据的 Python 代码示例:
```python
import smbus
import time
bus = smbus.SMBus(1)
device_address = 0x68
def read_gyro_data():
gyro_data = []
for i in range(3):
high_byte = bus.read_byte_data(device_address, 0x43 + i*2)
low_byte = bus.read_byte_data(device_address, 0x44 + i*2)
value = (high_byte << 8) + low_byte
if value > 32767: # Convert to negative value if needed
value -= 65536
gyro_data.append(value)
return gyro_data
while True:
gyro_values = read_gyro_data()
print(f"X-Axis: {gyro_values[0]}, Y-Axis: {gyro_values[1]}, Z-Axis: {gyro_values[2]}")
time.sleep(0.1)
```
- 代码解释:此代码通过 Python 读取 MPU6050 的陀螺仪传感器数据,并打印在控制台上。通过循环获取 X、Y、Z轴的角速度值,并实时输出。
# 6. 实际应用案例
### 6.1 将 MPU6050 结合 Arduino 进行姿态检测
- 使用 Arduino 开发板连接 MPU6050,并编写程序实现姿态检测功能。
- 程序通过读取 MPU6050 的加速度和陀螺仪数据,计算出设备的倾斜角度。
- 以下是 Arduino 代码示例:
```cpp
#include <Wire.h>
#include <MPU6050.h>
MPU6050 mpu;
void setup() {
Serial.begin(9600);
mpu.initialize();
}
void loop() {
int16_t ax, ay, az, gx, gy, gz;
mpu.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);
float accAngleX = atan(-ay / sqrt(ax * ax + az * az)) * RAD_TO_DEG;
float accAngleY = atan(ax / sqrt(ay * ay + az * az)) * RAD_TO_DEG;
float gyroAngleX = gx / 131.0;
float gyroAngleY = gy / 131.0;
// Combine accelerometer and gyroscope data to get final angles
delay(100); // Update rate can be adjusted as needed
}
```
### 6.2 使用SPI通信协议与 MPU6050 进行数据传输
- 通过 SPI 通信协议将 Arduino 与 MPU6050 连接,实现数据的传输与交互。
- 配置 Arduino 的 SPI 接口参数,设置 MPU6050 的寄存器以进行数据读写操作。
- 下表列出了 MPU6050 的一些寄存器及其功能:
| 寄存器地址 | 寄存器名称 | 功能描述 |
|------------|------------|-------------------------|
| 0x6B | PWR_MGMT_1 | 电源管理寄存器1 |
| 0x3B-0x40 | ACCEL_XOUT | 加速度传感器 X/Y/Z 数据 |
| 0x43-0x48 | GYRO_XOUT | 陀螺仪 X/Y/Z 数据 |
- SPI 数据传输流程如下 Mermaid 流程图所示:
```mermaid
graph LR
A(Arduino) -->|发起数据传输请求| B(MPU6050)
B -->|返回数据| A
```
通过以上实际案例,我们可以看到如何通过 Arduino 和 MPU6050 实现姿态检测功能,并利用 SPI 通信协议进行数据传输。
# 7. 总结与展望
### 7.1 总结本文内容
在本文中,我们详细介绍了 MPU6050 的 SPI 通信协议解析,涵盖了从介绍 MPU6050 和 SPI 通信原理,到实际应用案例的全面内容。
总结本文的重点内容:
- 介绍了 MPU6050 和 SPI通信协议的基本原理和特点;
- 解析了 MPU6050 的 SPI 接口引脚,以及通信时序要求;
- 分析了 MPU6050 寄存器结构和功能,以及寄存器的操作示例;
- 描述了 SPI 通信流程,包括初始化 SPI 总线、配置 MPU6050 寄存器和数据传输流程;
- 详细说明了 MPU6050 数据采集过程,包括加速度传感数据采集、陀螺仪传感数据采集和数据处理及校准的方法;
- 展示了实际应用案例,将 MPU6050 结合 Arduino 进行姿态检测,并使用 SPI 通信协议与 MPU6050 进行数据传输;
- 最后,对 MPU6050 在 SPI通信领域的发展进行了展望,指出了未来的研究方向和应用场景。
### 7.2 展望未来 MPU6050 在SPI通信领域的发展
未来随着物联网技术的不断发展和智能设备的普及,MPU6050 在 SPI 通信领域的应用将会更加广泛。下面是一些可能的发展方向:
- 针对 MPU6050 数据采集精度和速度的进一步优化,提高数据处理效率;
- 结合深度学习和人工智能技术,实现对 MPU6050 数据的智能分析和应用;
- 开发更加便捷、高效的 SPI 通信库,简化 MPU6050 与其他硬件设备的接口开发;
- 探索 MPU6050 在虚拟现实和增强现实等领域的应用,实现更加沉浸式的用户体验。
### 7.3 感谢致辞
在本文撰写过程中,我们深入研究了 MPU6050 的 SPI 通信协议,感谢各位读者的关注和支持。如果您有任何问题或建议,欢迎在评论区留言交流。感谢您的耐心阅读!

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
专栏“mpu6050”深入探讨了 mpu6050 传感器的原理、通信协议、工作原理、算法、技术和应用。它涵盖了 mpu6050 中陀螺仪和加速计的工作原理,姿态解算和运动融合算法,滤波技术,数据校准和传输,实时数据处理和显示,中断处理,以及与 Arduino、Raspberry Pi 和 STM32 微控制器的驱动和应用。专栏还展示了 mpu6050 在四轴飞行器、平衡车、虚拟现实头显、运动传感器和人机交互设备中的实际应用。通过深入的分析和丰富的示例,本专栏为读者提供了全面的指南,帮助他们了解和使用 mpu6050 传感器。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【深入探讨PLC指令集】:四节传送带案例的逻辑解析
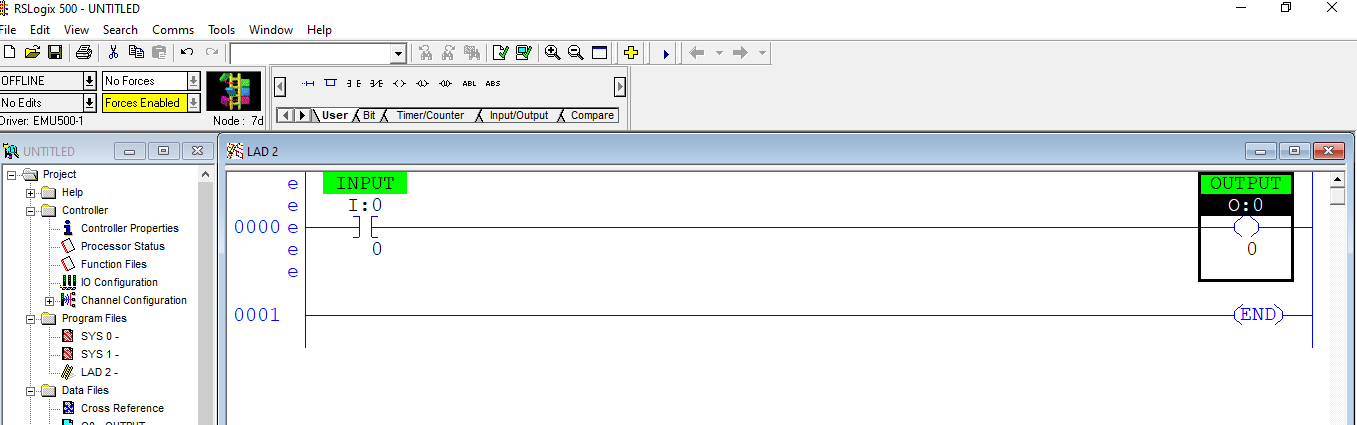
# 摘要
本文详细介绍了PLC指令集的基础与高级应用,重点分析了基础逻辑指令和高级指令在四节传送带控制案例中的具体运用。通过对输入/输出、定时器、计数器等基础逻辑指令的讨论,阐述了传送带启动与停止的逻辑编程。文章进一步探讨了数据处理、速度控制及故障诊断方面的高级指令使用,并通过案例实践,展示了同步控制逻辑、应急停止设计以及系统整体测试与优化的方法。本文为自动化系统的设计和PLC编程提供了实用的参考。
# 关键字
PLC指令
【STM32G030F6P6秘籍】:5个技巧助你精通性能优化与电源管理
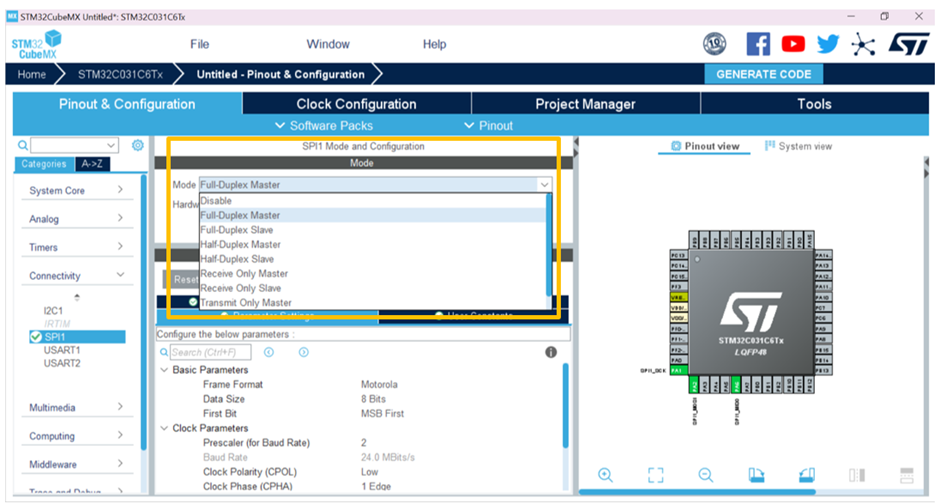
# 摘要
本文全面探讨了STM32G030F6P6微控制器的性能优化与电源管理策略。首先介绍STM32G030F6P6的基本特性及开发环境搭建,随后深入到性能优化的基础知识,包括硬件特性理解、理论基础和初步实践。文章着重于代码级和系统级性能优化技巧,并讨论特殊功能单元如定时器和中断管理的优化策略。此外,详细探讨了电源管理的理论基础与优化实践,包括电源模
【哨兵1号数据仓库设计指南】:构建坚如磐石的数据存储架构
# 摘要
数据仓库作为支持企业决策分析的重要技术架构,在数据整合、存储和分析方面发挥着关键作用。本文首先介绍了数据仓库的基本概念和架构,随后深入探讨了其设计理论,包括设计原则、方法和数据质量控制。通过分析哨兵1号数据仓库的实践应用,本文对需求分析、系统设计和实现进行了详细阐述。紧接着,文章重点讨论了性能优化策略,涵盖查询优化、数据压缩和存储优化以及系统层面的优化
Maven仓库安全指南:7个步骤保护你的代码构件安全无忧
# 摘要
Maven作为Java项目管理和构建自动化工具,其仓库安全对整个软件开发环境至关重要。本文首先介绍了Maven仓库安全的基础知识,然后详细探讨了权限和认证机制的设计与实施,包括权限控制的理论基础及配置方法、认证机制的理论与实践操作,以及安全实践应用中的案例分析和问题解决方案。接下来,文章深入分析了Maven
驱动显示性能革命:3840x2400分辨率显示屏效果提升策略

# 摘要
随着高分辨率显示屏技术的不断进步,对显示性能的要求也愈发严格。本文探讨了高分辨率显示屏的技术背景及其影响,从硬件优化、软件调优等多方面分析了提高显示性能的策略和理论框架。通过对GPU性能提升、显存使用效率优化、显示接口技术配合的硬件策略,以及显示驱动程序和操作系统的调优进行深入研究,本文提供了具体的优化方法和实践案例。最后,文章展望了未来显示技术的发展趋势,预测了高分辨率显示屏将如何
【电力系统数据建模】:IEC61850数据结构的灵活性构建
# 摘要
IEC61850标准是电力自动化领域中用于数据通信和设备互操作性的重要标准。本文首先概述了IEC61850标准及其数据模型的基础知识,详细解析了数据结构和信息模型的理论基础以及IEC61850数据模型的灵活性。接着,实践解析部分讨论了IEC61850数据结构的具体实现,包括SCL描述语言的应用,数据通信服务映射,以及数据结构的配置与管理。文章进一步探讨了IEC61850数据结构在智能电网等高级应用中的表现,包括设备集成、互操作性以及数据安全与隐私保护的挑战。最后,本文展望了IEC61850数据结构的未来发展趋势,探讨了新兴技术对标准的影响和新应用场景中的部署案例。
# 关键字
IE
【FFTW与现代编程】:集成与优化策略,打造科学计算平台

# 摘要
FFTW(快速傅里叶变换库)是科学计算领域广泛使用的高性能计算库,特别在复杂算法执行速度和准确性方面占有重要地位。本文从FFTW的理论基础出发,深入探讨了其关键技术和集成配置方法。详细分析了库的算法原理、数据结构、内存管理、多线程和并行计算等方面的优化策略。同时,提供了基于FFTW的科学计算
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )