YOLO目标检测算法在交通领域的应用:智能交通系统的关键技术,实现交通管理现代化
发布时间: 2024-08-15 12:39:38 阅读量: 96 订阅数: 33 

yolo-使用darknet+opencv+qt5实现的yolo目标检测算法
# 1. YOLO目标检测算法简介**
YOLO(You Only Look Once)是一种单阶段目标检测算法,它通过一次神经网络推理即可预测图像中所有对象的边界框和类别。与传统的双阶段目标检测算法(如R-CNN)不同,YOLO算法无需生成候选区域,而是将目标检测问题直接转化为回归问题,极大地提高了检测速度。
YOLO算法采用卷积神经网络作为特征提取器,将输入图像转换为特征图。然后,它使用一个全连接层预测每个网格单元中对象的边界框和类别概率。通过这种方式,YOLO算法可以在一次前向传播中检测图像中的所有对象,实现实时目标检测。
# 2. YOLO目标检测算法在交通领域的应用
### 2.1 交通场景下的目标检测需求
交通场景下目标检测的需求主要集中在以下三个方面:
#### 2.1.1 车辆检测
车辆检测是交通场景中最基础和重要的目标检测任务。它可以为交通流量监测、交通违法行为识别、交通事故预警等应用提供基础数据。
#### 2.1.2 行人检测
行人检测对于保障行人安全至关重要。它可以用于行人横道检测、行人闯红灯检测、行人轨迹跟踪等应用。
#### 2.1.3 交通标志检测
交通标志检测可以辅助驾驶员识别道路信息,提高交通安全。它可以用于交通标志识别、交通标志分类、交通标志定位等应用。
### 2.2 YOLO算法在交通领域的优势
YOLO算法在交通领域应用具有以下优势:
#### 2.2.1 实时性高
YOLO算法采用单次卷积神经网络,可以实现实时目标检测。这对于交通场景中瞬息万变的情况非常重要。
#### 2.2.2 精度较高
YOLO算法在目标检测任务上具有较高的精度。它可以准确地识别和定位交通场景中的目标,为后续应用提供可靠的数据。
#### 2.2.3 鲁棒性强
YOLO算法对光照、遮挡、姿态等因素具有较强的鲁棒性。这使得它可以在各种复杂的交通场景中稳定地工作。
### 2.3 YOLO算法在交通领域的应用案例
#### 2.3.1 交通流量监测
YOLO算法可以用于实时监测交通流量。通过检测和统计道路上的车辆数量,可以了解交通流量变化情况,为交通管理和规划提供依据。
#### 2.3.2 交通违法行为识别
YOLO算法可以用于识别交通违法行为,如闯红灯、超速行驶、违规停车等。通过对违法行为进行实时监测和处罚,可以有效减少交通事故的发生。
#### 2.3.3 交通事故预警
YOLO算法可以用于检测交通事故。通过对道路上的异常情况进行实时监测,可以及时发现交通事故的发生,并发出预警信号,为救援人员提供及时响应。
### 2.4 YOLO算法在交通领域的优化策略
为了进一步提高YOLO算法在交通领域的应用效果,可以采用以下优化策略:
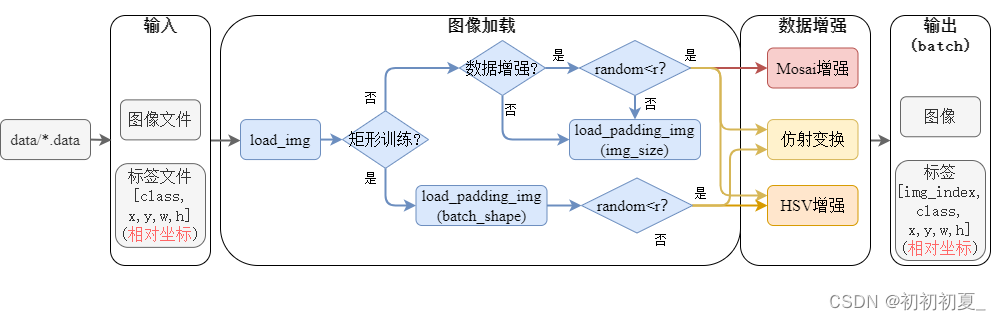
#### 2.4.1 数据增强
通过对交通场景数据进行旋转、翻转、裁剪等操作,可以扩充数据集,提高模型的泛化能力。
#### 2.4.2 模型微调
针对交通场景的特点,可以对YOLO算法的预训练模型进行微调,以提高模型在交通目标检测任务上的精度。
#### 2.4.3 超参数优化
通过优化YOLO算法的超参数,如学习率、训练轮数、正负样本比例等,可以提高模型的训练效率和检测性能。
#### 2.4.4 硬件加速
利用GPU或TPU等硬件加速器,可以大幅提升YOLO算法的推理速度,满足实时目标检测的需求。
# 3. YOLO目标检测算法在交通领域的实践
### 3.1 交通场景下的数据采集和标注
**3.1.1 数据采集方法**
交通场景下的数据采集主要包括车辆、行人、交通标志等目标的图像和视频数据。常用的数据采集方法有:
- **视频监控摄像头:**交通路口、道路沿线等位置安装的摄像头可以采集实时交通场景图像和视频。
- **移动设备:**智能手机、行车记录仪等移动设备可以采集行车过程中的图像和视频,用于补充固定摄像头的不足。
- **无人机:**无人机可以从空中采集大范围的交通场景图像和视频,适用于交通拥堵监测和事故调查等场景。
**3.1.2 数据标注工具**
数据标注是将采集到的图像或视频中的目标进行标记,为模型训练提供训练样本。常用的数据标注工具包括:
- **LabelImg:**一款开源的图像标注工具,支持矩形、多边形、关键点等标注类型。
- **VGG Image Annotator:**一个基于网页的图像标注工具,提供丰富的标注功能和标签管理。
- **CVAT:**一款开源的视频标注工具,支持视频帧的标注和跟踪。
### 3.2 YOLO算法的训练和优化
**3.2.1 训练参数设置**
YOLO算法的训练参数包括:
- **学习率:**控制模型更新幅度的参数,通常设置为0.001或更小。
- **批次大小:**一次训练的样本数量,通常设置为32或64。
- **训练轮数:**模型训练的次数,通常设置为100或更多。
- **权重衰减:**防止模型过拟合的正则化参数,通常设置为0.0005。
**3.2.2 模型优化策略**
为了提高YOLO算法在交通场景下的性能,可以采用以下优化策略:
- **数据增强:**对训练数据进行旋转、翻转、缩放等变换,增加模型的鲁棒性。
- **预训练权重:**使用在ImageNet等通用数据集上预训练的权重,加快模型收敛速度。
- **超参数调整:**通过网格搜索或贝叶斯优化等方法,找到最优的训练参数组合。
- **模型剪枝:**移除模型中不重要的层或权重,减小模型大小和计算量。
### 3.3 交通场景下的模型评估和部署
**3.3.1 模型评估指标**
评估YOLO算法在交通场景下的性能,常用的指标包括:
- **平均精度(mAP):**衡量模型在不同目标类别上的平均检测精度。
- **召回率:**衡量模型检测出所有目标的能力。
- **误检率:**衡量模型将非目标错误检测为目标的能力。
**3.3.2 模型部署方式**
YOLO算法的模型部署方式有:
- **CPU部署:**在CPU上运行模型,适用于实时性要求不高的场景。
- **GPU部署:**在GPU上运行模型,可以大幅提升模型推理速度。
- **边缘部署:**将模型部署在边缘设备上,如行车记录仪或交通监控摄像头,实现本地化处理。
# 4. YOLO目标检测算法在智能交通系统中的应用
### 4.1 交通流量监测和分析
#### 4.1.1 实时交通流量统计
YOLO目标检测算法可用于实时统计交通流量。通过在交通路口或道路上部署摄像头,并利用YOLO算法对摄像头采集的图像进行目标检测,可以识别和计数经过的车辆、行人和其他交通参与者。
```python
import cv2
import numpy as np
# 初始化YOLOv5模型
model = cv2.dnn.readNetFromDarknet("yolov5s.cfg", "yolov5s.weights")
# 设置输入图像尺寸
input_width = 640
input_height = 640
# 循环处理视频流
cap = cv2.VideoCapture("traffic.mp4")
while True:
ret, frame = cap.read()
if not
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
欢迎来到基于 YOLO 的目标检测专栏!本专栏涵盖了从 YOLOv1 到 YOLOv5 的所有 YOLO 算法版本,提供从小白到大神的一站式学习指南。通过深入剖析网络结构、训练策略和常见问题,您将全面掌握 YOLO 算法的精髓。此外,本专栏还探讨了 YOLO 在安防、交通、医疗、工业、零售、金融、农业、教育、娱乐、军事和科学研究等领域的应用,并提供实战案例和部署指南。无论您是希望提升算法性能、探索新应用场景,还是寻找最优开源框架,本专栏都能为您提供全方位的支持。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
H3C交换机SSH配置安全宝典:加密与认证的实战技巧
# 摘要
本文旨在详细探讨SSH协议在H3C交换机上的应用和管理,包括SSH的基本配置、安全性能提升、故障排除以及性能优化等关键方面。文章首先介绍了SSH协议的基础知识和H3C交换机的相关概述,随后深入讨论了SSH服务的启用、用户认证配置以及密钥管理等基本配置方法。接着,文中分析了如何通过认证方式的深度设置、端口转发和X11转
电路设计与NVIC库函数:提升嵌入式系统响应速度的关键技巧
# 摘要
本文深入探讨了嵌入式系统中NVIC库函数的角色及其对系统响应速度的影响。通过对NVIC基本功能、中断优先级管理、以及在电路设计中应用的分析,本文阐述了中断响应机制的优化和实时性、确定性的重要性。在电路设计的考量中,重点讨论了中断设计原则、系统时钟协同优化以及PCB布局对中断响应的影响。通过实践案例分析,探讨了NVIC在提升嵌入式系统响应速度中的应用和故障排除策略。
【编程高手必备】:掌握EMAC接口编程,精通AT91SAM7X256_128+网络开发
# 摘要
本论文对EMAC接口编程进行了全面的探讨,包括基础知识点、AT91SAM7X256/128+硬件平台上的初始化与配置、实战技巧、以及在特定网络开发项目中的应用。文章首先介绍了EMAC接口的基础知识,然后深入到AT91SAM7X256/128+微控制器的硬件架构解析,以及EMAC接口初始化的详细过程。第
【时间序列预测基础】:SPSS 19.00带你掌握趋势分析的秘密

# 摘要
时间序列预测在经济学、气象学、金融学等多个领域具有重要的应用价值。本文首先介绍了时间序列预测的基础概念,包括其重要性和应用范围。随后,文章详细阐述了使用SPSS 19.00软件进行时间序列数据的导入、基本分析和异常值处理。本研究深入探讨了时间序列预测模型的构建,包括线性趋势模型、ARIMA模型和季节性预测模型的理论基础、参数选择和优化。在此基础上,进一步探讨了S
用户体验提升秘籍:Qt平滑拖拽效果实现与优化

# 摘要
本论文详细探讨了在Qt框架下实现平滑拖拽效果的理论基础与实践方法。首先介绍了平滑动画的数学原理和Qt的事件处理机制,随后分析了设计模式在优化拖拽效果中的作用。第三章重点讲解了如何通过鼠标事件处理和关键代码实现流畅
【GAMIT批处理揭秘】:掌握10大高级技巧,自动化工作流程优化
# 摘要
本文全面介绍了GAMIT批处理的应用与技术细节,从基础知识到高级技巧,再到实际应用和未来趋势,提供了一套完整的GAM
死锁机制解析:四川大学试题回顾,终结死锁的四大策略!
# 摘要
死锁是多任务操作系统中的一种现象,其中多个进程因相互竞争资源而无限期地阻塞。本文对死锁机制进行了详细解析,从死锁的定义和产生条件开始,深入探讨了死锁的基本概念和条件。通过分析银行家算法和资源分配图等理论模型,文章进一步阐述了预防和避免死锁的策略,包括资源的有序分配和非抢占资源分配策略。最后,本文提出了死锁的检测和恢复方法,并通过实例展示了如何综合运用多种
Linux服务器网络性能提升:10个解决方案深入分析

# 摘要
Linux服务器网络性能优化是确保高性能服务交付的关键,涉及理论基础、硬件升级、服务配置及监控和故障排查等多个方面。本文首先概述了Linux服务器网络性能的基本概念,然后深入探讨网络性能优化的基础理论,包括网络协议栈的作用、关键性能指标、内核参数调整以及网络接口的配置与管理
温度控制的艺术:欧姆龙E5CZ在工业过程中的最佳应用案例
# 摘要
本论文旨在介绍欧姆龙E5CZ控制器在温度控制领域的应用及其特性优势,并分析其在工业过程中的实际操作案例。通过温度控制理论基础的探讨,包括系统组成、基本原理、控制策略、传感器技术,本研究展示了如何选择和优化温度控制策略,并实现对温度的精确控制。同时,本论文还探讨了温度控制系统的优化方法和故障排除策略,以及工业4.0和新兴技术对温度控制未来发展的影响,提出了一系列创新性的建议和展望,以期为相关领域的研究和实践提供参考。
# 关键字
欧姆龙E5CZ控制器;温度控制;PID理论;传感器校准;系统优化;工业4.0;人工智能;无线传感网络
参考资源链接:[欧姆龙E5CZ温控表:薄型78mm,
封装设计进阶之路:从基础到高级的Cadence 16.2教程
# 摘要
封装设计是集成电路制造的重要环节,本文首先概述了封装设计的基本概念,并介绍了Cadence工具的基础知识和操作。随后,详细阐述了基础及高级封装设计的实现流程,包括不同封装类型的应用、设计原则、Cadence操作细节、以及实践案例分析。文章还探讨了封装设计中的电气特性、热管理及可靠性测试,并提出了相应的分析和优化策略。此外,本
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )