【SJA1000与CAN协议深度解析】:揭秘协议背后的秘密
发布时间: 2025-01-04 00:34:39 阅读量: 6 订阅数: 9 

# 摘要
本文对SJA1000控制器及其与CAN协议的关系进行了全面介绍。首先概述了SJA1000与CAN协议的基础知识,接着深入分析了SJA1000的内部架构、工作机制以及通信机制。文章还探讨了CAN协议的核心概念、数据传输机制和错误管理等技术细节。在此基础上,本文提供了SJA1000与CAN协议在实际应用中的案例分析,并介绍了集成SJA1000到嵌入式系统的策略。最后,文章展望了CAN FD协议的发展,探讨了在CAN协议中应用安全机制,并对未来技术趋势进行预测。通过这些内容,本文旨在为开发者提供深入理解与应用SJA1000和CAN协议的实践指南。
# 关键字
SJA1000控制器;CAN协议;通信机制;数据传输;错误管理;嵌入式系统集成
参考资源链接:[SJA1000 CAN控制器初始化与收发程序详解](https://wenku.csdn.net/doc/6412b56abe7fbd1778d4311e?spm=1055.2635.3001.10343)
# 1. SJA1000与CAN协议概述
在现代工业通信网络中,控制器局域网络(CAN)协议已成为设备间通信的标准之一,特别是应用于汽车和工业自动化领域。SJA1000是Philips半导体公司(现NXP)推出的一款独立CAN控制器,广泛应用于嵌入式系统中,为设备间的高效可靠通信提供了可能。
CAN协议最初被设计为一种消息优先级管理的总线系统,允许多个节点同时访问共享介质而不会产生冲突。SJA1000控制器则在这一通信协议的基础上,提供了必要的硬件支持,确保数据包的准确传送。
在深入探讨SJA1000控制器的内部架构与工作机制之前,本章节旨在为读者提供关于SJA1000与CAN协议的基础概念、发展历程以及两者之间的关系。理解这些基础知识,是进一步学习如何设计和优化基于SJA1000的CAN网络的前提。
接下来的章节,我们将逐步展开介绍SJA1000的硬件结构、工作模式和通信机制,以及CAN协议的核心概念和技术细节,最终通过实践应用案例来展示如何将这些知识应用于实际项目中。
# 2. SJA1000控制器的内部架构与工作机制
SJA1000是Philips(现NXP)公司生产的经典CAN控制器,广泛应用于汽车和工业领域。它提供了CAN协议的物理层和数据链路层功能,与微处理器进行数据交换。
## 2.1 SJA1000控制器的硬件结构
### 2.1.1 主要组成模块介绍
SJA1000主要由四个核心模块构成:接收缓冲器(Receive Buffer)、发送缓冲器(Transmit Buffer)、消息对象管理器(Message Object Manager)以及位流处理器(Bit Stream Processor)。
- **接收缓冲器**负责临时存储接收到的消息数据,并提供给微处理器处理。
- **发送缓冲器**用于缓存微处理器准备发送的数据。
- **消息对象管理器**是负责消息过滤和控制消息对象的地方,通过配置不同的消息对象来实现对特定数据的接收或发送。
- **位流处理器**则是负责处理CAN总线上的物理位流,比如位时序、同步和错误检测等。
### 2.1.2 模块间的交互机制
SJA1000内部模块之间的交互机制保证了数据的正确收发。例如,当一个消息对象在消息对象管理器中配置为接收特定标识符的数据时,一旦该数据通过CAN总线传输,位流处理器会识别并同步数据流,然后将该数据存储到接收缓冲器中,最后微处理器可通过读取接收缓冲器来获取数据。
## 2.2 SJA1000的工作模式与配置
### 2.2.1 标准模式与扩展模式的区别
SJA1000控制器有两种工作模式:标准模式和扩展模式,它们主要的区别在于消息的标识符长度不同。
- **标准模式**的标识符长度为11位,符合CAN2.0A标准。
- **扩展模式**支持29位的标识符,符合CAN2.0B标准。
在标准模式下,控制器能够接收和发送标准标识符的消息;而在扩展模式下,则能接收和发送扩展标识符的消息,提供更大的消息识别范围。
### 2.2.2 配置寄存器的作用与设置方法
配置寄存器是SJA1000控制器设置其工作参数的关键。通过配置寄存器,用户可以设置波特率、工作模式、中断使能等重要参数。
例如,`OCR`(输出控制寄存器)控制着SJA1000的输出驱动器工作状态,而`ACR`(验收代码寄存器)和`AMR`(验收掩码寄存器)则用于配置消息过滤规则。设置时,用户首先需要将寄存器的相关位写入相应的值,通过编程接口来改变控制器的行为。
```c
// 示例代码:配置SJA1000的波特率
// 该代码仅为逻辑示意,具体实现需参考SJA1000的编程手册
// 假设波特率寄存器的地址是0x20
uint8_t brp_value = calculate_baudrate_value(desired_baudrate);
sja1000_write_register(0x20, brp_value);
// 计算波特率值的函数示例(伪代码)
uint8_t calculate_baudrate_value(uint32_t desired_baudrate) {
// 根据SJA1000的时钟频率和所需波特率计算BRP值
// ...
return computed_baudrate_register_value;
}
void sja1000_write_register(uint8_t reg_address, uint8_t value) {
// 发送寄存器地址和值到SJA1000,具体实现依赖于硬件连接和通信协议
// ...
}
```
## 2.3 SJA1000的通信机制
### 2.3.1 CAN协议帧格式解析
CAN协议帧由六个部分组成:帧起始、仲裁段、控制段、数据段、CRC段和帧结束。SJA1000负责实现这些帧段在物理层和数据链路层的打包与解包。
- **帧起始**标志着帧的开始。
- **仲裁段**用于决定哪个节点有权访问总线。
- **控制段**包含标识符、数据长度代码和其它控制信息。
- **数据段**承载了0到8字节的有效载荷数据。
- **CRC段**包含循环冗余检验码,用于错误检测。
- **帧结束**标志着帧的结束。
### 2.3.2 错误检测与处理机制
错误检测是确保CAN总线通信可靠性的关键。SJA1000通过以下方式进行错误检测:
- **位填充**:CAN协议要求帧中的位数量必须为整数个字节。为了避免位填充错误,发送方会在发送连续五个相同位后自动插入一个补充位(反向)。接收方则移除这些补充位。
- **CRC校验**:使用CRC校验序列确保数据的完整性。
- **消息确认**:发送节点在发送消息后监听网络,若未收到自己的消息确认,则视为发送失败。
- **主动错误标志和被动错误标志**:任何检测到错误的节点将发送主动错误标志,而未检测到错误的节点则发送被动错

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0

专栏简介
欢迎来到 SJA1000 CAN 控制器专栏!本专栏旨在为新手和经验丰富的工程师提供全面的指南,帮助他们了解、初始化和使用 SJA1000。从基本角色和关键功能到高级时钟同步和缓存管理,我们涵盖了所有内容。
我们将深入探讨消息传递、硬件接口、中断处理和软件过滤,确保您构建稳定可靠的 CAN 总线系统。无论您是开发车载网络、嵌入式系统还是 RTOS 应用程序,本专栏都将为您提供所需的信息和技巧,以充分利用 SJA1000 的强大功能。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【数据处理脚本应用】:音麦脚本在数据采集与处理中的高效运用(专业技巧)

# 摘要
音麦脚本作为数据采集与处理的有效工具,通过其灵活性和强大的脚本功能,在数据科学和工程领域中扮演着重要角色。本文首先介绍了音麦脚本的基本概念及其在数据采集中的关键作用,随后详细探讨了音麦脚本的配置、数据采集策略、数据库交互以及高效的数据处理方法。文章通过实战演练部分,提供了音麦脚本在金融和市场调研等特定行业中的应用案例,并对性能优化与故障排除技巧进行了阐述。最后,本文展望了音麦脚本的未来发展趋势,包括技
【PDN直流压降与EMC】:电磁兼容性的关键因素分析

# 摘要
随着电子系统性能要求的提高,电源分配网络(PDN)的直流压降问题对电磁兼容性(EMC)及信号完整性的影响日益显著。本文首先介绍了PDN直流压降的基础
移动应用开发指南:跨平台解决方案,iOS到Android全攻略

# 摘要
本文综合探讨了移动应用开发的多个方面,从理论基础到实战演练,再到平台特定的知识和跨平台集成,以及案例研究和最佳实践的应用。在第二章中,系统分析了跨平台移动应用开发的理论,对比了不同框架,并讨论了原生与跨平台开发的优劣。第三章通过实战演练的方式,指导选择合适的框架、设计用户界面以及优化应用性能。第四章专注于iOS与Android的
Java虚拟机(JVM)调优秘籍:面试加分项全解析
# 摘要
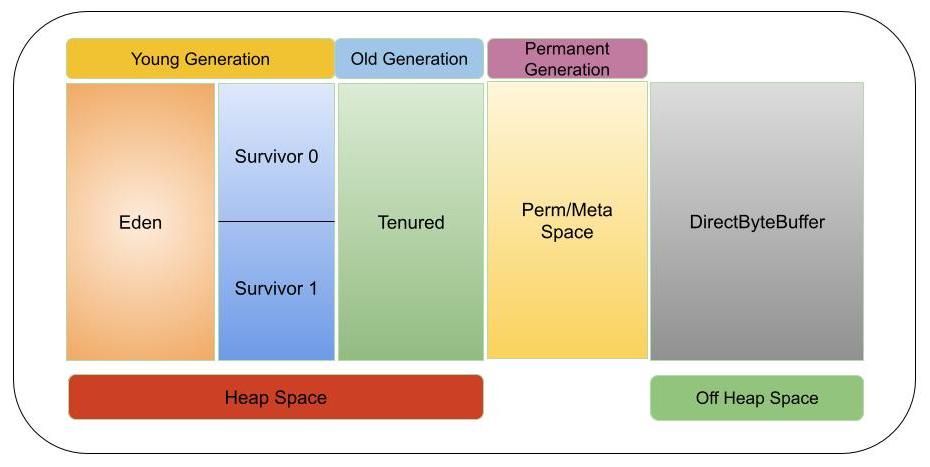
本文深入探讨了Java虚拟机(JVM)的工作原理和内存模型,详细分析了JVM在内存管理、垃圾收集机制、性能调优方面的关键技术和策略。通过对JVM内存结构和分配策略的深度剖析,特别是针对Java堆内存和非堆内存区域的管理和GC回收机制,以及内存泄漏和内存溢出问题的识别与解决,本文旨在提供全面的JVM调优解
【CST粒子工作室:仿真之旅启动篇】
# 摘要
CST粒子工作室是集成了先进电磁仿真技术的软件工具,它基于电磁场理论和粒子动力学原理,支持数值计算方法,为科学家和工程师提供了一个强大的仿真平台。本文旨在介绍CST粒子工作室的核心理论基础、功能实践操作和高级仿真技巧。通过详细描述其界面布局、粒子源配置、电磁仿真模型构建等基本操作,同时深入探讨仿真参数的精细化设置、复杂系统仿真的优化策略以及实际案例分析,本文为读者提供了完整的技术指南。最后,文章展望了CST粒子工作室的未来发展方向,包括新技术融合、社区建设与用户支持等,致力于推动仿真技术的创新和普及。
# 关键字
CST粒子工作室;电磁场理论;粒子动力学;数值计算;仿真优化;跨学科
MELSEC iQ-F FX5编程进阶指南:彻底理解指令逻辑,提升编程智慧

# 摘要
MELSEC iQ-F FX5作为一款先进的可编程逻辑控制器(PLC),在自动化领域具有广泛的应用。本文首先介绍MELSEC iQ-F FX5的基
【编写高效算法】:NumPy自定义函数的黄金技巧

# 摘要
本文系统地介绍了NumPy自定义函数的设计、实现和优化策略。从基础的NumPy数组操作开始,深入探讨了函数对象、作用域规则、高阶函数、闭包以及装饰器模式的理论基础。接着,通过实战技巧部分,本研究展示了如何利用向量化操作加速计算,优化内存使用,并编写可重用代码。进阶应用章节则涵盖了并行计算、多线程、与Pandas的结合使用以及编写可测试的函数。最后,案例分析与最佳实践章节通过实际案例分析和编程风格讨论,提供了将
Firefox内存消耗不再成问题:权威监控与优化技巧

# 摘要
本文主要探讨了Firefox浏览器在内存管理方面的机制、消耗理论以及优化实践。文章首先概述了Firefox的内存管理框架,接着分析了操作系统内存管理、浏览器内存消耗类型和Firefox特有的内存管理特点。通过详细讨论内存监控工具的使用和内存问题的分析诊断方法,文章深入阐述了内存优化的具体实践,包括浏览器和插件使用优化,以及高级技巧和系统级别的内存优化配置。最后,通过案例研究,本文展示了解决真实世界中内存问题的策略,
MATLAB非线性规划求解器深度解析:提升解的稳定性与性能
# 摘要
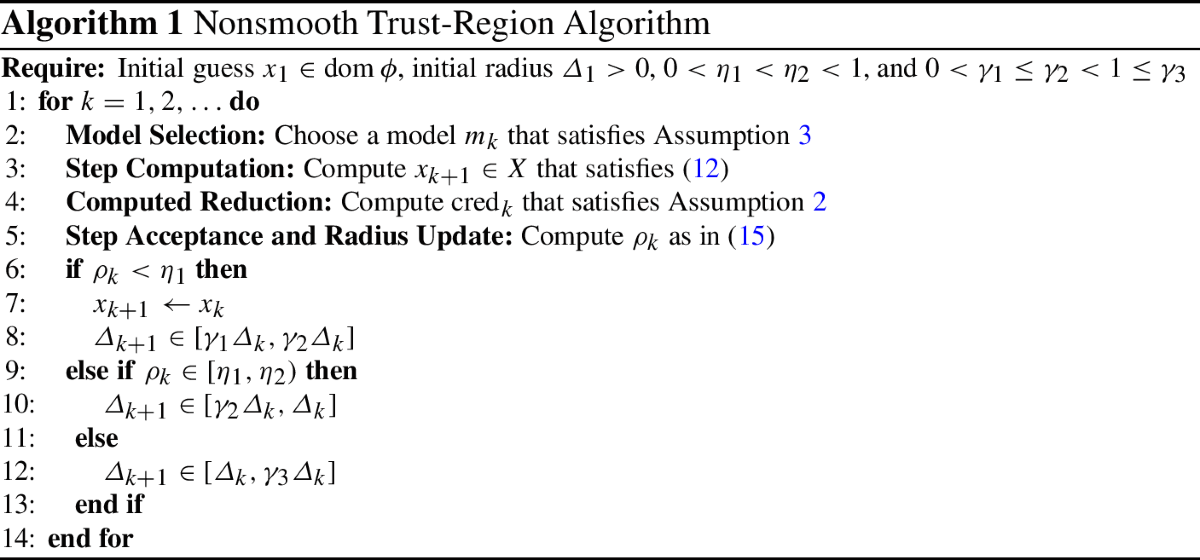
本文系统介绍了MATLAB在非线性规划问题中的应用,涵盖了理论基础、算法原理、求解器使用实践、稳定性策略提升、求解性能优化技巧以及未来发展趋势。文章首先概述了非线性规划的定义、分类及常见算法,接着深入探讨了MATLAB求解器的选择、配置、参
移动优先设计指南:打造完美响应式网站
# 摘要
随着移动设备的普及,移动优先设计成为构建现代Web应用的关键策略。本文系统地阐述了移动优先设计的概念和响应式网站设计的理论基础,包括媒体查询、弹性布局和响应式设计的三大支柱。文章深入探讨了实践中的响应式设计技巧,如布局、排版以及用户界面组件的响应式实现,并强调了性能优化与测试的重要性。此外,本文展望了移动优先设计的高级应用,包括集成前端框架、工具以及进阶
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )