机械臂视觉抓取:OpenCV视觉传感器与数据融合,增强感知能力
发布时间: 2024-08-07 13:49:32 阅读量: 76 订阅数: 32 
# 1. 机械臂视觉抓取概述**
机械臂视觉抓取是机器人技术中的一项关键技术,它使机器人能够通过视觉传感器感知环境并抓取目标物体。视觉抓取系统通常包括一个或多个摄像头、图像处理算法和机械臂。
视觉抓取在工业自动化、仓储物流和服务机器人等领域具有广泛的应用。它可以提高机器人的抓取精度和效率,并使机器人能够处理形状复杂、姿态多变的目标物体。
# 2. OpenCV视觉传感器原理与应用
### 2.1 OpenCV图像处理基础
OpenCV(Open Source Computer Vision Library)是一个开源的计算机视觉库,为图像处理、视频分析和机器学习提供了广泛的算法和函数。在机械臂视觉抓取中,OpenCV用于处理来自视觉传感器的图像数据,提取有价值的信息。
#### 2.1.1 图像获取和预处理
图像获取是视觉抓取的第一步。OpenCV提供了一系列函数来从摄像头或图像文件中获取图像。获取的图像通常需要预处理,以去除噪声、增强对比度和标准化大小。
```python
import cv2
# 从摄像头获取图像
cap = cv2.VideoCapture(0)
ret, frame = cap.read()
# 图像预处理
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY) # 转换为灰度图像
blur = cv2.GaussianBlur(gray, (5, 5), 0) # 高斯滤波去噪
thresh = cv2.threshold(blur, 127, 255, cv2.THRESH_BINARY)[1] # 二值化
```
#### 2.1.2 图像分割和特征提取
图像分割将图像分割成具有相似特征的不同区域。OpenCV提供了多种分割算法,如轮廓检测、区域生长和聚类。特征提取从图像中提取有意义的信息,如形状、纹理和颜色。
```python
# 轮廓检测
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# 特征提取
moments = [cv2.moments(cnt) for cnt in contours]
areas = [m['m00'] for m in moments]
```
### 2.2 目标检测与识别算法
目标检测和识别是机械臂视觉抓取的关键任务。OpenCV提供了传统的目标检测方法和深度学习目标检测方法。
#### 2.2.1 传统目标检测方法
传统目标检测方法包括模板匹配、霍夫变换和角点检测。这些方法通常依赖于手动设计的特征,对复杂场景的鲁棒性较差。
```python
# 模板匹配
template = cv2.imread('template.jpg', 0)
result = cv2.matchTemplate(gray, template, cv2.TM_CCOEFF_NORMED)
min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(result)
```
#### 2.2.2 深度学习目标检测方法
深度学习目标检测方法,如YOLO、Faster R-CNN和SSD,利用卷积神经网络(CNN)从图像中学习特征。这些方法具有较高的精度和鲁棒性,但需要大量训练数据。
```python
# YOLO目标检测
net = cv2.dnn.readNetFromDarknet('yolov3.cfg', 'yolov3.weights')
blob = cv2.dnn.blobFromImage(frame, 1 / 255.0, (416, 416), (0, 0, 0), swapRB=True, crop=False)
net.setInput(blob)
detections = net.forward()
```
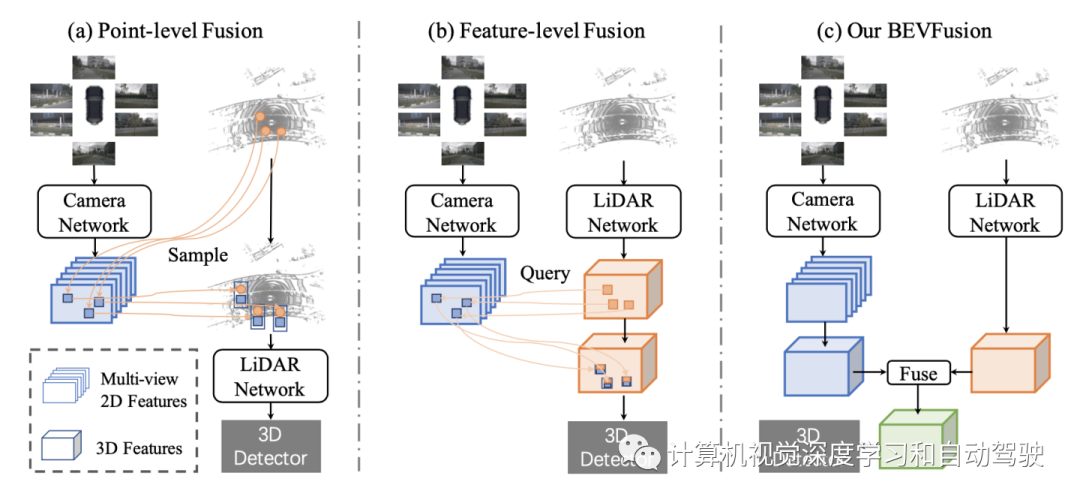
# 3.1 多传感器数据融合技术
#### 3.1.1 数据融合框架
数据融合框架是多传感器数据融合系统中至关重要的组成部分,它定义了系统中数据处理和融合的整体流程。常用的数据融合框架包括:
- **集中式融合框架:**所有传感器数据都被发送到一个中央融合中心,在那里进行处理和融合。这种框架具有较高的融合精度,但存在单点故障风险和通信带宽要求高的问题。
- **分布式融合框架:**传感器数据在各个传感器节点上进行预处理和局部融合,然后将融合结果发送到中央融合中心进行进一步处理。这种框架具有较好的鲁棒性和可扩展性,但融合精度可能低于集中式框架。
- **混合融合框架:**结合了集中式和分布式框架的优点,将数据处理和融合任务分配到多个层次。这种框架可以实现较高的融合精度和系统鲁棒性。
#### 3.1.2 数据融合算法
数据融合算法是数据融合系统中用于处理和融合传感器数据的方法。常用的数据融合算法包括:
- **加权平均算法:**将不同传感器的数据按照预先设定的权重进行加权平均,得到融合结果。这种算法简单易用,但融合精度受传感器权重选择的影响。
- **卡尔曼滤波算法:**一种递归估计算法,通过预测和更新步骤对传感器数据进行融合。这种算法具有较高的融合精度,但计算复杂度较高。
- **粒子滤波算法:**一种蒙特卡罗方法,通过模拟粒子群的行为对传感器数据进行融合。这种算法具有较好的鲁棒性,但计算复杂度较高。
**代码块:**
```python
import numpy as np
# 加权平均算法
def weighted_average(data, weights):
"""
加权平均算法
参数:
data:传感器数据
weights:传感器权重
"""
return np.sum(data * weights) / np.sum(weights)
# 卡尔曼滤波算法
class KalmanFilter:
def __init__(self, A, B, C, Q, R):
"""
卡尔曼滤波算法
参数:
A:状态转移矩阵
B:控制矩阵
C:观测矩阵
Q:过程噪声协方差矩阵
R:观测噪声协方差矩阵
"""
self.A = A
self.B = B
self.C = C
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0

专栏简介
本专栏深入剖析了机械臂视觉抓取中使用 OpenCV 的技术。从图像处理、物体识别到图像分割、特征提取、算法优化等方面,提供了全面的实战指南。同时,专栏还探讨了机械臂视觉抓取的挑战和解决方案,包括目标检测、深度学习、图像增强、降噪、图像配准、三维重建、运动规划、路径生成、视觉伺服、闭环控制、图像分析、物体检测、跟踪、传感器融合、与其他传感器协作等。通过这些技巧和实战案例,专栏旨在帮助工程师和研究人员提升机械臂视觉抓取的精度、效率和稳定性,从而推动工业自动化和机器人领域的进步。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
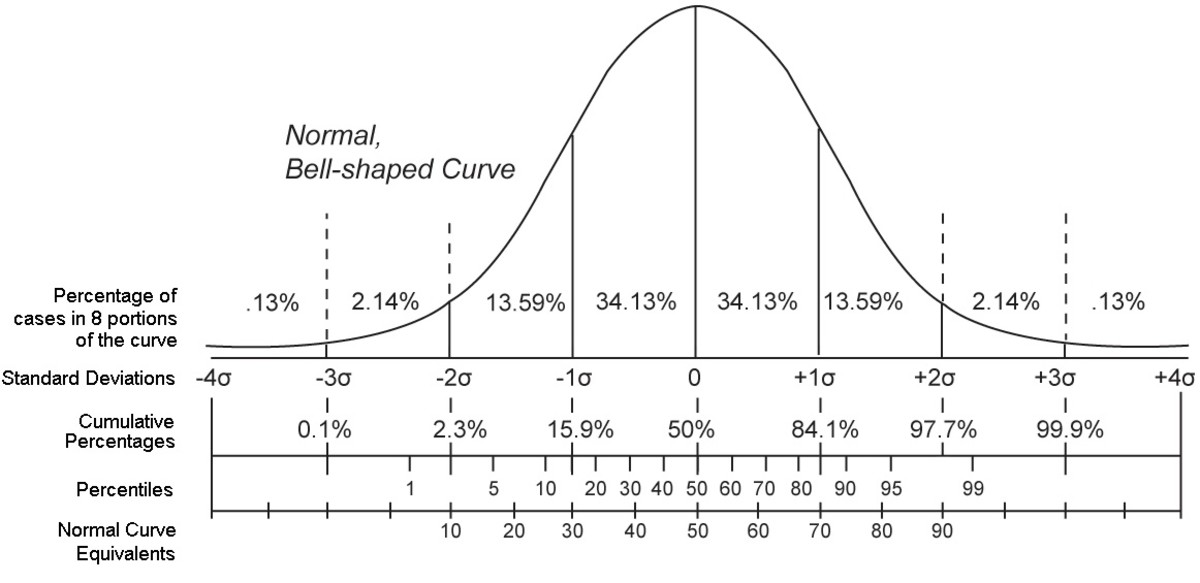
【概率论与数理统计:工程师的实战解题宝典】:揭示习题背后的工程应用秘诀
# 摘要
本文从概率论与数理统计的角度出发,系统地介绍了其基本概念、方法与在工程实践中的应用。首先概述了概率论与数理统计的基础知识,包括随机事件、概率计算以及随机变量的数字特征。随后,重点探讨了概率分布、统计推断、假设检验
【QSPr参数深度解析】:如何精确解读和应用高通校准综测工具

# 摘要
QSPr参数是用于性能评估和优化的关键工具,其概述、理论基础、深度解读、校准实践以及在系统优化中的应用是本文的主题。本文首先介绍了QSPr工具及其参数的重要性,然后详细阐述了参数的类型、分类和校准理论。在深入解析核心参数的同时,也提供了参数应用的实例分析。此外,文章还涵盖了校准实践的全过程,包括工具和设备准备、操作流程以及结果分析与优化。最终探讨了QSPr参数在系统优化中的
探索自动控制原理的创新教学方法

# 摘要
本文深入探讨了自动控制理论在教育领域中的应用,重点关注理论与教学内容的融合、实践教学案例的应用、教学资源与工具的开发、评估与反馈机制的建立以
Ubuntu 18.04图形界面优化:Qt 5.12.8性能调整终极指南

# 摘要
本文全面探讨了Ubuntu 18.04系统中Qt 5.12.8图形框架的应用及其性能调优。首先,概述了Ubuntu 18.04图形界面和Qt 5.12.8核心组件。接着,深入分析了Qt的模块、事件处理机制、渲染技术以及性能优化基
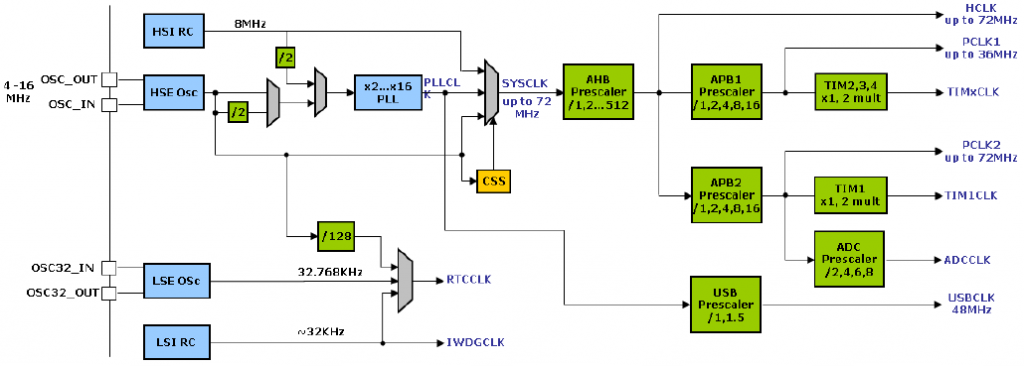
STM32F334节能秘技:提升电源管理的实用策略
# 摘要
本文全面介绍了STM32F334微控制器的电源管理技术,包括基础节能技术、编程实践、硬件优化与节能策略,以及软件与系统级节能方案。文章首先概述了STM32F334及其电源管理模式,随后深入探讨了低功耗设计原则和节能技术的理论基础。第三章详细阐述了RTOS在节能中的应用和中断管理技巧,以及时钟系统的优化。第四章聚焦于硬件层面的节能优化,包括外围设备选型、电源管
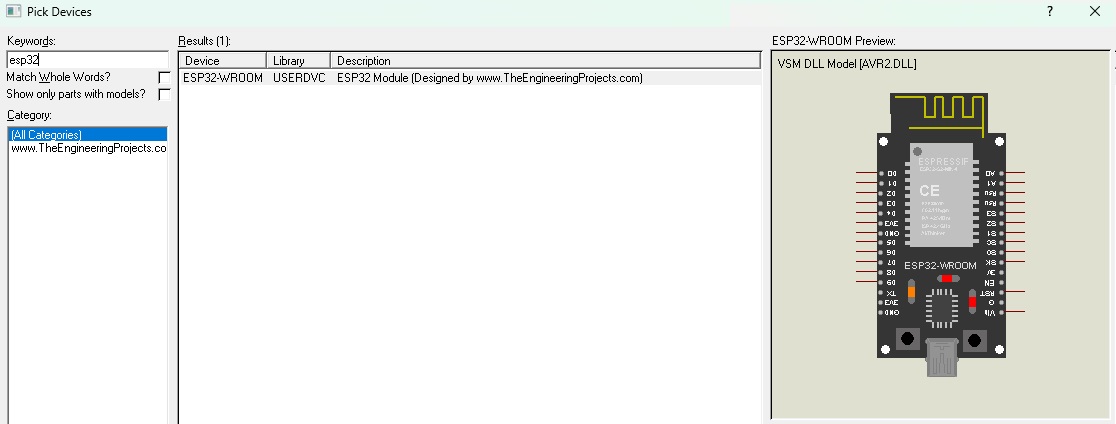
【ESP32库文件管理】:Proteus中添加与维护技术的高效策略
# 摘要
本文旨在全面介绍ESP32微控制器的库文件管理,涵盖了从库文件基础到实践应用的各个方面。首先,文章介绍了ESP32库文件的基础知识,包括库文件的来源、分类及其在Proteus平台的添加和配置方法。接着,文章详细探讨了库文件的维护和更新流程,强调了定期检查库文件的重要性和更新过程中的注意事项。文章的第四章和第五章深入探讨了ESP3
【实战案例揭秘】:遥感影像去云的经验分享与技巧总结

# 摘要
遥感影像去云技术是提高影像质量与应用价值的重要手段,本文首先介绍了遥感影像去云的基本概念及其必要性,随后深入探讨了其理论基础,包括影像分类、特性、去云算法原理及评估指标。在实践技巧部分,本文提供了一系列去云操作的实际步骤和常见问题的解决策略。文章通过应用案例分析,展示了遥感影像去云技术在不同领域中的应用效果,并对未来遥感影像去云技术的发
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )