单片机控制系统模糊控制揭秘:掌握核心技术,打造智能控制系统
发布时间: 2024-07-14 12:46:57 阅读量: 58 订阅数: 25 

基于单片机的模糊控制系统
# 1. 单片机控制系统概述**
单片机控制系统是一种基于单片机的嵌入式系统,它将微处理器、存储器、输入/输出接口和其它外围设备集成在一个芯片上。单片机控制系统具有体积小、成本低、功耗低、可靠性高等优点,广泛应用于工业控制、消费电子、医疗设备等领域。
单片机控制系统通常由传感器、执行器、单片机和软件组成。传感器负责采集系统外部环境信息,执行器负责执行控制命令,单片机负责处理信息并控制执行器。软件是单片机控制系统的核心,它定义了系统的控制逻辑和算法。
# 2. 模糊控制理论基础
### 2.1 模糊集合与模糊逻辑
**2.1.1 模糊集合的定义与性质**
模糊集合是一种将元素映射到[0, 1]区间上的集合,表示元素属于该集合的程度。它不同于经典集合,其中元素要么属于集合,要么不属于集合。
**定义:** 模糊集合A在域U上的定义为:
```
A: U -> [0, 1]
```
其中,U是元素的集合,A(x)表示元素x属于集合A的程度。
**性质:**
* **归一性:** 对于任何x∈U,有0 ≤ A(x) ≤ 1。
* **凸性:** 对于任何x, y∈U和λ∈[0, 1],有λA(x) + (1-λ)A(y) ≤ A(λx + (1-λ)y)。
* **扩张性:** 对于任何x, y∈U,如果x ≤ y,则A(x) ≤ A(y)。
### 2.1.2 模糊逻辑推理规则
模糊逻辑推理规则是一种基于模糊集合的推理规则。它允许使用模糊变量和模糊值进行推理。
**规则格式:**
```
IF 前提 THEN 后果
```
其中,前提和后果都是模糊命题,例如:
```
IF 温度很低 THEN 加热器打开
```
**推理过程:**
1. **前提求值:** 计算前提中模糊变量的隶属度。
2. **模糊推理:** 根据模糊推理规则,计算后果模糊变量的隶属度。
3. **反模糊化:** 将后果模糊变量的隶属度转换为具体值。
### 2.2 模糊控制器设计
**2.2.1 模糊化和反模糊化**
**模糊化:** 将输入变量转换为模糊变量,表示其属于不同模糊集合的程度。
**反模糊化:** 将模糊变量转换为具体值,表示控制输出。
**2.2.2 模糊规则库的建立**
模糊规则库是一组模糊逻辑推理规则,用于描述控制系统的行为。规则库的建立需要专家知识和经验。
**流程:**
1. **定义模糊变量:** 确定控制系统中需要考虑的模糊变量。
2. **定义模糊集合:** 为每个模糊变量定义模糊集合,例如“低”、“中”、“高”。
3. **建立模糊规则:** 根据专家知识和经验,建立模糊逻辑推理规则。
# 3. 单片机模糊控制系统实现
### 3.1 模糊控制算法移植
#### 3.1.1 模糊化和反模糊化的实现
**模糊化**
模糊化是将输入变量转换为模糊变量的过程。在单片机系统中,模糊化通常使用查表法实现。查表法将输入变量的量化值映射到相应的模糊集合隶属度值。
**代码块:**
```c
uint8_t fuzzify(float input) {
// 查表映射输入值到模糊集合隶属度值
if (input < 0) {
return 0; // 负小
} else if (input < 50) {
return 1; // 小
} else if (input < 100) {
return 2; // 中
} else if (input < 150) {
return 3; // 大
} else {
return 4; // 很大
}
}
```
**逻辑分析:**
该代码块根据输入变量 `input` 的值,将其映射到五个模糊集合:负小、小、中、大、很大。映射规则基于查表法,输入值被量化为 0-150 之间的整数,并根据范围映射到相应的模糊集合。
**反模糊化**
反模糊化是将模糊输出变量转换为实际输出变量的过程。在单片机系统中,反模糊化通常使用重心法实现。重心法计算模糊输出集合的重心,并将其作为实际输出值。
**代码块:**
```c
float defuzzify(uint8_t* output) {
// 计算模糊输出集合的重心
float sum = 0;
float weight = 0;
for (int i = 0; i < 5; i++) {
sum += output[i] * (i * 50 + 25);
weight += output[i];
}
return sum / weight;
}
```
**逻辑分析:**
该代码块根据模糊输出变量 `output` 的值,计算模糊输出集合的重心。模糊输出变量是一个长度为 5 的数组,表示五个模糊集合的隶属度值。重心计算通过遍历数组,将每个模糊集合的隶属度值乘以其对应的中心值,并求和。然后将和除以所有隶属度值的总和,得到实际输出值。
### 3.1.2 模糊规则库的存储
模糊规则库是模糊控制系统的重要组成部分,它包含了控制系统行为的规则。在单片机系统中,模糊规则库通常存储在 ROM 或 EEPROM 中。
**代码块:**
```c
const uint8_t rule_table[25] = {
// 规则表:输入1 x 输入2 -> 输出
{ 0, 0, 0 }, // 负小 x 负小 -> 负小
{ 0, 1, 1 }, // 负小 x 小 -> 小
{ 0, 2, 2 }, // 负小 x 中 -> 中
// ... 省略其他规则
};
```
**逻辑分析:**
该代码块定义了一个常量数组 `rule_table`,它存储了模糊规则库。数组的每个元素是一个三元组,表示一条模糊规则。三元组的第一个元素是输入 1 的模糊集合编号,第二个元素是输入 2 的模糊集合编号,第三个元素是输出的模糊集合编号。
### 3.2 单片机系统硬件设计
#### 3.2.1 传感器和执行器的选择
传感器用于测量被控对象的输入变量,执行器用于控制被控对象的输出变量。在单片机模糊控制系统中,传感器和执行器的选择取决于具体应用。
**传感器:**
* **温度传感器:**用于测量温度。
* **光传感器:**用于测量光照强度。
* **位置传感器:**用于测量位置或距离。
**执行器:**
* **电机:**用于控制运动。
* **加热器:**用于控制温度。
* **继电器:**用于开关电路。
#### 3.2.2 模糊控制算法的硬件实现
模糊控制算法可以在单片机中通过软件实现,也可以通过专用硬件实现。
**软件实现:**
* 使用单片机的 CPU 执行模糊控制算法。
* 优点:灵活,易于修改。
* 缺点:计算速度慢,功耗高。
**硬件实现:**
* 使用专用硬件电路实现模糊控制算法。
* 优点:计算速度快,功耗低。
* 缺点:不灵活,修

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 C 语言与单片机控制的广泛应用,从原理到应用、核心技术到系统设计,提供全面的指导。专栏文章涵盖了单片机控制系统的各个方面,包括:
* **系统原理和应用:**揭秘单片机控制系统的架构和实际应用。
* **C 语言应用:**深入解析 C 语言在单片机控制中的核心技术,提升控制效率。
* **系统设计:**提供单片机控制系统设计秘籍,从需求分析到实现。
* **调试技巧:**分享 C 语言单片机控制系统调试秘籍,快速解决问题。
* **常见问题:**大揭秘单片机控制系统常见问题,快速诊断和解决。
* **高级应用:**探索 C 语言与单片机控制的高级应用和案例分析。
* **嵌入式系统设计:**揭秘单片机控制系统中的嵌入式系统架构。
* **实时性与可靠性:**掌握核心技术,打造稳定高效的单片机控制系统。
* **传感器与执行器接口:**建立可靠连接,提升系统性能。
* **中断处理:**快速响应,打造高实时性系统。
* **嵌入式操作系统:**掌握核心技术,打造高性能系统。
* **图像处理:**解锁视觉能力,打造智能系统。
* **电机控制:**掌握核心技术,打造高性能电机控制系统。
* **PID 控制:**快速掌握,打造稳定高效的控制系统。
* **神经网络:**解锁人工智能,打造智能控制系统。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
C Shell 函数编写与应用:代码复用的终极指南
# 摘要
本文全面探讨了C Shell 函数从基础编写到高级应用的各个方面,涵盖了参数传递、作用域管理、调试测试以及性能优化和安全维护等关键技术点。通过对C Shell 函数参数和返回值的深入分析,揭示了参数传递机制和返回值的使用限制。同时,文章着重讨论了函数作用域和生命周期内的局部与全局变量处理,以及加载和销毁时机。在实践应用部分,文中提供了自动化脚本和系统管理中函数应用的实例,
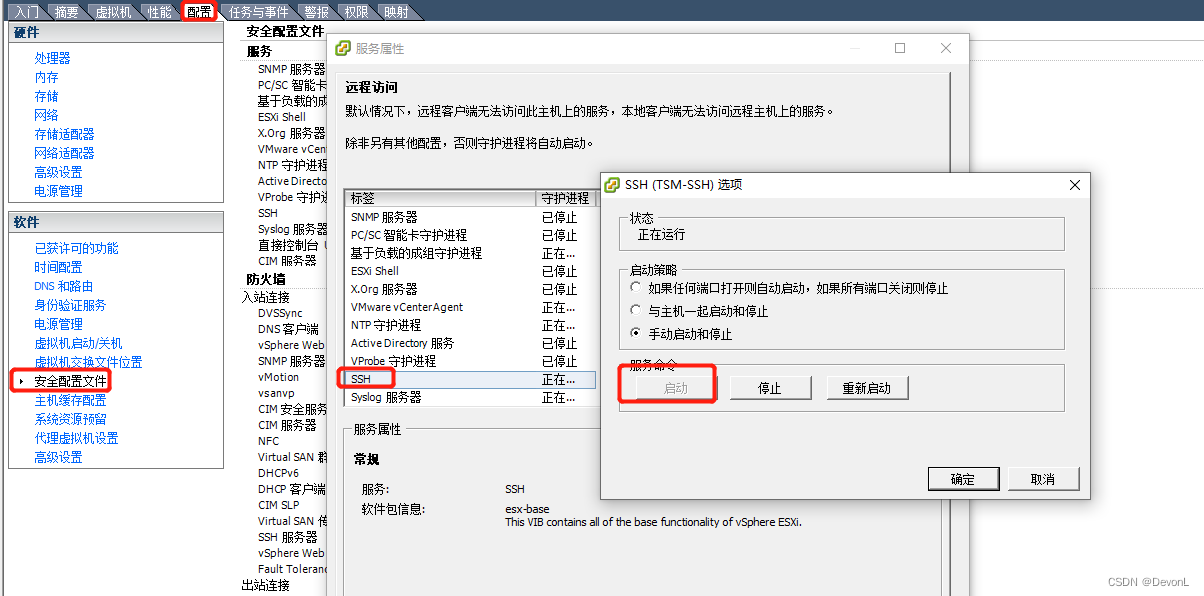
【忘记ESXi密码怎么办】:解决方法大全及预防策略
# 摘要
ESXi密码重置是一个关键环节,涉及系统安全性和管理便利性。本文全面介绍了ESXi密码重置的基本概念、理论基础和实践指南,阐述了密码在ESXi系统中的作用、安全性以及最佳实践。文中详细讲解了本地和远程密码重置的多种方法,并介绍了使用第三方工具和脚本以及ESXi Shell和API的高级技术。最后,文章探讨了系统安全加固和密码管理的预防策略,包括禁用不必要的服务、定期审计和多因素认证,以提高整体安
【TwinCAT 2.0 PLC编程入门】:轻松掌握PLC与TwinCAT的完美融合
.png)
# 摘要
本文全面介绍了TwinCAT 2.0环境的搭建、PLC编程基础以及高级功能的实践应用。首先,从安装配置到项目管理,详细阐述了如何在TwinCAT 2.0中创建和维护工程。随后,转向PLC
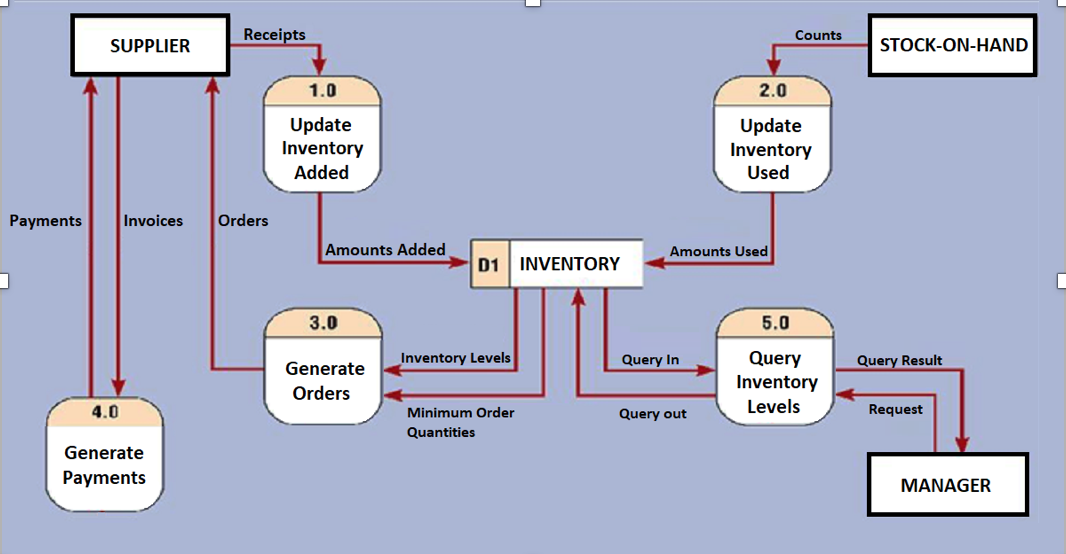
数据流图全解析:如何设计支撑高效检查发货单的业务系统
# 摘要
数据流图(DFD)作为系统分析与设计的重要工具,为业务系统设计提供了一个清晰的视图,通过图形化方式展示了信息流和处理过程。本文从基础概念讲起,深入探讨了数据流图的设计理论和层次结构,同时结合业务系统设计实例,分析了数据流图在实际应用中的指导作用及其与其他设计工具的结合方式。进一步地,本文探讨了数据流图在系统实现与优化过程中的应用,并展望了数据流图技术的创新
【Skylake-X与Skylake-SP核心差异】:企业级优选对比权威指南

# 摘要
本文全面介绍了Skylake核心架构及其衍生产品Skylake-X和Skylake-SP的技术细节和市场定位。通过对Skylake-X和
软件开发安全:CISSP理解深度与生命周期管理
# 摘要
随着信息技术的迅速发展,软件开发安全成为企业和组织的重要关注点。本文系统地概述了CISSP在软件开发生命周期中的安全管理实践,包括安全集成、风险评估、测试与漏洞管理等方面。详细探讨了应用安全框架、加密技术、第三方组件管理等核心应用安全实践,并阐述了在软件维护与部署中,如何通过安全配置、应急响应、部署策略和更新管理来维护软件安全。最后,本文展望了DevOps、人工智能、机器学习以及隐私保护等技术在软件开发安全领域的未来趋势,强调了企业在应对全球性合规性挑战时的策略和应对措施。
# 关键字
CISSP;软件开发安全;风险管理;安全测试;应用安全框架;数据保护;DevOps;AI/ML应
【深入Patran载荷向导】:精通参数设置与高效分析流程

# 摘要
本文旨在介绍和分析Patran载荷向导在有限元分析中的功能、操作、应用以及优化方法。文章首先概述了载荷向导的基本概念及其在有限元分析中的作用,随后详细阐述了载荷向导的类型、设置和
【IBIS模型与高速设计】:揭秘其在仿真结果中的决定性作用
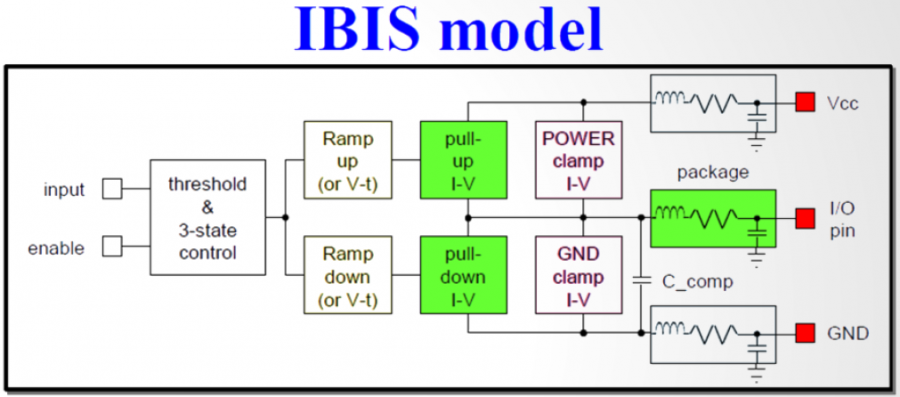
# 摘要
IBIS模型作为一种广泛应用于高速电路设计中的行为级互连建模标准,提供了对IC引脚电气特性描述的非专利方式。本文首先介绍了IBIS模型的基础知识和理论结构,随后深入探讨了其在高速设计中的应用,包括仿真前的准备、仿真流程以及信号完整性分析中的作用。文章还分析了IBIS模型的高级应用,探讨了优化策略和最佳实践,并展望了IBIS模型在新兴技术影响下的未来发展趋势及
定时数据刷新自动化:Power Query进阶数据加载技术

# 摘要
本文深入探讨了Power Query在自动化数据处理与企业数据治理中的应用。首先对Power Query的基础知识进行了回顾,随后重点分析了定时数据刷新的理论与实践,包括刷新类型、触发机制、频率调整以及高级配置的优化策略。接着,文章详细介绍了如何通过Power Query进行自动化数据处理,涵盖数据转换、加载、编写自动化脚本、函数调用和参数化数据加载等方面
图结构在软件工程中的十大应用案例:视觉信息的完美呈现

# 摘要
本文探讨了图结构在软件工程中的基础概念、理论应用、实践技巧及高级案例。首先,介绍了图结构基本概念和软件工程的核心原则。然后,分析了图结构在软件设计、维护、测试中的理论应用,包括设计模式、模块依赖性、代码重构和测试覆盖率。在实践技巧章节,阐述了图数据库的使用、图算法优化及图分析工具的实际应用。通过分析大型系统架构、软件开发工具集成和项目管理中的具体案例,展示了
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )