车牌识别图像分割技术:MATLAB详解与应用
发布时间: 2024-06-11 08:44:53 阅读量: 196 订阅数: 44 

# 1. 车牌图像分割理论基础
图像分割是计算机视觉中一项重要的技术,其目的是将图像分解为具有不同特征的独立区域。车牌图像分割是车牌识别系统中的关键步骤,通过分割车牌区域和字符区域,为后续的字符识别奠定基础。
### 1.1 图像分割的基本概念
图像分割将图像划分为具有相似特征的区域,这些特征包括颜色、纹理、形状等。分割算法的目的是找到这些区域之间的边界,并将其分离。
### 1.2 图像分割的分类
根据分割算法的原理,图像分割可以分为以下几类:
- **基于阈值的分割:**使用阈值将图像像素划分为不同的区域。
- **基于区域的分割:**将具有相似特征的像素分组为区域。
- **基于边缘的分割:**通过检测图像中的边缘来分割区域。
# 2. MATLAB图像分割技术详解
### 2.1 基于阈值的分割
基于阈值的分割是一种简单的图像分割技术,它将图像像素分为两类:目标和背景。分割过程通过设置一个阈值来实现,高于阈值的像素被归为目标,而低于阈值的像素被归为背景。
#### 2.1.1 全局阈值法
全局阈值法使用一个单一的阈值来分割整个图像。该阈值通常是图像灰度值的平均值或中值。全局阈值法简单易用,但对于具有复杂背景或光照不均匀的图像效果不佳。
```matlab
% 读取图像
image = imread('car_plate.jpg');
% 灰度化
grayImage = rgb2gray(image);
% 计算全局阈值
threshold = graythresh(grayImage);
% 分割图像
segmentedImage = im2bw(grayImage, threshold);
% 显示分割结果
imshow(segmentedImage);
```
**代码逻辑分析:**
* `imread()` 函数读取图像文件。
* `rgb2gray()` 函数将彩色图像转换为灰度图像。
* `graythresh()` 函数计算图像的全局阈值。
* `im2bw()` 函数根据阈值将灰度图像转换为二值图像。
* `imshow()` 函数显示分割结果。
#### 2.1.2 局部阈值法
局部阈值法使用不同的阈值来分割图像的不同区域。这对于具有复杂背景或光照不均匀的图像非常有用。局部阈值法通常使用滑动窗口来计算每个像素的阈值。
```matlab
% 读取图像
image = imread('car_plate.jpg');
% 灰度化
grayImage = rgb2gray(image);
% 创建滑动窗口
windowSize = 3;
window = ones(windowSize, windowSize) / (windowSize * windowSize);
% 计算局部阈值
localThresholds = imfilter(grayImage, window);
% 分割图像
segmentedImage = im2bw(grayImage, localThresholds);
% 显示分割结果
imshow(segmentedImage);
```
**代码逻辑分析:**
* `imfilter()` 函数使用滑动窗口计算每个像素的局部阈值。
* 其余步骤与全局阈值法相同。
### 2.2 基于区域的分割
基于区域的分割将图像分割为具有相似属性的区域。这些属性可以包括像素的灰度值、纹理或形状。基于区域的分割通常使用连通域分析或分水岭算法。
#### 2.2.1 连通域分割
连通域分割将具有相同灰度值或其他属性的相邻像素分组为连通域。然后,这些连通域被标记为不同的区域。
```matlab
% 读取图像
image = imread('car_plate.jpg');
% 灰度化
grayImage = rgb2gray(image);
% 连通域分析
connectedComponents = bwconncomp(grayImage);
% 获取连通域属性
numComponents = connectedComponents.NumObjects;
componentLabels = connectedComponents.PixelIdxList;
% 显示分割结果
figure;
for i = 1:numComponents
componentImage = zeros(size(grayImage));
componentImage(componentLabels{i}) = 1;
subplot(1, numComponents, i);
imshow(componentImage);
end
```
**代码逻辑分析:**
* `bwconncomp()` 函数执行连通域分析并返回连通域的属性。
* `PixelIdxList` 属性包含每个连通域中像素的索引。
* 使用 `subplot()` 函数显示每个连通域的图像。
#### 2.2.2 分水岭分割
分水岭分割将图像视为地形图,其中像素的灰度值表示高度。算法从图像中的局部极小值开始,并逐步扩展到周围区域,直到遇到分水岭或图像边界。
```matlab
% 读取图像
image = imread('car_plate.jpg');
% 灰度化
grayImage = rgb2gray(image);
% 分水岭分割
watershedImage = watershed(grayImage);
% 显示分割结果
imshow(label2rgb(watershedImage));
```
**代码逻辑分析:**
* `watershed()` 函数执行分水岭分割并返回分割结果。
* `label2rgb()` 函数将分割结果转换为彩色图像,其中每个区域用不同的颜色表示。
### 2.3 基于边缘的分割
基于边缘的分割将图像分割为具有不同边缘的区域。边缘通常是图像中灰度值快速变化的地方。基于边缘的分割通常使用 Canny 或 Sobel 边缘检测算法。
#### 2.3.1 Canny边缘检测
Canny 边缘检测算法是一种多阶段边缘检测算法,它使用高斯滤波器平滑图像,然后使用 Sobel 算子计算图像梯度。最后,算法使用非极大值抑制和滞后阈值化来生成边缘图像。
```matlab
% 读取图像
image = imread('car_plate.jpg');
% 灰度化
grayImage = rgb2gray(image);
% Canny 边缘检测
edges = edge(grayImage, 'canny');
% 显示分割结果
imshow(edges);
```
**代码逻辑分析:**
* `edge()` 函数使用 Canny 边缘检测算法生成边缘图像。
#### 2.3.2 Sobel边缘检测
Sobel 边缘检测算法是一种使用 Sobel 算子计算图像梯度的边缘检测算法。Sobel 算子是一个 3x3 卷积核,用于计算图像中水平和垂直方向的梯度。
```matlab
% 读取图像
image = imread('car_plate.jpg');
% 灰度化
grayImage = rgb2gray(image);
% Sobel 边缘检测
Gx = imfilter(grayImage, [-1 0 1; -2 0 2; -1 0 1]);
Gy = imfilter(grayImage, [-1 -2 -1; 0 0 0; 1 2 1]);
% 计算边缘幅度
edges = sqrt(Gx.^2 + Gy.^2);
% 显示分割结果
imshow(edges);
```
**代码逻辑分析:**
* `imfilter()` 函数使用 Sobel 算子计算图像梯度。
* `sqrt()` 函数计算边缘幅度。
# 3. 车牌图像分割MATLAB实践
### 3.1 图像预处理
#### 3.1.1 灰度化
车牌图像通常为彩色图像,在进行分割之前需要将其转换为灰度图像。灰度化可以去除图像中的颜色信息,简化图像处理过程。MATLAB中使用`rgb2gray`函数可以实现图像灰度化。
```matlab
% 读入彩色车牌图像
image = imread('car_plate.jpg');
% 灰度化图像
gray_image = rgb2gray(image);
% 显示灰度化图像
imshow(gray_image);
```
#### 3.1.2 噪声去除
车牌图像中可能存在噪声,如椒盐噪声、高斯噪声等。噪声会影响分割效果,因此需要对图像进行噪声去除。MATLAB中提供了多种噪声去除滤波器,如中值滤波、高斯滤波等。
```matlab
% 中值滤波去除噪声
denoised_image = medfilt2(gray_image);
% 显示去噪后的图像
imshow(denoised_image);
```
### 3.2 图像分割
#### 3.2.1 阈值法分割
阈值法分割是一种简单的分割方法,通过设置一个阈值将图像像素分为两类:前景和背景。MATLAB中使用`im2bw`函数可以实现阈值法分割。
```matlab
% 设置阈值
threshold = 120;
% 阈值法分割
binary_image = im2bw(denoised_image, threshold / 255);
% 显示分割结果
imshow(binary_image);
```
#### 3.2.2 区域生长法分割
区域生长法分割是一种基于区域的分割方法,从种子点开始,逐步将相邻像素合并到同一区域。MATLAB中使用`regionprops`和`bwlabel`函数可以实现区域生长法分割。
```matlab
% 获取种子点坐标
seed_point = [100, 100];
% 区域生长分割
[labeled_image, num_objects] = bwlabel(binary_image, 8);
region_props = regionprops(labeled_image, 'BoundingBox');
% 显示分割结果
imshow(labeled_image);
hold on;
for i = 1:num_objects
rectangle('Position', region_props(i).BoundingBox, 'EdgeColor', 'r');
end
hold off;
```
### 3.3 分割结果评估
#### 3.3.1 精度指标
精度指标衡量分割结果中正确识别的前景像素的比例。
```matlab
% 计算精度
ground_truth = imread('car_plate_ground_truth.png');
binary_image = im2bw(denoised_image, threshold / 255);
accuracy = sum(binary_image(:) == ground_truth(:)) / numel(binary_image);
fprintf('精度:%.2f%%\n', accuracy * 100);
```
#### 3.3.2 召回率指标
召回率指标衡量分割结果中正确识别的所有前景像素的比例。
```matlab
% 计算召回率
ground_truth = imread('car_plate_ground_truth.png');
binary_image = im2bw(denoised_image, threshold / 255);
recall = sum(binary_image(:) & ground_truth(:)) / sum(ground_truth(:));
fprintf('召回率:%.2f%%\n', recall * 100);
```
# 4. 车牌图像分割MATLAB进阶应用
### 4.1 车牌定位
车牌定位是车牌识别系统中的关键步骤,其目的是在图像中准确地找到车牌区域。MATLAB提供了多种车牌定位算法,其中常用的方法包括滑动窗口法和基于边缘的定位。
#### 4.1.1 滑动窗口法
滑动窗口法是一种简单且有效的车牌定位方法。其基本原理是将一个固定大小的窗口在图像上滑动,并对每个窗口内的像素进行特征提取和分类。如果窗口内包含车牌的特征,则认为该窗口找到了车牌。
MATLAB中实现滑动窗口法,可以使用以下步骤:
1. 读取车牌图像并将其转换为灰度图像。
2. 定义滑动窗口的大小和步长。
3. 遍历图像,以定义的步长滑动窗口。
4. 在每个窗口内,提取特征(如灰度直方图、纹理特征等)。
5. 将提取的特征输入分类器,判断窗口内是否包含车牌。
6. 如果分类器输出为正,则认为窗口找到了车牌。
```matlab
% 读取车牌图像
image = imread('car_plate.jpg');
% 转换为灰度图像
gray_image = rgb2gray(image);
% 定义滑动窗口大小和步长
window_size = [100, 50];
step_size = [10, 10];
% 遍历图像,滑动窗口
for i = 1:step_size(1):size(gray_image, 1) - window_size(1)
for j = 1:step_size(2):size(gray_image, 2) - window_size(2)
% 获取窗口内的像素
window = gray_image(i:i+window_size(1)-1, j:j+window_size(2)-1);
% 提取特征
features = extract_features(window);
% 输入分类器
result = classify(classifier, features);
% 判断窗口内是否包含车牌
if result == 1
% 找到车牌
bounding_box = [i, j, window_size(1), window_size(2)];
% 绘制边界框
rectangle('Position', bounding_box, 'EdgeColor', 'r', 'LineWidth', 2);
end
end
end
```
#### 4.1.2 基于边缘的定位
基于边缘的定位方法利用车牌边缘的特征来定位车牌。其基本原理是检测图像中的边缘,然后根据边缘的形状和位置来判断车牌的区域。
MATLAB中实现基于边缘的定位,可以使用以下步骤:
1. 读取车牌图像并将其转换为灰度图像。
2. 使用边缘检测算子(如Canny算子)检测图像中的边缘。
3. 提取边缘的特征(如边缘长度、角度等)。
4. 根据边缘的特征,使用聚类或其他算法将边缘分组为车牌边缘。
5. 根据车牌边缘的形状和位置,确定车牌的区域。
```matlab
% 读取车牌图像
image = imread('car_plate.jpg');
% 转换为灰度图像
gray_image = rgb2gray(image);
% 边缘检测
edges = edge(gray_image, 'canny');
% 提取边缘特征
edge_features = extract_edge_features(edges);
% 聚类边缘
clusters = cluster_edges(edge_features);
% 根据边缘形状和位置确定车牌区域
bounding_box = determine_car_plate_region(clusters);
% 绘制边界框
rectangle('Position', bounding_box, 'EdgeColor', 'r', 'LineWidth', 2);
```
### 4.2 车牌字符识别
车牌字符识别是车牌识别系统中的另一关键步骤,其目的是识别车牌上的字符。MATLAB提供了多种字符识别算法,其中常用的方法包括光学字符识别技术和深度学习识别技术。
#### 4.2.1 光学字符识别技术
光学字符识别(OCR)技术是一种传统的车牌字符识别方法。其基本原理是将车牌字符分割成单个字符,然后通过模板匹配或其他算法识别每个字符。
MATLAB中实现OCR技术,可以使用以下步骤:
1. 将车牌图像分割成单个字符。
2. 对每个字符进行预处理(如归一化、去噪等)。
3. 使用模板匹配或其他算法识别每个字符。
4. 将识别的字符组合成车牌号。
```matlab
% 将车牌图像分割成单个字符
characters = segment_characters(car_plate_image);
% 对每个字符进行预处理
for i = 1:length(characters)
characters{i} = preprocess_character(characters{i});
end
% 使用模板匹配识别每个字符
recognized_characters = [];
for i = 1:length(characters)
character = characters{i};
% 创建模板
templates = create_templates();
% 匹配模板
match_scores = match_templates(character, templates);
% 识别字符
recognized_character = templates{find(match_scores == max(match_scores))};
recognized_characters = [recognized_characters, recognized_character];
end
% 组合车牌号
car_plate_number = join(recognized_characters, '');
```
#### 4.2.2 深度学习识别技术
深度学习识别技术是一种先进的车牌字符识别方法。其基本原理是使用深度神经网络(如卷积神经网络)来识别车牌字符。
MATLAB中实现深度学习识别技术,可以使用以下步骤:
1. 导入预训练的深度神经网络模型。
2. 对车牌图像进行预处理(如归一化、去噪等)。
3. 将预处理后的图像输入深度神经网络模型。
4. 获取深度神经网络模型的输出(识别结果)。
```matlab
% 导入预训练的深度神经网络模型
net = import_deep_learning_model();
% 对车牌图像进行预处理
car_plate_image = preprocess_car_plate_image(car_plate_image);
% 将预处理后的图像输入深度神经网络模型
output = net.predict(car_plate_image);
% 获取识别结果
recognized_characters = output.Labels;
```
# 5.1 现有技术总结
车牌图像分割技术在过去几十年中取得了长足的进步,从早期的基于阈值的分割到基于区域和边缘的分割,再到如今基于深度学习的分割技术。每种技术都有其优缺点,在不同的应用场景下表现出不同的效果。
**基于阈值的分割**简单易用,但对噪声和光照变化敏感。**基于区域的分割**可以有效地分割出连通区域,但对复杂背景下的分割效果不佳。**基于边缘的分割**可以准确地检测出边缘,但对噪声和纹理敏感。
**基于深度学习的分割**技术近年来取得了突破性进展,可以有效地分割出复杂背景下的车牌区域。然而,深度学习模型需要大量的训练数据,并且对计算资源要求较高。
## 5.2 未来发展展望
车牌图像分割技术仍有很大的发展空间,未来的研究方向主要集中在以下几个方面:
* **无监督分割**:开发无需人工标注训练数据的分割算法,降低算法开发成本。
* **鲁棒性提升**:提高分割算法对噪声、光照变化和复杂背景的鲁棒性。
* **实时分割**:开发低时延的分割算法,满足车牌识别系统的实时性要求。
* **多模态融合**:融合来自不同传感器(如摄像头、激光雷达)的数据,提高分割精度。
* **可解释性增强**:开发可解释性强的分割算法,便于理解和优化分割过程。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0

专栏简介
本专栏深入探讨了基于 MATLAB 的车牌识别技术,涵盖从原理到实战的各个方面。专栏文章详细介绍了车牌识别算法、图像处理技术、特征提取方法、算法优化策略、神经网络应用、系统设计、性能评估、云端部署、智慧交通应用、交通违法检测、自动驾驶应用、智慧安防、智慧城市应用、车联网赋能、图像增强、畸变校正、并行化优化、敏捷开发和停车场管理等领域。通过 MATLAB 实战案例和深入浅出的讲解,本专栏旨在帮助读者深入理解车牌识别技术,并将其应用于实际场景中。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
JY01A直流无刷IC全攻略:深入理解与高效应用

# 摘要
本文详细介绍了JY01A直流无刷IC的设计、功能和应用。文章首先概述了直流无刷电机的工作原理及其关键参数,随后探讨了JY01A IC的功能特点以及与电机集成的应用。在实践操作方面,本文讲解了JY01A IC的硬件连接、编程控制,并通过具体
数据备份与恢复:中控BS架构考勤系统的策略与实施指南

# 摘要
在数字化时代,数据备份与恢复已成为保障企业信息系统稳定运行的重要组成部分。本文从理论基础和实践操作两个方面对中控BS架构考勤系统的数据备份与恢复进行深入探讨。文中首先阐述了数据备份的必要性及其对业务连续性的影响,进而详细介绍了不同备份类型的选择和备份周期的制定。随后,文章深入解析了数据恢复的原理与流程,并通过具体案例分析展示了恢复技术的实际应用。接着,本文探讨
【TongWeb7负载均衡秘笈】:确保请求高效分发的策略与实施
.webp)
# 摘要
本文从基础概念出发,对负载均衡进行了全面的分析和阐述。首先介绍了负载均衡的基本原理,然后详细探讨了不同的负载均衡策略及其算法,包括轮询、加权轮询、最少连接、加权最少连接、响应时间和动态调度算法。接着,文章着重解析了TongWeb7负载均衡技术的架构、安装配置、高级特性和应用案例。在实施案例部分,分析了高并发Web服务和云服务环境下负载
【Delphi性能调优】:加速进度条响应速度的10项策略分析

# 摘要
本论文首先概述了信号定位技术的基本概念和重要性,随后深入分析了三角测量和指纹定位两种主要技术的工作原理、实际应用以及各自的优势与不足。通过对三角测量定位模型的解析,我们了解到其理论基础、精度影响因素以及算法优化策略。指纹定位技术部分,则侧重于其理论框架、实际操作方法和应用场
【PID调试实战】:现场调校专家教你如何做到精准控制
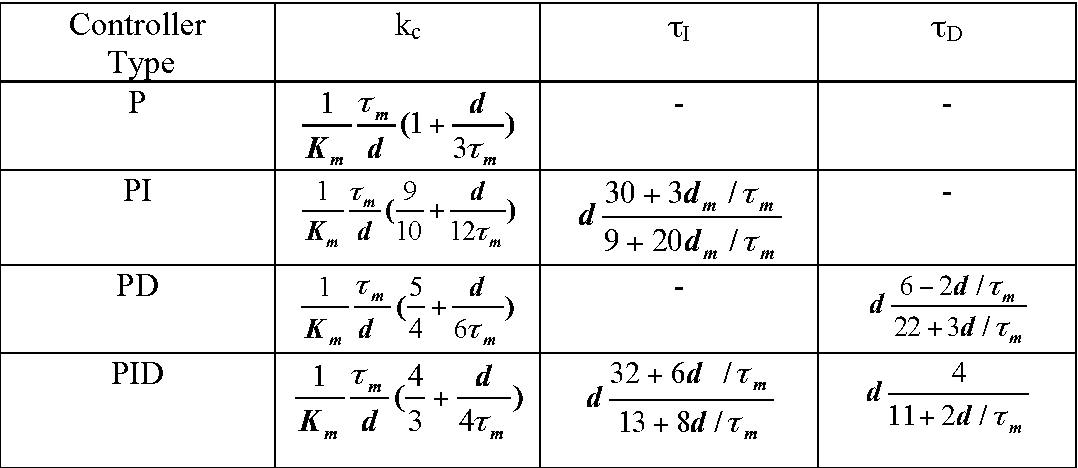
# 摘要
PID控制作为一种历史悠久的控制理论,一直广泛应用于工业自动化领域中。本文从基础理论讲起,详细分析了PID参数的理论分析与选择、调试实践技巧,并探讨了PID控制在多变量、模糊逻辑以及网络化和智能化方面的高级应用。通过案例分析,文章展示了PID控制在实际工业环境中的应用效果以及特殊环境下参数调整的策略。文章最后展望了PID控制技术的发展方
网络同步新境界:掌握G.7044标准中的ODU flex同步技术
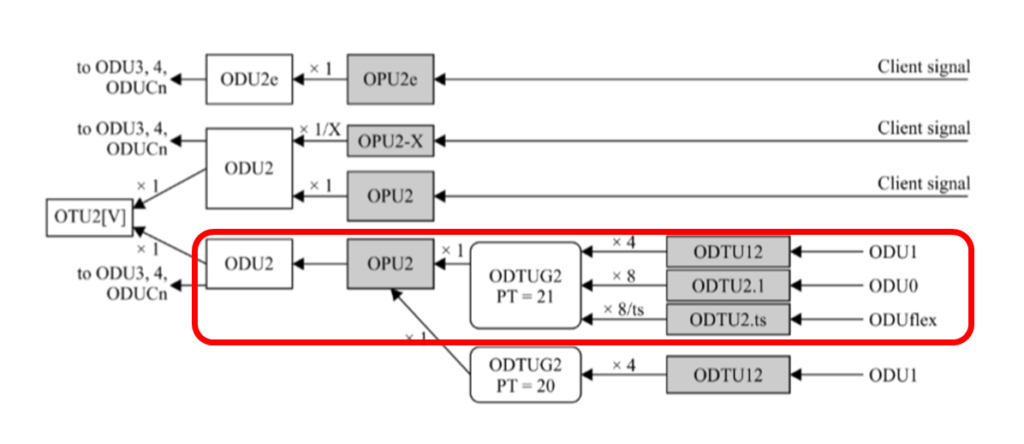
# 摘要
本文详细探讨了G.7044标准与ODU flex同步技术,首先介绍了该标准的技术原理,包括时钟同步的基础知识、G.7044标准框架及其起源与应用背景,以及ODU flex技术
字符串插入操作实战:insert函数的编写与优化
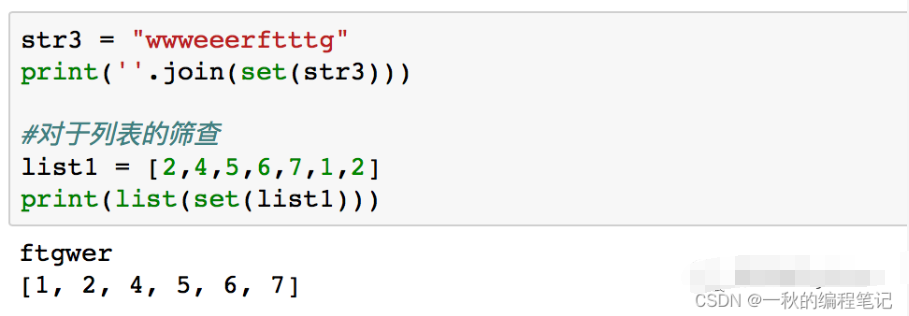
# 摘要
字符串插入操作是编程中常见且基础的任务,其效率直接影响程序的性能和可维护性。本文系统地探讨了字符串插入操作的理论基础、insert函数的编写原理、使用实践以及性能优化。首先,概述了insert函数的基本结构、关键算法和代码实现。接着,分析了在不同编程语言中insert函数的应用实践,并通过性能测试揭示了各种实现的差异。此外,本文还探讨了性能优化策略,包括内存使用和CPU效率提升,并介绍了高级数据结
环形菜单的兼容性处理

# 摘要
环形菜单作为一种用户界面元素,为软件和网页设计提供了新的交互体验。本文首先介绍了环形菜单的基本知识和设计理念,重点探讨了其通过HTML、CSS和JavaScript技术实现的方法和原理。然后,针对浏览器兼容性问题,提出了有效的解决方案,并讨论了如何通过测试和优化提升环形菜单的性能和用户体验。本
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )