多人同步:异步编程模型的原理和实践
发布时间: 2023-12-15 15:48:54 阅读量: 48 订阅数: 47 
# 1. 引言
## 1.1 现代计算机系统中的并发性挑战
在现代计算机系统中,每个应用程序都需要处理多个任务并发执行的情况。这种并发性带来了很多挑战,如竞态条件、死锁、资源争用等问题。传统的同步编程模型无法很好地处理这些并发性挑战,导致程序性能下降,可维护性变差。
## 1.2 异步编程模型的概念和意义
异步编程模型是一种基于事件驱动的编程模式,能够有效地解决并发性挑战。它将任务的执行与结果的处理分离开来,通过回调函数或者异步协程等方式,允许任务在后台执行,不阻塞主线程或其他任务的执行。这种模型能够提高系统的并发性能,并显著降低资源的利用率。
## 1.3 本文的目的和结构
本文旨在深入探讨异步编程模型的原理和实践,在多人同步场景下的应用。文章将从异步编程模型的基础开始讲起,介绍其定义、区别以及优势与局限性。接着,我们将解释多线程同步的原理,包括共享资源问题、互斥锁、临界区、信号量和条件变量的作用与使用,以及避免死锁和竞态条件的技术。然后,我们将深入探讨异步编程模型的实践,包括回调函数的使用与注意事项、Promise和Future的概念及使用示例、协程和生成器的异步编程实现,以及异步编程框架的介绍与比较。接下来,我们将分享异步编程的最佳实践,包括选择合适的异步编程模型、错误处理和异常处理策略、性能调优和资源管理技巧,以及线程池和任务队列的优化。最后,我们将总结文章的主要观点,探讨异步编程模型对多人同步的影响,并展望其未来发展方向。
## 2. 异步编程模型基础
在本章中,我们将介绍异步编程模型的基础知识。首先,我们会定义和区分同步和异步的概念。然后,我们会介绍几种常见的异步编程模型,并讨论它们的优势和局限性。
### 2.1 同步和异步的定义和区别
在计算机编程中,同步和异步是描述任务执行方式的术语。
同步任务是按照顺序依次执行的任务,每个任务的执行必须等待上一个任务的完成。在同步编程模型中,任务的执行结果必须立即返回,否则会阻塞程序的执行。
异步任务是并发执行的任务,每个任务都是独立的,不需要等待其他任务的完成。在异步编程模型中,任务的执行结果可以延迟返回,不会阻塞程序的执行。
同步和异步的区别在于任务执行的方式和结果的返回时间。同步任务的执行顺序固定且结果即时返回,而异步任务的执行顺序不确定且结果可以延迟返回。
### 2.2 常见的异步编程模型
在实际的编程中,有多种方式可以实现异步编程。
#### 2.2.1 回调函数
回调函数是一种常见的异步编程模型。在这种模型中,任务的结果通过回调函数来处理。当任务完成时,会调用事先注册好的回调函数来处理结果。
下面是一个使用回调函数的示例代码:
```python
import requests
def callback(response):
print(response.text)
def send_request(url, callback):
requests.get(url, callback=callback)
send_request('https://example.com', callback)
```
在上面的例子中,`send_request`函数发起了一个网络请求,并在请求完成后调用`callback`函数来处理结果。这种方式可以在网络请求完成后继续执行其他的任务,不会阻塞程序的执行。
#### 2.2.2 Promise和Future
Promise和Future是一种更高级的异步编程模型,主要用于处理多个异步任务的组合。
Promise表示一个异步操作的最终结果,当异步操作完成时,Promise会被标记为完成状态,并返回结果。Future则是Promise的扩展,表示一个异步操作的未来结果。Future可以用来等待异步操作的完成,并获取最终结果。
下面是一个使用Promise和Future的示例代码:
```java
import java.util.concurrent.CompletableFuture;
public class FutureExample {
public static void main(String[] args) {
CompletableFuture<String> future = CompletableFuture.supplyAsync(() -> {
// 异步任务的实现
return "Hello, World!";
});
future.thenAccept(result -> {
// 异步任务完成后的回调函数
System.out.println(result);
});
}
}
```
在上面的例子中,我们使用`CompletableFuture`类创建一个异步任务,并在任务完成后调用`thenAccept`方法来处理结果。
#### 2.2.3 协程和生成器
协程和生成器是一种更灵活的异步编程模型,主要用于处理复杂的异步逻辑。
协程是一种轻量级的线程,可以在执行过程中挂起和恢复。生成器函数则是一种可以返回多个值的函数。结合协程和生成器,可以轻松实现复杂的异步逻辑。
下面是一个使用协程和生成器的示例代码:
```python
import asyncio
async def async_operation():
# 异步操作的实现
await asyncio.sleep(1)
return 'Async operation result'
async def main():
result = await async_operation()
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏以“多人同步”为主题,旨在探讨多人协同操作时的基础概念、常见问题和解决方案,以及并发编程的原理和实践。首先介绍了线程和进程的区别与应用,深入讨论了锁的使用与性能优化,以及信号量、条件变量和互斥量的原理和应用。随后从事件驱动编程、异步编程模型、消息队列、进程间通信、共享内存等多个角度探讨了多人同步的技术选型和高效利用。同时,还聚焦于分布式系统中的同步问题、数据一致性保证、数据版本控制、分布式锁的实现与应用,以及并行计算的基本原理。通过全面的内容涵盖,旨在帮助读者深入理解多人同步的技术原理,掌握相应的实践技巧,并在实际工作中有效解决多人协同操作的挑战。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
解决组合分配难题:偏好单调性神经网络实战指南(专家系统协同)

# 摘要
本文旨在探讨解决组合分配难题的方法,重点关注偏好单调性理论在优化中的应用以及神经网络的实战应用。文章首先介绍了偏好单调性的定义、性质及其在组合优化中的作用,接着深入探讨了如何
WINDLX模拟器案例研究:3个真实世界的网络问题及解决方案
# 摘要
本文对WINDLX模拟器进行了全面概述,并深入探讨了网络问题的理论基础与诊断方法。通过对比OSI七层模型和TCP/IP模型,分析了网络通信中常见的问题及其分类。文中详细介绍了网络故障诊断技术,并通过案例分析方法展示了理论知识在实践中的应用。三个具体案例分别涉及跨网络性能瓶颈、虚拟网络隔离失败以及模拟器内网络服务崩溃的背景、问题诊断、解决方案实施和结果评估。最后,本文展望了W
【FREERTOS在视频处理中的力量】:角色、挑战及解决方案

# 摘要
FreeRTOS在视频处理领域的应用日益广泛,它在满足实时性能、内存和存储限制、以及并发与同步问题方面面临一系列挑战。本文探讨了FreeRTOS如何在视频处理中扮演关键角色,分析了其在高优先级任务处理和资源消耗方面的表现。文章详细讨论了任务调度优化、内存管理策略以及外设驱动与中断管理的解决方案,并通过案例分析了监控视频流处理、实时视频转码
ITIL V4 Foundation题库精讲:考试难点逐一击破(备考专家深度剖析)
# 摘要
ITIL V4 Foundation作为信息技术服务管理领域的重要认证,对从业者在理解新框架、核心理念及其在现代IT环境中的应用提出了要求。本文综合介绍了ITIL V4的考试概览、核心框架及其演进、四大支柱、服务生命周期、关键流程与功能以及考试难点,旨在帮助考生全面掌握ITIL V4的理论基础与实践应用。此外,本文提供了实战模拟
【打印机固件升级实战攻略】:从准备到应用的全过程解析

# 摘要
本文综述了打印机固件升级的全过程,从前期准备到升级步骤详解,再到升级后的优化与维护措施。文中强调了环境检查与备份的重要性,并指出获取合适固件版本和准备必要资源对于成功升级不可或缺。通过详细解析升级过程、监控升级状态并进行升级后验证,本文提供了确保固件升级顺利进行的具体指导。此外,固件升级后的优化与维护策略,包括调整配置、问题预防和持续监控,旨在保持打印机最佳性能。本文还通过案
【U9 ORPG登陆器多账号管理】:10分钟高效管理你的游戏账号

# 摘要
本文详细探讨了U9 ORPG登陆器的多账号管理功能,首先概述了其在游戏账号管理中的重要性,接着深入分析了支持多账号登录的系统架构、数据流以及安全性问题。文章进一步探讨了高效管理游戏账号的策略,包括账号的组织分类、自动化管理工具的应用和安全性隐私保护。此外,本文还详细解析了U9 ORPG登陆器的高级功能,如权限管理、自定义账号属性以及跨平台使用
【编译原理实验报告解读】:燕山大学案例分析
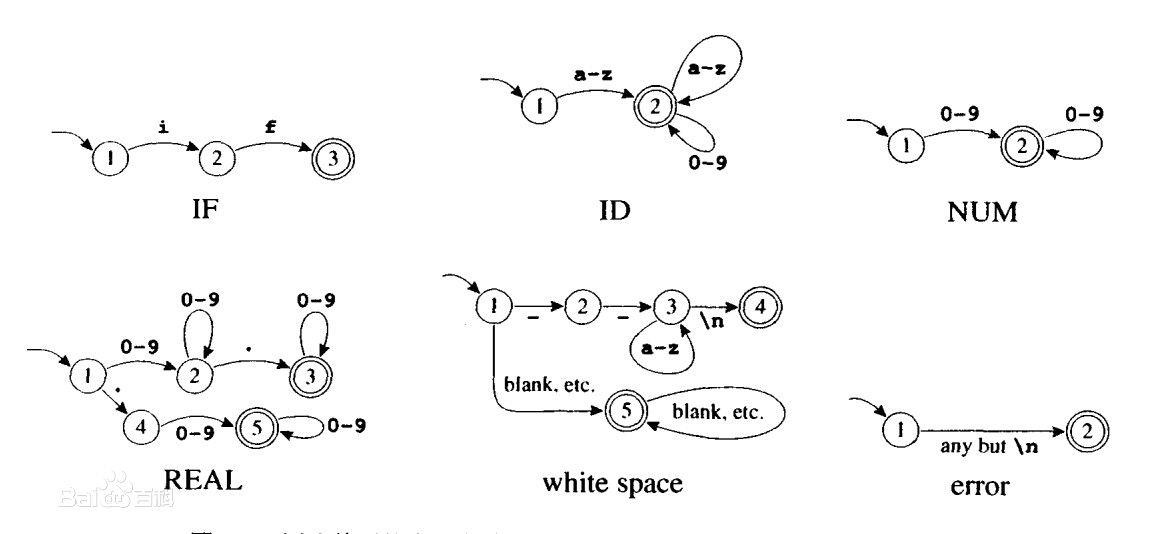
# 摘要
本文是关于编译原理的实验报告,首先介绍了编译器设计的基础理论,包括编译器的组成部分、词法分析与语法分析的基本概念、以及语法的形式化描述。随后,报告通过燕山大学的实验案例,深入分析了实验环境、工具以及案例目标和要求,详细探讨了代码分析的关键部分,如词法分析器的实现和语法分析器的作用。报告接着指出了实验中遇到的问题并提出解决策略,最后展望了编译原理实验的未来方向,包括最新研究动态和对
【中兴LTE网管升级与维护宝典】:确保系统平滑升级与维护的黄金法则

# 摘要
本文详细介绍了LTE网管系统的升级与维护过程,包括升级前的准备工作、平滑升级的实施步骤以及日常维护的策略。文章强调了对LTE网管系统架构深入理解的重要性,以及在升级前进行风险评估和备份的必要性。实施阶段,作者阐述了系统检查、性能优化、升级步骤、监控和日志记录的重要性。同时,对于日常维护,本文提出监控KPI、问题诊断、维护计划执行以及故障处理和灾难恢复措施。案例研究部分探讨了升级维护实践中的挑战与解决方案。最后,文章展望了LT
故障诊断与问题排除:合泰BS86D20A单片机的自我修复指南
# 摘要
本文系统地介绍了故障诊断与问题排除的基础知识,并深入探讨了合泰BS86D20A单片机的特性和应用。章节二着重阐述了单片机的基本概念、硬件架构及其软件环境。在故障诊断方面,文章提出了基本的故障诊断方法,并针对合泰BS86D20A单片机提出了具体的故障诊断流程和技巧。此外,文章还介绍了问题排除的高级技术,包括调试工具的应用和程序自我修复技术。最后,本文就如何维护和优化单片
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )