模糊控制方法:处理非精确模型与不确定性
发布时间: 2024-01-18 02:10:48 阅读量: 87 订阅数: 51 

模糊控制
# 1. 引言
## 1.1 研究背景
在现代社会中,控制系统的设计与优化一直是一个重要的研究领域。随着科学技术的不断发展和应用的广泛推广,传统的控制方法逐渐暴露出无法满足复杂、非线性系统控制需求的问题。因此,研究人员开始探索新的控制方法,以应对现实世界中复杂、不确定的系统。
## 1.2 研究意义
模糊控制作为一种有效处理非精确模型和不确定性的控制方法,逐渐受到研究人员的关注。它能够利用模糊集合和模糊推理的理论,通过模糊控制规则实现系统的自适应调节,使系统具有较强的鲁棒性和适应性。
模糊控制在工业过程、智能交通系统和智能机器人等领域中具有广泛的应用前景。通过模糊控制,可以提高工业生产过程的稳定性和效率,优化交通流量调度,实现高效智能的机器人操作等。
本文将详细介绍模糊控制的基本原理和系统结构,以及处理非精确模型和不确定性的方法。同时还将介绍模糊控制方法在工业过程、智能交通系统和智能机器人等应用领域中的具体案例。最后,总结研究成果,并展望模糊控制方法在未来的发展方向和面临的挑战。
# 2. 模糊控制介绍
模糊控制是一种基于模糊逻辑和模糊集合理论的控制方法,用于处理复杂系统中的非线性、不确定性和模糊性问题。它通过建立模糊规则来模拟人类专家的经验知识,实现对系统行为的控制。
### 2.1 模糊控制基本原理
模糊控制的基本原理是将输入、输出和规则都用模糊集合来表示,通过模糊推理来确定输出的模糊集合,并将其映射到实际的控制。模糊控制主要包括模糊化、模糊推理和去模糊化三个步骤。
- 模糊化:将输入量和输出量转换为模糊集合,通过隶属度函数描述其隶属度。
- 模糊推理:根据已知的模糊规则,将模糊输入通过模糊逻辑运算得到模糊输出。
- 去模糊化:通过去模糊化方法将模糊输出转换为实际的控制信号。
### 2.2 模糊控制系统的结构
模糊控制系统由模糊化部分、模糊推理部分和去模糊化部分组成。
- 模糊化部分:将模糊控制系统的输入转换为模糊集合,通常使用隶属度函数来描述输入量的隶属度。
- 模糊推理部分:根据已知的模糊规则,将模糊输入通过模糊逻辑运算得到模糊输出。
- 去模糊化部分:通过去模糊化方法将模糊输出转换为实际的控制信号。
### 2.3 模糊推理与模糊控制规则
模糊推理是模糊控制中的核心过程,它通过模糊逻辑运算来推导出控制系统的输出。模糊控制规则是描述输入与输出之间的关系的规则集合,通常由专家经验知识形成。模糊推理可以基于模糊控制规则通过模糊逻辑运算得到模糊输出。
模糊推理主要有两种方法:基于模糊关系矩阵的推理和基于模糊推理机的推理。基于模糊关系矩阵的推理通过模糊关系矩阵表示输入与输出之间的关系,通过矩阵运算得到模糊输出。而基于模糊推理机的推理通过模糊推理机的推理规则来进行模糊推理。
模糊控制系统的设计需要构建合适的模糊规则,并进行模糊推理来获得系统的输出。模糊控制方法在处理非线性、不确定性和模糊性问题方面有着广泛的应用。
# 3. 处理非精确模型的方法
在实际控制系统中,往往难以获得系统的精确数学模型,这给控制系统的设计和实现带来了挑战。本章将介绍处理非精确模型的方法,包括系统辨识技术和模糊辨识技术。
#### 3.1 系统辨识技术
系统辨识旨在根据给定的输入和输出数据,估计系统的数学模型,其基本思想是通过已知的输入和输出数据,推导出系统的数学模型,以便进行系统分析与控制设计。系统辨识技术主要包括基于样本数据的辨识方法和基于模型结构的辨识方法。
##### 3.1.1 基于样本数据的辨识方法
基于样本数据的辨识方法通过采集系统的输入和输出数据,并利用数据分析的手段,如最小二乘法、系统辨识工具箱等,对系统进行建模和辨识。常见的方法包括离散时间系统的辨识和连续时间系统的辨识。
```python
# Python示例代码 - 基于样本数据的离散时间系统辨识
import numpy as np
import scipy.signal as signal
# 生成
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏以“自动控制原理详解:控制系统建模与控制算法设计”为主题,系统探讨了自动控制领域的核心知识和技术。首先,通过“入门指南:自动控制原理的概述与基础”,带领读者了解控制理论的基本概念和原理。随后,深入“理解信号与系统:控制系统中的信号与频域分析”,讲解信号处理与频域分析在控制系统中的应用。同时,“数学建模基础:从微分方程到传递函数”以及“系统建模方法:传递函数与状态空间模型的转换”帮助读者掌握系统建模的关键技术。除此之外,“PID控制算法:原理与实现”、“模糊控制方法:处理非精确模型与不确定性”等多篇文章详细介绍了各类控制算法的原理与应用。总之,本专栏全面解析了自动控制原理,从基础概念到前沿技术,涵盖了控制系统建模与各种控制算法的设计,适合广大控制工程师和学习者深入学习与研究。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
CanDiva集成解决方案:实现与其他系统无缝连接

# 摘要
CanDiva集成解决方案是一个综合性的系统集成框架,旨在优化数据流管理和技术架构设计。本文首先概述了CanDiva的集成理论基础和实践案例,包括系统集成的概念、发展趋势、技术架构、数据管理和集成过程中的关键因素。其次,文章深入探讨了CanDiva集成的成功实践案例,并分析了实施步骤、解决方案部署以及关键成功因素。
【CUDA与GPU编程】:在Visual Studio中打造强大计算平台的秘诀

# 摘要
本文旨在为读者提供CUDA与GPU编程的系统性指导,从基础概念到实际项目应用的全过程。首先,概述了CUD
AS2.0兼容性危机:如何解决与Flash Player的那些事儿
# 摘要
本文对AS2.0和Flash Player的历史背景进行了回顾,并深入分析了AS2.0的兼容性问题,包括功能性与环境兼容问题的分类及其根本原因
科研必备:MATLAB在二维热传导方程研究中的应用与高级技巧
# 摘要
本文首先介绍了MATLAB在热传导方程研究中的应用,从基础理论讲起,深入探讨了二维热传导方程的数
Pilot Pioneer Expert V10.4故障排除速成课:常见问题与解决方法全攻略

# 摘要
Pilot Pioneer Expert V10.4是一款功能全面的软件,本文旨在概述其基本功能和安装配置。接着,文章深入探讨了软件故障诊断的基础理论,涵盖故障的定义、分类及诊断方法,并介绍了常见软件问题及其排除工具。本文还详细介绍了故障诊断的技巧,包括分析日志文件、性能监控与优化,以及提供了一系列实
RH2288 V2 BIOS固件更新流程:自动化与手动操作的全面解读
# 摘要
本文全面介绍了RH2288 V2服务器BIOS固件更新的策略和方法,包括手动更新流程和自动化更新技术。首先概述了BIOS固件更新的重要性,并指导如何进行准备工作、执行更新和验证。接着深入探讨了自动化更新的优势、策略制定和脚本实现。本文还通过实践案例分析了不同环境下更新策略的对比和风险评估,强调了更新后系统优化与监控的重要性。最后展望了固件更新技术的未来趋势,
FPGA布局必杀技:从零开始,Altium Designer中的布局到优化指南

# 摘要
本文全面探讨了FPGA布局的基础知识、工具使用、实战演练、优化技巧及案例分析。从布局工具Altium Designer的详细介绍开始,深入到基本电路设计、高级布局技巧,以及布局优化与验证的各个方面。文章详细阐述了信号完整性分析、热管理优化以及布局后的验证与测试,旨
HBR3高速连接技术解析:DisplayPort 1.4带你进入快车道
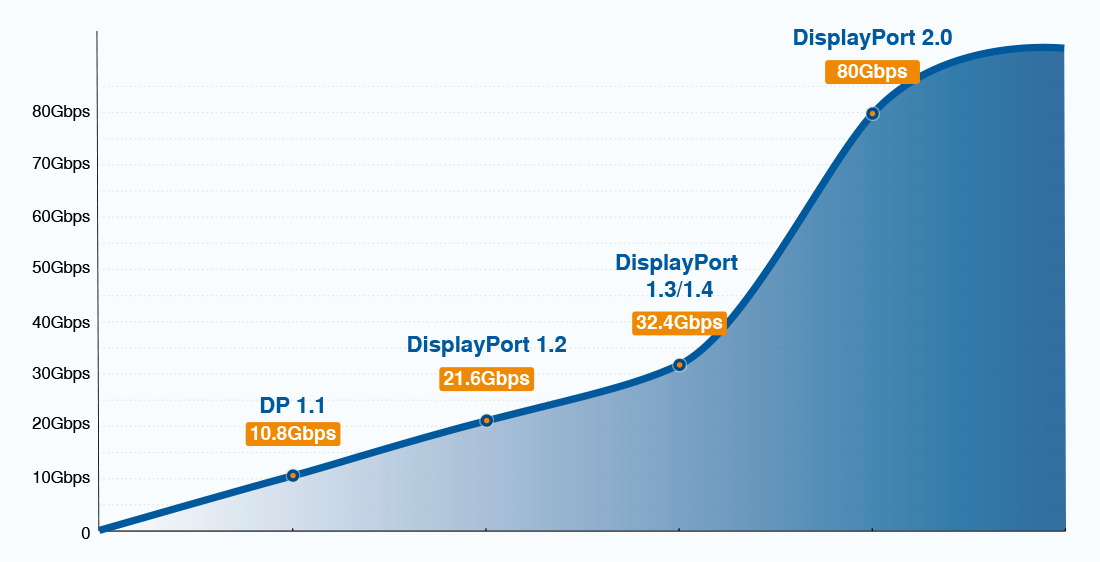
# 摘要
HBR3高速连接技术和DisplayPort 1.4技术标准是现代显示技术的两大支柱,为高端显示器和便携设备提供了先进的连接与显示解决方案。HBR3技术以其高带宽传输的特性在DisplayPort 1.4中得到应用,支持8K视频和HDR,增强了显示流压缩技术。本文详细解读DisplayPort 1.4技术标准,并探讨其在不同应用场景中的
【SPEL+Ref75性能优化】:5大策略助你深度调优SPEL应用性能
# 摘要
随着SPEL(Spring Expression Language)在企业级应用中的广泛应用,其性能优化变得日益重要。本文对SPEL的性能瓶颈进行了深入分析,涵盖了工作原理、性能问题的成因,以及系统资源竞争等多个方面。针对常见的性能瓶颈,本文提出了一系列优化策略,包括代码级别的改进、系统资源配置的优化、并发与同步机制的调整,以及监控与故障排查的方法。通过实际案例,本文详细阐述了每种策略的具
Bootloader开发零基础教程:雅特力MCU AT32F403项目从启动到完成的全过程

# 摘要
本文提供了对Bootloader开发的全面介绍,涵盖从基础理论到深入开发实践的各个方面。首先介绍了Bootloader的概念、作用及其与操作系统的关系,随后详细阐述了其启动流程和结构组件,包括系统复位、初始化以及主要功能模块和硬件抽象层。本文还指导如何搭建开发工具和环境,并且实践
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )