C++游戏物理引擎性能调优:【物理计算的5大优化方法】
发布时间: 2024-12-09 16:01:23 阅读量: 11 订阅数: 11 

visual c++ vc得到物理内存使用情况.zip

# 1. C++游戏物理引擎性能调优概述
游戏物理引擎是现代游戏开发中不可或缺的一部分,它负责模拟游戏世界中物体的运动、碰撞以及相应的物理反应。随着游戏图形和交互性的不断提升,物理引擎的性能调优变得尤为重要。本章将概述C++游戏物理引擎性能调优的重要性、方法和可能面临的挑战。
性能调优不仅仅是代码层面的优化,更是对物理模拟精度与计算资源之间平衡的艺术。调优的终极目标是在尽可能少的资源消耗下,实现物理效果的真实性、准确性和流畅性。这要求开发者具备扎实的C++编程基础、深入了解物理引擎内部机制,以及对游戏运行时的需求有精确的把控。
在后续章节中,我们将深入探讨物理引擎的核心组件,如碰撞检测与响应系统、动力学模拟与刚体系统,以及影响物理计算精度与稳定性的因素。通过对这些理论和技术的深入剖析,我们可以为物理引擎的性能调优打下坚实的基础。
# 2. 物理引擎的理论基础
物理引擎是游戏开发中模拟现实物理规律的软件组件。理解其理论基础对性能调优至关重要,因为只有深刻理解了物理引擎的工作原理,才能有效地诊断问题并实施针对性的优化策略。
## 2.1 物理引擎核心组件解析
### 2.1.1 碰撞检测与响应系统
碰撞检测是物理引擎中确认两个物体是否接触的技术。它不仅涉及几何形状的检测,还包括物体间可能的接触点与接触面的判定。碰撞响应系统负责在检测到碰撞后,根据物理法则计算力的作用和物体的运动状态变化。
碰撞检测的精确性直接影响物理模拟的可信度,但同时它也是计算密集型的任务。因此,碰撞检测算法的性能优化是提高物理引擎效率的关键。
```c++
// 简单的碰撞检测伪代码示例
bool isColliding(Object a, Object b) {
// 碰撞检测逻辑,判断a和b是否有交集
// 返回值为true表示发生碰撞,false表示未发生碰撞
}
```
### 2.1.2 动力学模拟与刚体系统
动态模拟是物理引擎中模拟物体运动和力的作用的部分,核心在于牛顿运动定律。刚体系统是动态模拟的基础,它假定物体在受到外力作用下形状和体积保持不变。刚体系统要处理多个相互作用的刚体,计算它们的线速度、角速度以及受力情况。
```c++
// 物体类的基本结构,包含动态模拟所需的状态变量
class RigidBody {
public:
Vector3 position;
Vector3 velocity;
Vector3 angularVelocity;
Matrix3x3 inertiaTensor;
// ... 其他物理属性和方法 ...
};
```
## 2.2 物理模拟的数学原理
### 2.2.1 线性代数在物理引擎中的应用
物理引擎在模拟过程中广泛运用线性代数来处理向量和矩阵运算,如位置、速度和加速度的表示,以及刚体的旋转矩阵和惯性张量计算。线性代数是物理引擎中不可或缺的组成部分,特别是在处理3D空间中的物体运动时。
```c++
// 使用线性代数进行位置更新的简单示例
void updatePosition(RigidBody& body, float deltaTime) {
Vector3 acceleration = body.force / body.mass; // 计算加速度
body.velocity += acceleration * deltaTime; // 速度更新
body.position += body.velocity * deltaTime; // 位置更新
}
```
### 2.2.2 微积分与刚体运动方程
微积分是动态模拟中处理连续变化的数学工具,特别是在求解刚体运动方程时。导数和积分在物理模拟中分别代表速度和位移,通过微积分可以将物体的运动状态从一个时刻连续地变化到另一个时刻。
```mathematica
(* Mathematica 中使用微积分求解位移的例子 *)
position[t_] := Integrate[velocity[t], {t, 0, t}]
```
## 2.3 物理计算的精度与稳定性
### 2.3.1 浮点数精度问题及其影响
物理模拟中经常使用浮点数来存储和计算物体的位置、速度等属性。然而,浮点数的精度问题可能导致能量守恒误差,模拟过程中的累积误差也可能导致模拟结果的不稳定或不准确。
```c++
// 示例:浮点数精度问题的影响分析
void simulatePhysics(float deltaTime) {
float position = 0.0f;
float velocity = 0.1f;
for (int i = 0; i < 1000; i++) {
position += velocity * deltaTime; // 累积误差可能导致不精确的位置计算
}
// 输出最终位置,可能会显示出误差
}
```
### 2.3.2 时间步长选择与数值稳定性
在物理引擎中,时间步长的选择对数值稳定性有极大影响。较小的时间步长可以提高模拟的准确性,但会增加计算量。相对地,较大的时间步长会减少计算量,但可能导致数值不稳定性。因此,需要根据具体情况进行平衡选择。
```c++
// 示例:时间步长选择对稳定性的影响
void chooseTimestep() {
float timestep = 0.016f; // 选择合适的时间步长
if (timestep < MIN_TIMESTEP) {
timestep = MIN_TIMESTEP; // 避免步长过小
} else if (timestep > MAX_TIMESTEP) {
timestep = MAX_TIMESTEP; // 避免步长过大
}
// 使用选定的时间步长进行物理更新
}
```
在本章节中,我们深入探讨了物理引擎的核心组件、理论基础和数学原理,同时强调了物理计算中的精度与稳定性问题。通过对这些基础理论的理解,开发者可以更好地进行性能调优,从而确保物理引擎在游戏中提供真实可信且高效的物理模拟。
# 3. 物理计算的优化技术
物理计算是游戏开发中的核心环节,它直接关系到游戏的流畅度和真实感。随着游戏画面和模拟环境复杂度的增加,物理计算对性能的需求也越来越大。本章节将详细介绍针对物理计算过程中的优化技术,包括碰撞检测的优化策略、动力学计算的算法优化、以及利用多线程和并行计算来提升性能。
## 3.1 碰撞检测的优化策略
碰撞检测是物理引擎中最频繁且计算量最大的部分之一。在实时应用中,如游戏或虚拟现实,高效的碰撞检测对保持高性能至关重要。以下两种技术是常见的碰撞检测优化策略:
### 3.1.1 空间分割技术:八叉树与边界体积层次结构(BVH)
空间分割技术能够将三维空间划分为多个小区域,以便只在可能相互作用的对象所在的区域进行碰撞检测计算。八叉树和BVH是两种广泛使用的空间分割方法。
八叉树是一种树形数据结构,将三维空间递归地分割为八个象限。每个节点代表一个空间区域,如果一个区域包含对象,则该节点包含指向其子区域或对象的指针。通过检查树的最低层次上相邻节点的潜在交互,可以大大减少必须检查的碰撞对数量。
```cpp
// 简化的八叉树节点结构
struct OctreeNode {
BoundingBox bounds;
vector<OctreeNode*> children;
vector<PhysicsObject*> objects;
OctreeNode* parent;
bool isLeaf() {
return children.empty();
}
};
// 简化的八叉树创建和碰撞检测伪代码
void createOctree(OctreeNode* node, vector<PhysicsObject*>& objects) {
// ... 分割空间并分配对象到子节点 ...
}
bool checkCollisions(OctreeNode* node) {
if (node->isLeaf()) {
// ... 检查此节点内对象的碰撞 ...
return false;
}
for (auto child : node->children) {
if (checkCollisions(
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《C++游戏性能分析与调优方法》专栏深入探讨了游戏开发中至关重要的性能优化技术。从入门者必备的基础工具和技巧,到内存泄漏预防和CPU-GPU协同优化,专栏全面涵盖了游戏性能分析和调优的各个方面。
专栏提供了实用的编码实践,以提升执行效率,并探讨了资源管理优化策略,以平衡加载时间和内存占用。此外,它深入分析了图形管线优化、异步编程、物理引擎调优、音频性能优化和AI性能优化等关键领域。
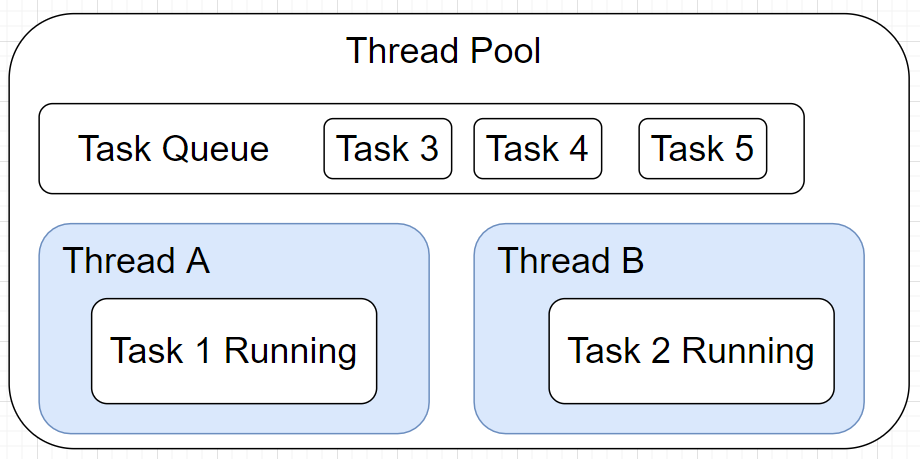
通过对网络性能、动态内存管理、线程池使用和缓存优化等主题的深入探讨,该专栏为游戏开发者提供了全面且实用的指南,帮助他们识别和解决性能瓶颈,提升游戏响应性、流畅性和整体用户体验。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
GT-POWER网格划分技术提升:模型精度与计算效率的双重突破

参考资源链接:[GT-POWER基础培训手册](https://wenku.csdn.net/doc/64a2bf007ad1c22e79951b5
【MAC版SAP GUI快捷键大全】:提升工作效率的黄金操作秘籍

参考资源链接:[MAC版SAP GUI快速安装与配置指南](https://wenku.csdn.net/doc/6412b761be7fbd1778d4a168?spm=1055.2635.3001.10343)
# 1. MAC版SAP GUI简介与安装
## 简介
SAP GUI(Graphical User Interface)是访问SAP系统
【隧道设计必修课】:FLAC3D网格划分与本构模型选择实用技巧
参考资源链接:[FLac3D计算隧道作业](https://wenku.csdn.net/doc/6412b770be7fbd1778d4a4c3?spm=1055.2635.3001.10343)
# 1. FLAC3D简介与应用基础
在本章中,我们将为您介绍FLAC3D(Fast Lagrangian Analysis of Continua in 3 Dimensions)的基础知识以及如何在工程
【故障诊断】:扭矩控制常见问题的西门子1200V90解决方案

参考资源链接:[西门子V90PN伺服驱动参数读写教程](https://wenku.csdn.net/doc/6412b76abe7fbd1778d4a36a?spm=1055.2635.3001.10343)
# 1. 扭矩控制概念与西门子1200V90介绍
在自动化与精密工程领域中,扭矩控制是实现设备精确
【Android设备安全必备】:Unknown PIN问题的彻底解决方案
参考资源链接:[unknow PIn解决方案](https://wenku.csdn.net/doc/6412b731be7fbd1778d496d4?spm=1055.2635.3001.10343)
# 1. Unknown PIN问题概述
## 1.1 问题的定义与重要性
Unknown PIN问题通常指用户在忘记或错误输入设备_PIN码后,导致设备锁定,无
【启动速度翻倍】:提升Java EXE应用性能的10大技巧
参考资源链接:[Launch4j教程:JAR转EXE全攻略](https://wenku.csdn.net/doc/6401aca7cce7214c316eca53?spm=1055.2635.3001.10343)
# 1. Java EXE应用性能概述
Java作为广泛使用的编程语言,其应用程序的性能直接影响用户体验和系统的稳定性。Java EXE应用是指那些通过特定打包工具(如Launc
Python Requests高级技巧大揭秘:动态请求头与Cookies管理

参考资源链接:[python requests官方中文文档( 高级用法 Requests 2.18.1 文档 )](https://wenku.csdn.net/doc/646c55d4543f844488d076df?spm=1055.2635.3001.10343)
# 1. 动态请求头与Cookies管理基础
## 1.1 互联网通信
iOS实时视频流传输秘籍:构建无延迟的直播系统
参考资源链接:[iOS平台视频监控软件设计与实现——基于rtsp ffmpeg](https://wenku.csdn.net/doc/4tm4tt24ck?spm=1055.2635.3001.10343)
# 1. 实时视频流传输基础
## 1.1 视频流传输的核心概念
- 视频流传输是构建实时直播系统的核心技术之一,涉及到对视频数据的捕捉、压缩、传输和解码等环节。掌握这些基本概念对于实现高质量
【绘制软件大比拼】:AutoCAD与其它工具在平断面图中的真实对决

参考资源链接:[输电线路设计必备:平断面图详解与应用](https://wenku.csdn.net/doc/6dfbvqeah6?spm=1055.2635.3001.10343)
# 1. 绘制软件大比拼概览
绘制软件领域竞争激烈,为满足不同用户的需求,各种工具应运而生。本章将为读者提供一个概览,介绍市场上流行的几款绘制软件及其主要功能,帮助您快速了解每款软件
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )