【Pixhawk自定义消息与MATLAB交互】:扩展通信协议的实战技巧
发布时间: 2024-11-15 12:06:21 阅读量: 21 订阅数: 28 

MATLAB散点图全指南:绘制、自定义与高级技巧
# 1. Pixhawk自定义消息概述
## 1.1 为什么需要自定义消息?
在进行无人机控制和数据采集任务时,标准的消息集可能无法满足特定应用场景的需求。因此,Pixhawk飞控系统允许开发者根据项目需求,创建自定义消息来交换专有的数据信息。这对于那些需要高度定制化的无人机项目至关重要,比如特定的遥感数据传输或是复杂的自动控制逻辑。
## 1.2 自定义消息的作用
自定义消息扩展了Pixhawk的通信协议,使得开发者可以传输任何结构化的数据。这对于实现如高级控制算法、非标准传感器数据的整合以及机载计算机之间的直接通信等功能尤为关键。开发者可以利用这些消息来优化飞行性能、增加安全性或者扩展新的功能。
## 1.3 自定义消息的类型
Pixhawk支持多种类型的消息,包括但不限于遥测、遥感以及控制命令。遥测消息可以包含飞行器的位置、速度等信息,而遥感消息可能包含特定传感器的输出。控制命令消息则可以用来发送改变飞行器行为的指令。通过扩展这些消息类型,开发者可以实现新的交互方式和更复杂的飞行任务。
# 2. 理论基础与通信协议扩展
### 2.1 Pixhawk开源飞控简介
#### 2.1.1 Pixhawk硬件架构
Pixhawk是一个开源硬件平台,它在飞行控制器领域内被广泛使用,以支持无人机、地面车辆、船只和机器人等自主系统的开发和应用。硬件架构是设计为可扩展和模块化的,以便它可以适应各种类型的应用和复杂性水平。
Pixhawk的核心是一个强大的处理器,通常是一个带有ARM核心的微控制器,具备足够的处理能力和内存来处理飞行控制算法,同时执行实时系统任务。飞行控制器还包括各种传感器,例如加速度计、陀螺仪、磁力计、GPS模块、压力传感器,以及用于控制电机和伺服机构的输出。
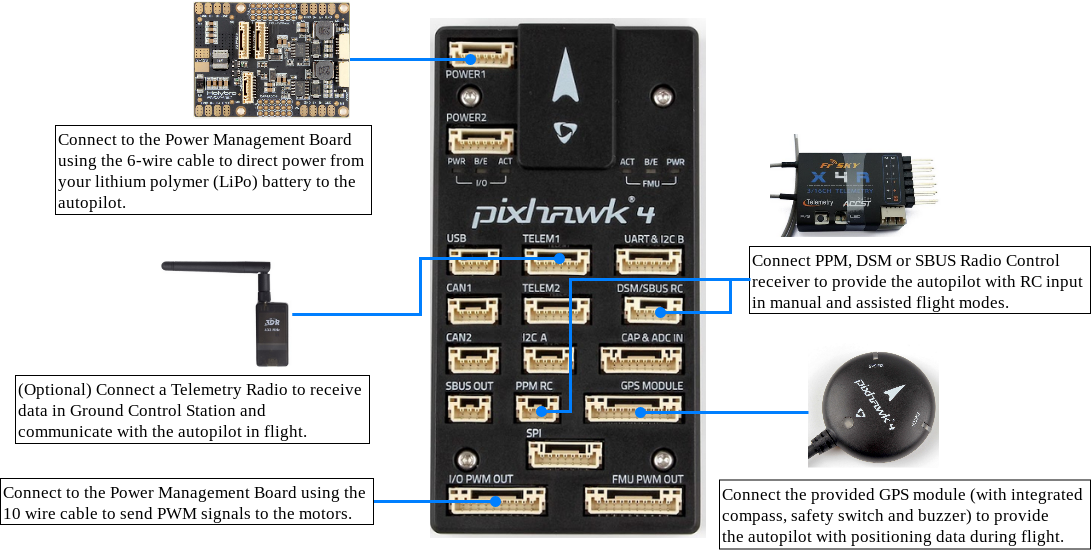
下图展示了Pixhawk飞控板的基本模块和连接接口:
```mermaid
graph TD;
A[Pixhawk Flight Control Board] -->|Sensors| B[Inertial Measurement Unit (IMU)];
A -->|GPS| C[GPS Module];
A -->|Power| D[Powersource];
A -->|Actuator| E[Motor Controller];
A -->|Telemetry| F[Telemetry Radio];
A -->|Compass| G[Magnetometer];
A -->|Control| H[RC Receiver];
```
从架构上说,Pixhawk设计上支持模块化扩展,用户可以通过添加各种外围模块来扩展飞行控制器的功能,例如传感器、无线通信模块和更多执行器。
#### 2.1.2 Pixhawk软件生态
Pixhawk的软件生态相当丰富,其核心是PX4或ArduPilot固件,这是两个广泛支持的开源飞控软件。这些固件为用户提供了完整的飞行控制系统,包括基本的飞行控制算法、导航系统、以及支持各种飞行模式的功能。
为了与Pixhawk交互,开发者经常使用QGroundControl,这是一个跨平台的地面控制站软件,它允许用户配置飞行控制器、监控飞行状态、进行任务规划和飞行测试等。此外,开发者还可以通过MAVLink协议与Pixhawk通信,这是一个轻量级的消息协议,用于与小型无人机进行通信。
### 2.2 通信协议的基本原理
#### 2.2.1 串行通信协议解析
串行通信是计算机与外围设备之间进行数据传输的一种方式,它通过单一的数据线来传送数据位。在Pixhawk飞控中,串行通信经常用于连接外部设备,例如GPS模块、遥控器接收机、以及用于调试和数据采集的串行设备。
串行通信依赖于几个关键的参数:波特率、数据位、停止位和校验位。这些参数定义了数据传输速率和格式,确保发送和接收设备之间能够正确地同步和解析数据。
```mermaid
graph LR;
A[Data Transmission] -->|Baud Rate| B[Bit Rate];
B -->|Data Bits| C[Data Transmission];
C -->|Stop Bits| D[Transmission End];
D -->|Parity| E[Error Detection];
```
在Pixhawk中,开发者可以通过改变这些参数来优化通信效率和保证数据传输的可靠性。例如,在高干扰的环境中增加校验位可以提高传输的准确率,而在稳定的环境中选择更高的波特率可以提高数据传输速率。
#### 2.2.2 自定义消息的通信机制
自定义消息是指开发者在标准消息类型之外,根据特定需求定义的消息类型。在Pixhawk和MAVLink通信协议中,支持开发者创建和使用自定义消息来扩展系统功能,传递特定的应用数据。
实现自定义消息通信机制首先需要定义消息的数据结构。然后,在Pixhawk的固件中嵌入消息处理逻辑,以确保消息能够被正确解析和处理。最后,应用层面需要有相应的程序来发送和接收自定义消息,以及对消息进行进一步的分析和使用。
### 2.3 扩展通信协议的方法
#### 2.3.1 消息定义和解析
当开发者需要与Pixhawk飞控进行更复杂的数据交换时,扩展MAVLink通信协议可能是必要的。MAVLink允许通过XML文件定义新的消息类型。这些文件包含了消息的ID、名称、字段、字段类型以及顺序等信息。
自定义消息的定义应当遵循MAVLink协议规则,确保定义的格式正确,字段类型和顺序正确,以便于Pixhawk能够解析和处理新消息。定义完成后,需要更新Pixhawk固件,以确保其能够识别和处理新消息。
下面是一个简单的自定义消息定义示例:
```xml
<mavlink>
<messages>
<message id="300" name="CUSTOM_MESSAGE">
<field type="uint64_t" name="timestamp">Timestamp (microseconds since system boot)</field>
<field type="uint8_t" name="sensor_status">Sensor status</field>
<!-- Add more fields as needed -->
</message>
</messages>
</mavlink>
```
通过这种方式,开发者可以为特定的应用创建新的通信机制,例如用于特定传感器数据的传输、执行器控制命令或系统状态信息。
#### 2.3.2 自定义消息的嵌入式处理
在Pixhawk固件中处理自定义消息需要开发者对飞行控制固件进行编程。这包括在适当的位置插入代码来解析和生成自定义消息。由于Pixhawk运行在嵌入式系统中,内存和处理资源有限,因此需要考虑效率和实时性。
下面是一个简单的伪代码示例,用于说明如何在Pixhawk固件中添加自定义消息处理逻辑:
```c
// 伪代码示例,非实际代码
void handleCustomMessage(mavlink_message_t* message) {
// 判断消息类型是否为自定义消息
if (message->msgid == MAVLINK_MSG_ID_CUSTOM_MESSAGE) {
// 解析自定义消息
mavlink_custom_message_t custom_msg;
mavlink_msg_custom_message_decode(message, &custom_ms
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了北京航空航天大学Pixhawk与MATLAB编程作业的各个方面。从Pixhawk硬件配置到MATLAB高级应用,再到数据融合、自主导航、优化控制、编程效率、故障诊断、任务自动化、飞行日志处理、仿真环境搭建、飞行动力学建模和图像处理应用,本专栏全面涵盖了Pixhawk与MATLAB编程的各个关键领域。通过深入浅出的讲解和丰富的案例,本专栏旨在为读者提供全面的指导,帮助他们掌握Pixhawk与MATLAB编程的精髓,并将其应用于无人机控制和相关领域的实际项目中。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【Docker基础入门】:掌握Docker技术,开启云原生之旅

# 摘要
Docker作为一种流行的容器化技术,在软件开发和部署领域中扮演着重要角色。本文从Docker技术的基础知识讲起,逐步深入到安装、配置、镜像制作与管理、容器实践应用以及企业级应用与实践。通过系统性地介绍Docker环境的搭建、命令行操作、网络与存储配置、镜像的构建优化、镜像仓库的维护,以及容器化应用的部署和监控,本文旨在为读者提供全面的Docker使
【HFSS仿真新手速成】:5个步骤带你精通边界与端口设置
# 摘要
本文全面介绍了HFSS仿真软件在电磁仿真领域的应用,特别关注于边界条件和端口设置的基础知识与进阶技巧。首先概述了HFSS仿真和基础设置的重要性,随后深入探讨了边界条件的理论基础、设置步骤、以及对仿真结果的影响。第三章详细解析了端口设置的理论与实践操作,并分析了其对
【Python电子表格自动化速成】:从入门到精通的一步到位指南
# 摘要
随着信息技术的发展,Python在电子表格自动化领域的应用越来越广泛。本文首先概述了Python电子表格自动化的基本概念,随后详细介绍了Python基础、电子表格自动化工具的选择与配置、实战演练以及高级功能拓展。本文通过深入探讨数据处理、分析、可视化和报告生成等关键环节,展示了如何利用Python及其库(如Pandas、Matplotlib/Seaborn)高效地自动化处理电子表格任
【AmapAuto协议效率提升秘籍】:车辆调度新策略全解析
# 摘要
本文综述了AmapAuto协议在车辆调度领域的应用和高效调度策略的实现。首先,概述了车辆调度问题的历史和发展的基础理论,包括不同调度算法的分类和优化目标。然后,详细分析了在AmapAuto协议指导下,如何设计实时高效调度策略的算法框架,并通过实践案例对策略的有效性进行验证。接下来,本文探讨了AmapAuto协议的实战应用,包
【大型项目代码质量守护者】:PowerArtist在大型项目中的应用案例
# 摘要
本论文旨在全面介绍PowerArtist工具,从基础理论到实际应用,再到高级技巧和案例研究。首先概述了PowerArtist工具,并探讨了代码质量的重要性及其度量方法。接着,文章详细阐述了PowerArtist的核心功能,如静态代码分析、代码度量和缺陷检测技术,并介绍其集成和部署策略。第三章通过实践案例分析了工
【CDD数据库性能优化】:揭秘进阶技巧,提升数据库响应速度
# 摘要
本文主要探讨了CDD数据库性能优化的各个方面,从理论基础到实践应用,再到高可用性策略和高级技巧。首先介绍了CDD数据库的架构理解和性能优化的基本概念,重点阐述了性能瓶颈的识别和性能监控的分析工具,以及优化的目标与策略。其次,通过索引优化技术、查询优化以及系统配置调整三方面深入介绍了性能调优实践。此外,还详细讨论了数据库高可用
【精通Matlab】:工业机器人轨迹规划与运动控制的实战指南
# 摘要
本文综述了Matlab在工业机器人领域的应用,包括机器人运动学基础理论、轨迹规划、运动控制以及轨迹优化的高级应用。首先,介绍了机器人运动学
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )