【单片机多机通信全攻略】:从入门到实战,掌握多机互联技术
发布时间: 2024-07-10 13:12:44 阅读量: 270 订阅数: 40 
# 1. 单片机多机通信概述
单片机多机通信是指多个单片机设备之间交换数据和信息的过程。它在嵌入式系统中广泛应用,例如工业自动化、智能家居和物联网设备。
多机通信涉及到多个方面,包括通信协议、通信介质和物理层接口。通信协议定义了数据传输的规则和格式,而通信介质和物理层接口则负责数据的实际传输。
单片机多机通信具有以下优点:
- **提高系统效率:**通过并行处理任务,多机通信可以提高系统的整体效率。
- **增强系统可靠性:**通过冗余通信路径,多机通信可以提高系统的可靠性,防止单点故障。
- **扩大系统规模:**多机通信允许连接更多的设备,从而扩大系统的规模和功能。
# 2. 单片机多机通信基础理论
### 2.1 通信协议与标准
#### 2.1.1 常用通信协议
通信协议是单片机多机通信中的约定和规则,它规定了数据格式、传输速率、错误控制等方面的内容。常用的通信协议包括:
- **串口通信协议(UART):**用于串行数据传输,是一种简单且广泛使用的协议。
- **I2C通信协议:**一种串行总线协议,用于连接多个设备。
- **SPI通信协议:**一种高速串行通信协议,用于连接主设备和从设备。
- **CAN通信协议:**一种用于工业控制和汽车领域的总线协议。
- **USB通信协议:**一种通用串行总线协议,用于连接计算机和外围设备。
#### 2.1.2 通信标准和规范
通信标准和规范是由行业组织或国际标准化机构制定的,它们定义了通信协议的具体实现细节和要求。常见的通信标准包括:
- **RS-232:**串口通信的标准,定义了物理层和数据格式。
- **I2C:**I2C通信的标准,定义了协议格式和电气特性。
- **SPI:**SPI通信的标准,定义了协议格式和时序要求。
- **CAN:**CAN通信的标准,定义了协议格式和网络拓扑结构。
- **USB:**USB通信的标准,定义了物理层、数据格式和协议栈。
### 2.2 通信介质与物理层
#### 2.2.1 通信介质的类型
通信介质是单片机多机通信中传输数据的物理通道,常见的通信介质包括:
- **导线:**用于传输电信号,可以是双绞线、同轴电缆或光纤。
- **无线电波:**用于传输无线信号,可以是蓝牙、Zigbee或Wi-Fi。
- **红外线:**用于传输短距离数据,可以是红外线发射器和接收器。
#### 2.2.2 物理层接口和电路设计
物理层接口是单片机与通信介质之间的连接点,它负责数据的发送和接收。常见的物理层接口包括:
- **RS-232接口:**用于串口通信,采用DB-9或DB-25连接器。
- **I2C接口:**用于I2C通信,采用4针连接器。
- **SPI接口:**用于SPI通信,采用6针连接器。
- **USB接口:**用于USB通信,采用Type-A或Type-B连接器。
物理层电路设计涉及到信号调制、放大和滤波等方面,以确保数据的可靠传输。
**代码块:**
```c
// RS-232发送数据
void uart_send_data(uint8_t data)
{
// 设置发送数据寄存器
UART_TX_DATA = data;
// 等待数据发送完成
while (!(UART_TX_STATUS & UART_TX_COMPLETE));
}
// I2C读取数据
uint8_t i2c_read_data(uint8_t slave_addr, uint8_t reg_addr)
{
// 设置从设备地址和寄存器地址
I2C_SLAVE_ADDR = slave_addr;
I2C_REG_ADDR = reg_addr;
// 发送从设备地址和寄存器地址
I2C_START;
// 等待从设备响应
while (!(I2C_STATUS & I2C_SLAVE_ACK));
// 发送读命令
I2C_WRITE_DATA(0x01);
// 等待从设备响应
while (!(I2C_STATUS & I2C_SLAVE_ACK));
// 重启I2C总线
I2C_RESTART;
// 再次设置从设备地址
I2C_SLAVE_ADDR = slave_addr;
// 等待从设备响应
while (!(I2C_STATUS & I2C_SLAVE_ACK));
// 读数据
uint8_t data = I2C_READ_DATA;
// 发送停止命令
I2C_STOP;
// 返回读取的数据
return data;
}
```
**代码逻辑分析:**
- **uart_send_data()函数:**将数据写入发送数据寄存器并等待数据发送完成。
- **i2c_read_data()函数:**通过I2C总线读取从设备的寄存器数据。它首先设置从设备地址和寄存器地址,然后发送读命令,最后读取数据并返回。
**参数说明:**
- **uart_send_data()函数:**
- data:要发送的数据
- **i2c_read_data()函数:**
- slave_addr:从设备地址
- reg_addr:寄存器地址
**表格:**
| 通信协议 | 特点 | 适用场景 |
|---|---|---|
| UART | 简单、低成本 | 短距离串行通信 |
| I2C | 低功耗、多主从 | 传感器、显示器等设备连接 |
| SPI | 高速、全双工 | 数据采集、图像处理等应用 |
| CAN | 高可靠性、抗干扰 | 工业控制、汽车电子等领域 |
| USB | 通用性强、传输速率高 | 外围设备连接、数据传输 |
**mermaid流程图:**
```mermaid
graph LR
subgraph 串口通信
uart_init() --> uart_send_data()
uart_init() --> uart_receive_data()
end
subgraph I2C通信
i2c_init() --> i2c_start()
i2c_start() --> i2c_write_data()
i2c_write_data() --> i2c_read_data()
i2c_read_data() --> i2c_stop()
end
```
# 3. 单片机多机通信实践应用
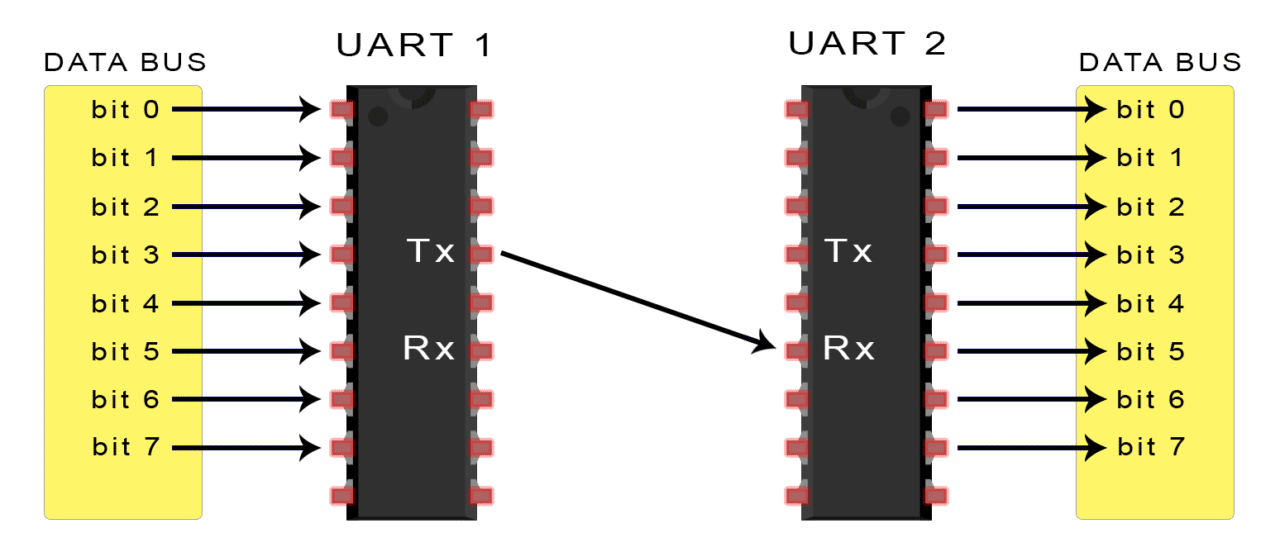
### 3.1 串口通信
#### 3.1.1 串口通信原理
串口通信是一种异步串行通信方式,数据以一位一位的形式传输,传输速率较低,但成本低廉,广泛应用于单片机之间的通信。串口通信的原理如下:
- **数据帧结构:**一个数据帧由起始位、数据位、奇偶校验位和停止位组成。
- **起始位:**一个低电平信号,表示数据帧的开始。
- **数据位:**包含要传输的数据,通常为 8 位。
- **奇偶校验位:**用于检测数据传输中的错误,可以是奇校验或偶校验。
- **停止位:**一个高电平信号,表示数据帧的结束。
#### 3.1.2 串口通信编程实现
在单片机中,串口通信通常通过 USART(通用异步收发器)模块实现。USART 寄存器主要包括:
- **数据寄存器(DR):**用于读写数据。
- **状态寄存器(SR):**指示 USART 的状态,如发送完成、接收完成等。
- **控制寄存器(CR):**配置 USART 的参数,如波特率、数据位长度等。
**发送数据:**
```c
// 发送一个字节
USART_SendData(USARTx, data);
// 等待发送完成
while (USART_GetFlagStatus(USARTx, USART_FLAG_TXE) == RESET);
```
**接收数据:**
```c
// 等待接收完成
while (USART_GetFlagStatus(USARTx, USART_FLAG_RXNE) == RESET);
// 读取接收到的数据
data = USART_ReceiveData(USARTx);
```
**波特率设置:**
```c
// 设置波特率为 9600
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 9600;
USART_Init(USARTx, &USART_InitStructure);
```
### 3.2 I2C通信
#### 3.2.1 I2C通信原理
I2C(Inter-Integrated Circuit)是一种串行总线通信协议,用于连接多个设备。I2C 通信的特点如下:
- **总线拓扑:**采用多主从结构,一个主设备可以连接多个从设备。
- **数据传输:**数据以 8 位为一帧传输,支持双向通信。
- **地址寻址:**每个从设备都有一个唯一的地址,主设备通过地址寻址从设备。
#### 3.2.2 I2C通信编程实现
在单片机中,I2C 通信通常通过 I2C 模块实现。I2C 寄存器主要包括:
- **数据寄存器(DR):**用于读写数据。
- **状态寄存器(SR):**指示 I2C 的状态,如传输完成、仲裁丢失等。
- **控制寄存器(CR):**配置 I2C 的参数,如时钟频率、地址等。
**发送数据:**
```c
// 设置从设备地址
I2C_Send7bitAddress(I2Cx, slave_address, I2C_Direction_Transmitter);
// 等待发送完成
while (I2C_GetFlagStatus(I2Cx, I2C_FLAG_TXE) == RESET);
// 发送数据
I2C_SendData(I2Cx, data);
```
**接收数据:**
```c
// 设置从设备地址
I2C_Send7bitAddress(I2Cx, slave_address, I2C_Direction_Receiver);
// 等待接收完成
while (I2C_GetFlagStatus(I2Cx, I2C_FLAG_RXNE) == RESET);
// 读取接收到的数据
data = I2C_ReceiveData(I2Cx);
```
**地址寻址:**
```c
// 发送从设备地址
I2C_Send7bitAddress(I2Cx, slave_address, I2C_Direction_Transmitter);
// 等待地址发送完成
while (I2C_GetFlagStatus(I2Cx, I2C_FLAG_ADDR) == RESET);
```
### 3.3 SPI通信
#### 3.3.1 SPI通信原理
SPI(Serial Peripheral Interface)是一种高速串行通信协议,主要用于连接微控制器和外围设备。SPI 通信的特点如下:
- **总线拓扑:**采用主从结构,一个主设备可以连接多个从设备。
- **数据传输:**数据以位为单位传输,支持全双工通信。
- **时钟同步:**主设备通过时钟信号同步从设备的数据传输。
#### 3.3.2 SPI通信编程实现
在单片机中,SPI 通信通常通过 SPI 模块实现。SPI 寄存器主要包括:
- **数据寄存器(DR):**用于读写数据。
- **状态寄存器(SR):**指示 SPI 的状态,如传输完成、接收完成等。
- **控制寄存器(CR):**配置 SPI 的参数,如时钟频率、数据位长度等。
**发送数据:**
```c
// 设置从设备地址
SPI_SendData(SPIx, data);
// 等待发送完成
while (SPI_GetFlagStatus(SPIx, SPI_FLAG_TXE) == RESET);
```
**接收数据:**
```c
// 等待接收完成
while (SPI_GetFlagStatus(SPIx, SPI_FLAG_RXNE) == RESET);
// 读取接收到的数据
data = SPI_ReceiveData(SPIx);
```
**时钟配置:**
```c
// 设置时钟频率为 1MHz
SPI_InitTypeDef SPI_InitStructure;
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_16;
SPI_Init(SPIx, &SPI_InitStructure);
```
# 4. 单片机多机通信高级应用
### 4.1 无线通信
#### 4.1.1 无线通信技术简介
无线通信是指在没有物理介质连接的情况下,通过无线电波或其他电磁波进行数据传输的技术。它广泛应用于各种领域,如移动通信、物联网、工业自动化等。
无线通信技术主要分为以下几类:
- **蓝牙 (Bluetooth)**:一种短距离无线通信技术,用于连接移动设备、耳机和扬声器等设备。
- **Wi-Fi (Wi-Fi)**:一种基于 IEEE 802.11 标准的无线局域网技术,提供高速数据传输和互联网接入。
- **ZigBee**:一种低功耗、低速率的无线通信技术,主要用于物联网和工业自动化应用。
- **LoRa**:一种长距离、低功耗的无线通信技术,适用于远距离数据传输和物联网应用。
- **蜂窝通信**:一种基于蜂窝网络的无线通信技术,提供移动设备的语音和数据服务。
#### 4.1.2 无线通信模块选型和使用
在单片机多机通信系统中,无线通信模块的选择至关重要。需要考虑以下因素:
- **通信距离**:根据应用场景,确定所需的通信距离。
- **数据速率**:根据数据传输需求,选择合适的数据速率。
- **功耗**:对于电池供电的设备,功耗是一个重要考虑因素。
- **成本**:无线通信模块的成本应符合项目预算。
以下是无线通信模块选型的步骤:
1. **确定通信需求**:明确通信距离、数据速率、功耗和成本等要求。
2. **研究无线通信技术**:了解不同无线通信技术的特点和优势。
3. **选择无线通信模块**:根据需求选择合适的无线通信模块,并考虑其性能、功耗和成本。
4. **集成到单片机系统**:将无线通信模块集成到单片机系统中,并进行必要的硬件和软件配置。
### 4.2 网络通信
#### 4.2.1 网络通信基础知识
网络通信是指通过计算机网络进行数据传输和交换的技术。它使单片机能够与其他设备、服务器和互联网进行通信。
网络通信涉及以下关键概念:
- **IP 地址**:每个连接到网络的设备都有一个唯一的 IP 地址,用于标识设备并路由数据。
- **TCP/IP 协议栈**:一种用于网络通信的协议套件,包括 TCP、IP、UDP 等协议。
- **路由**:将数据从源设备传输到目标设备的过程。
- **网络拓扑**:网络中设备连接方式的物理或逻辑结构。
#### 4.2.2 单片机网络通信编程实现
单片机网络通信的编程实现通常涉及以下步骤:
1. **初始化网络接口**:配置单片机的网络接口,包括 IP 地址、子网掩码和网关地址。
2. **创建套接字**:创建用于网络通信的套接字,指定通信协议(TCP 或 UDP)。
3. **连接到远程主机**:使用套接字连接到远程主机,指定主机 IP 地址和端口号。
4. **发送和接收数据**:通过套接字发送和接收数据,使用 send() 和 recv() 函数。
5. **关闭连接**:完成通信后,关闭套接字并释放资源。
以下是单片机网络通信编程实现的代码示例(使用 lwIP 库):
```c
#include "lwip/sockets.h"
int main() {
// 初始化网络接口
netif_init();
// 创建套接字
int sock = socket(AF_INET, SOCK_STREAM, 0);
// 连接到远程主机
struct sockaddr_in addr;
addr.sin_family = AF_INET;
addr.sin_addr.s_addr = inet_addr("192.168.1.100");
addr.sin_port = htons(80);
connect(sock, (struct sockaddr *)&addr, sizeof(addr));
// 发送数据
const char *data = "Hello, world!";
send(sock, data, strlen(data), 0);
// 接收数据
char buffer[1024];
recv(sock, buffer, sizeof(buffer), 0);
// 关闭连接
close(sock);
return 0;
}
```
**代码逻辑分析:**
- 初始化网络接口,配置 IP 地址等信息。
- 创建一个 TCP 套接字。
- 使用 `connect()` 函数连接到远程主机,指定 IP 地址和端口号。
- 使用 `send()` 函数发送数据到远程主机。
- 使用 `recv()` 函数接收远程主机发送的数据。
- 关闭套接字,释放资源。
# 5. 单片机多机通信系统设计与实现
### 5.1 通信系统架构设计
#### 5.1.1 通信拓扑结构
通信拓扑结构是指单片机多机通信系统中各节点之间的连接方式。常见的拓扑结构包括:
- **总线拓扑结构:**所有节点连接到一条公共总线上,数据通过总线传输。优点是简单、成本低,缺点是可靠性差,容易受噪声干扰。
- **星形拓扑结构:**所有节点连接到一个中央节点,数据通过中央节点转发。优点是可靠性高、易于管理,缺点是成本高、中央节点故障会导致整个系统瘫痪。
- **环形拓扑结构:**所有节点连接成一个环形,数据沿环形传输。优点是可靠性高、无单点故障,缺点是布线复杂、扩展性差。
- **网状拓扑结构:**各节点之间相互连接,形成一个网状结构。优点是可靠性高、扩展性好,缺点是布线复杂、成本高。
选择合适的拓扑结构需要考虑系统规模、可靠性、成本等因素。
#### 5.1.2 通信协议栈设计
通信协议栈是指单片机多机通信系统中各层通信协议的集合。常见的协议栈包括:
- **OSI七层模型:**物理层、数据链路层、网络层、传输层、会话层、表示层、应用层。
- **TCP/IP协议栈:**网络接口层、互联网层、传输层、应用层。
选择合适的协议栈需要考虑系统需求、性能、安全等因素。
### 5.2 通信系统软件开发
#### 5.2.1 通信驱动程序设计
通信驱动程序是单片机与通信外设之间的接口,负责数据的收发和控制。设计通信驱动程序时需要考虑以下因素:
- **硬件接口:**与通信外设的硬件接口,如串口、I2C、SPI等。
- **数据格式:**数据传输的格式,如字节流、帧等。
- **数据流控制:**控制数据流的机制,如流量控制、错误检测等。
#### 5.2.2 通信协议实现
通信协议实现是指在单片机上实现通信协议的软件。设计通信协议实现时需要考虑以下因素:
- **协议规范:**通信协议的规范,如帧格式、校验算法等。
- **数据处理:**对接收到的数据的处理,如解析、校验、重组等。
- **错误处理:**对通信过程中发生的错误的处理,如重传、超时等。
通过通信系统架构设计和软件开发,可以实现单片机多机通信系统的稳定可靠运行。
# 6. 单片机多机通信实战案例
### 6.1 智能家居控制系统
#### 6.1.1 系统需求分析
智能家居控制系统主要用于实现对家居环境的智能化控制,包括灯光控制、家电控制、环境监测等功能。系统需求分析如下:
* **功能需求:**
* 灯光控制:实现对灯光亮度、颜色、模式的控制。
* 家电控制:实现对空调、电视、冰箱等家电的控制。
* 环境监测:监测室内温度、湿度、光照等环境参数。
* **性能需求:**
* 实时性:系统响应时间应小于1秒。
* 可靠性:系统应具备较高的可靠性,确保稳定运行。
* 可扩展性:系统应易于扩展,满足未来功能需求的增长。
#### 6.1.2 系统设计与实现
智能家居控制系统采用单片机作为主控器,通过无线通信模块与其他设备进行通信。系统架构如下:
```mermaid
graph LR
subgraph 单片机主控器
A[单片机]
end
subgraph 无线通信模块
B[Zigbee]
C[Wi-Fi]
end
subgraph 传感器和执行器
D[温度传感器]
E[湿度传感器]
F[灯光控制器]
G[空调控制器]
end
A --> B
A --> C
B --> D
B --> E
C --> F
C --> G
```
系统实现主要包括以下步骤:
1. **单片机主控器编程:**编写单片机程序,实现通信协议、数据解析、控制逻辑等功能。
2. **无线通信模块配置:**配置无线通信模块,建立通信网络。
3. **传感器和执行器集成:**将传感器和执行器连接到无线通信模块,实现数据采集和控制。
4. **系统测试和调试:**对系统进行全面测试和调试,确保系统稳定可靠。
### 6.2 工业自动化控制系统
#### 6.2.1 系统需求分析
工业自动化控制系统主要用于实现对工业设备的自动化控制,包括设备监控、数据采集、控制策略执行等功能。系统需求分析如下:
* **功能需求:**
* 设备监控:实时监控设备状态,包括温度、压力、流量等参数。
* 数据采集:采集设备运行数据,用于分析和优化。
* 控制策略执行:根据控制策略,对设备进行控制,实现自动化生产。
* **性能需求:**
* 实时性:系统响应时间应小于500毫秒。
* 可靠性:系统应具备极高的可靠性,确保生产安全稳定。
* 鲁棒性:系统应能够承受恶劣的环境条件,如高温、高湿、振动等。
#### 6.2.2 系统设计与实现
工业自动化控制系统采用单片机作为主控器,通过工业总线与其他设备进行通信。系统架构如下:
```mermaid
graph LR
subgraph 单片机主控器
A[单片机]
end
subgraph 工业总线
B[Modbus]
C[Profibus]
end
subgraph 传感器和执行器
D[温度传感器]
E[压力传感器]
F[流量传感器]
G[电机控制器]
H[阀门控制器]
end
A --> B
A --> C
B --> D
B --> E
B --> F
C --> G
C --> H
```
系统实现主要包括以下步骤:
1. **单片机主控器编程:**编写单片机程序,实现通信协议、数据解析、控制策略等功能。
2. **工业总线配置:**配置工业总线,建立通信网络。
3. **传感器和执行器集成:**将传感器和执行器连接到工业总线,实现数据采集和控制。
4. **系统测试和调试:**对系统进行全面测试和调试,确保系统稳定可靠。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《单片机多机通信程序设计》专栏为您提供全面的单片机多机通信技术指南。从入门基础到实战应用,从通信协议解析到系统设计,从故障排除到性能优化,从安全保障到编程技巧,从协议比较到硬件设计,从软件开发到系统仿真,从网络拓扑到数据格式,从时序分析到中断处理,从缓冲管理到同步机制,从错误检测到协议栈设计,本专栏涵盖了单片机多机通信的方方面面。通过深入浅出的讲解和丰富的实战案例,帮助您掌握多机互联技术,打造高效可靠的通信系统,提升嵌入式系统性能。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
构建可扩展的微服务架构:系统架构设计从零开始的必备技巧
# 摘要
微服务架构作为一种现代化的分布式系统设计方法,已成为构建大规模软件应用的主流选择。本文首先概述了微服务架构的基本概念及其设计原则,随后探讨了微服务的典型设计模式和部署策略,包括服务发现、通信模式、熔断容错机制、容器化技术、CI/CD流程以及蓝绿部署等。在技术栈选择与实践方面,重点讨论了不同编程语言和框架下的微服务实现,以及关系型和NoSQL数据库在微服务环境中的应用。此外,本文还着重于微服务监控、日志记录和故障处理的最佳实践,并对微服
NYASM最新功能大揭秘:彻底释放你的开发潜力
# 摘要
NYASM是一个功能强大的汇编语言工具,支持多种高级编程特性并具备良好的模块化编程支持。本文首先对NYASM的安装配置进行了概述,并介绍了其基础与进阶语法。接着,本文探讨了NYASM在系统编程、嵌入式开发以及安全领域的多种应用场景。文章还分享了NYASM的高级编程技巧、性能调优方法以及最佳实践,并对调试和测试进行了深入讨论。最后,本文展望了NYASM的未来发展方向,强调了其与现代技
【ACC自适应巡航软件功能规范】:揭秘设计理念与实现路径,引领行业新标准

# 摘要
自适应巡航控制(ACC)系统作为先进的驾驶辅助系统之一,其设计理念在于提高行车安全性和驾驶舒适性。本文从ACC系统的概述出发,详细探讨了其设计理念与框架,包括系统的设计目标、原则、创新要点及系统架构。关键技术如传感器融合和算法优化也被着重解析。通过介绍ACC软件的功能模块开发、测试验证和人机交互设计,本文详述了系统的实现
ICCAP调优初探:提效IC分析的六大技巧

# 摘要
ICCAP(Image Correlation for Camera Pose)是一种用于估计相机位姿和场景结构的先进算法,广泛应用于计算机视觉领域。本文首先概述了ICCAP的基础知识和分析挑战,深入探讨了ICCAP调优理论,包括其分析框架的工作原理、主要组件、性能瓶颈分析,以及有效的调优策略。随后,本文介绍了ICCAP调优实践中的代码优化、系统资源管理优化和数据处理与存储优化
LinkHome APP与iMaster NCE-FAN V100R022C10协同工作原理:深度解析与实践

# 摘要
本文首先介绍了LinkHome APP与iMaster NCE-FAN V100R022C10的基本概念及其核心功能和原理,强调了协同工作在云边协同架构中的作用,包括网络自动化与设备发现机制。接下来,本文通过实践案例探讨了LinkHome APP与iMaster NCE-FAN V100R022C1
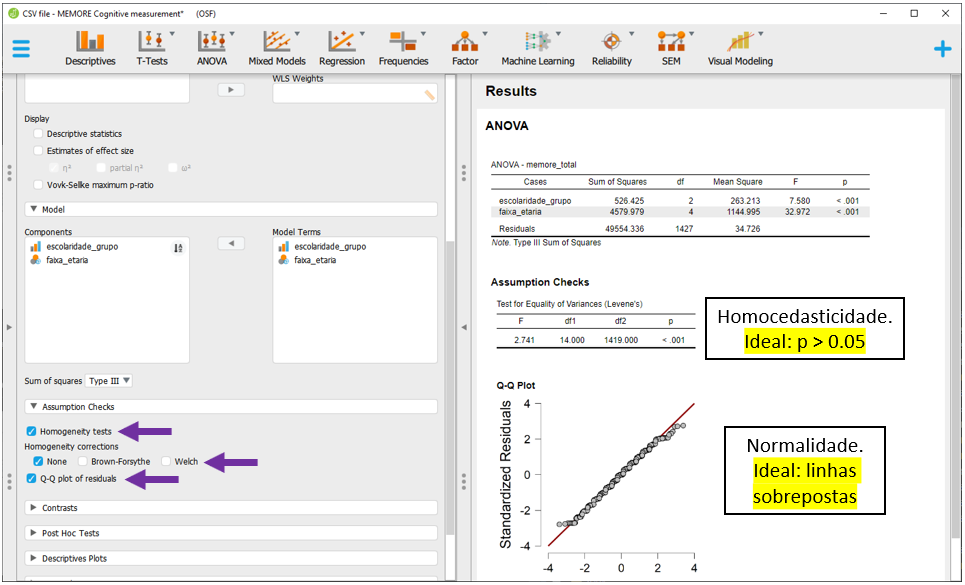
紧急掌握:单因子方差分析在Minitab中的高级应用及案例分析
# 摘要
本文详细介绍了单因子方差分析的理论基础、在Minitab软件中的操作流程以及实际案例应用。首先概述了单因子方差分析的概念和原理,并探讨了F检验及其统计假设。随后,文章转向Minitab界面的基础操作,包括数据导入、管理和描述性统计分析。第三章深入解释了方差分析表的解读,包括平方和的计算和平均值差异的多重比较。第四章和第五章分别讲述了如何在Minitab中执行单因子方
全球定位系统(GPS)精确原理与应用:专家级指南
# 摘要
本文对全球定位系统(GPS)的历史、技术原理、应用领域以及挑战和发展方向进行了全面综述。从GPS的历史和技术概述开始,详细探讨了其工作原理,包括卫星信号构成、定位的数学模型、信号增强技术等。文章进一步分析了GPS在航海导航、航空运输、军事应用以及民用技术等不同领域的具体应用,并讨论了当前面临的信号干扰、安全问题及新技术融合的挑战。最后,文
AutoCAD VBA交互设计秘籍:5个技巧打造极致用户体验
# 摘要
本论文系统介绍了AutoCAD VBA交互设计的入门知识、界面定制技巧、自动化操作以及高级实践案例,旨在帮助设计者和开发者提升工作效率与交互体验。文章从基本的VBA用户界面设置出发,深入探讨了表单和控件的应用,强调了优化用户交互体验的重要性。随后,文章转向自动化操作,阐述了对象模型的理解和自动化脚本的编写。第三部分展示了如何应用ActiveX Automation进行高级交互设计,以及如何定制更复杂的用户界面元素,以及解决方案设计过程中的用户反馈收集和应用。最后一章重点介绍了VBA在AutoCAD中的性能优化、调试方法和交互设计的维护更新策略。通过这些内容,论文提供了全面的指南,以应
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )