【C++游戏开发秘籍】:掌握物理引擎构建的10大关键技巧
发布时间: 2024-12-09 23:53:11 阅读量: 12 订阅数: 12 

Visual C++ 游戏开发案例实战【高清】带书签.rar
# 1. C++游戏开发和物理引擎基础
游戏开发是一个涉及众多技术细节的复杂过程,而物理引擎是其中的关键组件之一。对于使用C++语言开发游戏的开发者来说,理解并熟练应用物理引擎对于创造真实和吸引人的游戏体验至关重要。物理引擎通过模拟现实世界的物理规律,负责处理游戏中的各种动力学交互,如碰撞、重力和摩擦力等,以实现复杂的游戏逻辑和逼真的视觉效果。
## 1.1 C++在游戏开发中的地位
C++是一种广泛应用于游戏开发的语言,因为其性能优越,能够高效地利用硬件资源。许多知名的游戏引擎,比如Unreal Engine,都支持C++,使得开发者能深入定制和优化游戏。此外,C++的面向对象特性、灵活性以及丰富的库支持,使其成为实现复杂游戏逻辑和物理模拟的首选。
## 1.2 物理引擎在游戏中的作用
物理引擎为游戏世界添加了“物理正确性”,即在游戏世界中模拟出与现实世界类似的物理行为。这不仅包括最基本的碰撞检测和响应,还包括复杂的动力学运算,如刚体动力学、流体动力学等。通过物理引擎,游戏可以实现物理破坏效果、自然运动规律、真实的交互反馈等,大大增强了玩家的游戏体验。
下面的章节我们将深入探讨物理引擎的核心概念和高级应用技巧,以及如何在C++中使用这些先进的工具和技术。
# 2. 物理引擎核心概念的理论与实践
物理引擎是游戏开发中模拟现实世界物理特性的关键组件,它不仅帮助开发者创建更加真实和动态的环境,还增强了玩家的沉浸式体验。本章节将深入探讨物理引擎的核心概念,包括坐标系统、碰撞检测与响应以及刚体动力学,并结合实践案例介绍这些概念如何在游戏开发中得到应用。
## 2.1 物理引擎中的坐标系统
### 2.1.1 世界坐标与局部坐标
在物理引擎中,坐标系统是理解对象位置和运动的基础。世界坐标系(World Coordinate System)是固定不变的,为场景中所有物体提供一个共同的参照系统。它是物理模拟中最重要的坐标系,因为所有物理计算都是基于世界坐标系完成的。
相对地,局部坐标系(Local Coordinate System)定义了单个物体的参照点和方向,它允许独立于世界坐标来移动和旋转对象。每个物体都有自己的局部坐标系,当物体发生运动时,它相对于局部坐标系的位置和方向会改变,而相对于世界坐标系的位置和方向则由局部坐标到世界坐标的转换矩阵来确定。
```cpp
// C++代码示例:使用矩阵变换物体位置
// 假设有一个4x4的变换矩阵,表示物体在世界坐标系中的位置和方向
Eigen::Matrix4f transformMatrix;
// 使用矩阵乘法计算局部坐标点在世界坐标系中的位置
Eigen::Vector4f localPoint(1.0f, 2.0f, 3.0f, 1.0f); // 局部坐标点
Eigen::Vector4f worldPoint = transformMatrix * localPoint; // 计算后为世界坐标点
// 参数说明:
// Eigen 是一个常用的线性代数库,Matrix4f 是一个4x4的浮点矩阵类型
// Vector4f 是一个具有四个浮点数分量的向量类型,表示一个点或向量
// transformMatrix 表示物体的变换(包括位置、旋转和缩放)
// localPoint 是一个局部坐标点,worldPoint 是变换到世界坐标后的点
```
### 2.1.2 向量和矩阵基础
在物理引擎中,向量和矩阵是描述物体位置、方向、速度和加速度等属性的重要数学工具。向量提供了一个方向和一个大小,用于表示力、速度、加速度等矢量量;矩阵则用于表示线性变换,如旋转、缩放和位移。
一个重要的概念是向量归一化,即将向量缩放到单位长度。归一化的向量常用于计算方向而不关心大小。矩阵则通常用作变换,将点或向量从一个坐标系变换到另一个坐标系。
```cpp
// C++代码示例:向量的基本操作
// 定义两个向量
Eigen::Vector3f vectorA(1.0f, 2.0f, 3.0f);
Eigen::Vector3f vectorB(4.0f, 5.0f, 6.0f);
// 向量加法
Eigen::Vector3f vectorSum = vectorA + vectorB;
// 向量点积(标量积)
float dotProduct = vectorA.dot(vectorB);
// 向量叉积(向量积)
Eigen::Vector3f crossProduct = vectorA.cross(vectorB);
// 向量归一化
Eigen::Vector3f normalizedVector = vectorA.normalized();
// 参数说明:
// Vector3f 是一个三维浮点向量类型,包含三个分量
// vectorSum 是向量A和向量B的和,dotProduct 是两个向量的点积
// crossProduct 是两个向量的叉积,normalizedVector 是向量A归一化后的结果
```
## 2.2 碰撞检测与响应
### 2.2.1 碰撞检测算法
碰撞检测是物理引擎中的核心任务,它检测两个或多个对象是否接触或相交。碰撞检测算法的效率直接关系到整个物理模拟的性能,因此它通常需要优化算法以减少计算时间。
简单的碰撞检测可以使用边界盒(Bounding Box)进行快速的粗略检测,复杂碰撞检测则可能需要使用边界体积层次结构(Bounding Volume Hierarchy, BVH)或凸包(Convex Hull)等高级几何结构。
```mermaid
graph TD;
A[开始碰撞检测] --> B[使用边界盒检测]
B --> |检测到可能碰撞| C[使用边界体积层次结构(BVH)]
B --> |未检测到碰撞| D[无碰撞]
C --> |确定碰撞| E[计算精确碰撞]
C --> |未确定碰撞| D
E --> F[碰撞响应处理]
```
### 2.2.2 碰撞响应机制
碰撞响应是物理引擎在检测到碰撞后采取的行动。碰撞响应算法考虑了碰撞对象的物理属性,例如质量、弹性系数和摩擦系数,以计算出碰撞后对象的速度和方向。
在碰撞响应中,关键的一步是计算冲量(Impulse),它是在碰撞瞬间施加于对象的力。冲量通常根据动量守恒定律来计算,确保物理模拟的正确性和真实感。
```cpp
// C++代码示例:计算碰撞冲量
// 假设两个刚体A和B发生了碰撞,质量分别为mA和mB
float mA = 1.0f; // 刚体A的质量
float mB = 2.0f; // 刚体B的质量
// 刚体A和B在碰撞前的速度
Eigen::Vector3f velocityA_before(1.0f, 0.0f, 0.0f);
Eigen::Vector3f velocityB_before(-1.0f, 0.0f, 0.0f);
// 碰撞前的相对速度
Eigen::Vector3f relativeVelocity = velocityA_before - velocityB_before;
// 假设碰撞后的相对速度为零(完全弹性碰撞)
Eigen::Vector3f relativeVelocity_after = Eigen::Vector3f::Zero();
// 计算碰撞冲量
Eigen::Vector3f impulse = ((-1.0f * relativeVelocity + relativeVelocity_after) / (1.0f / mA + 1.0f / mB));
// 参数说明:
// mA和mB 分别是刚体A和B的质量
// velocityA_before 和 velocityB_before 是碰撞前刚体A和B的速度
// relativeVelocity 是碰撞前两刚体的相对速度
// relativeVelocity_after 是碰撞后理想状态下的相对速度
// impulse 是计算出的碰撞冲量
```
## 2.3 刚体动力学
### 2.3.1 质量、惯性和力的概念
刚体动力学是研究刚体在力的作用下运动规律的科学。在刚体动力学中,质量决定了物体抵抗速度变化的能力,惯性则是物体保持其静止或匀速直线运动状态的倾向。力是引起物体运动状态改变的根源。
牛顿的三大运动定律是刚体动力学的基础。第一定律(惯性定律)表明,如果没有外力作用,刚体会保持静止或匀速直线运动。第二定律(加速度定律)表明,物体的加速度与作用力成正比,与质量成反比。第三定律(作用与反作用定律)表明,对于任何作用力,总有一个大小相等、方向相反的反作用力。
### 2.3.2 运动方程求解方法
刚体的运动状态可以用牛顿第二定律的微分方程来描述。为了求解这些方程,通常采用数值方法,如欧拉方法、龙格-库塔方法等。数值求解允许计算机以离散的时间步长来近似连续的物理过程。
欧拉方法是最简单的数值积分方法之一,它使用当前时刻的导数值来预测下一个时刻的状态。虽然欧拉方法易于实现,但其精度较低,容易出现数值稳定问题。为了提高精确度和稳定性,更复杂的方法如四阶龙格-库塔方法经常被采用。
```cpp
// C++代码示例:使用欧拉方法进行简单的数值积分
// 定义一个简单的物理系统:质量为m的物体受到一个恒定的力F
float m = 1.0f; // 物体的质量
float F = 10.0f; // 恒定的力
float timeStep = 0.1f; // 时间步长
// 初始状态:位置0,速度0
float position = 0.0f;
float velocity = 0.0f;
// 模拟10个时间步长
for (int i = 0; i < 10; ++i) {
// 使用牛顿第二定律计算加速度a = F/m
float acceleration = F / m;
// 使用欧拉方法更新位置和速度
position += velocity * timeStep;
velocity += acceleration * timeStep;
// 输出当前状态
std::cout << "Step " << i << ": Position = " << position << ", Velocity = " << velocity << std::endl;
}
// 参数说明:
// m 是物体的质量,F 是作用力
// timeStep 是每个时间步长的长度
// position 和 velocity 分别是物体的位置和速度
```
这些章节内容展示了物理引擎核心概念的理论基础及其实践应用,为游戏开发人员提供了扎实的知识基础,帮助他们创建更真实、更有趣的游戏体验。
# 3. 物理引擎的高级应用技巧
物理引擎的高级应用技巧对于游戏和模拟系统的开发者来说至关重要。这些技巧能够带来更为逼真的体验,并且能够提升游戏和模拟系统的整体性能。本章将深入探讨角动量和旋转动力学、软体和布料模拟以及流体和气体动力学的应用。
## 角动量和旋转动力学
角动量是描述物体旋转状态的物理量,它在计算机游戏中用于模拟旋转物体的动力学行为。了解角动量守恒定律对于创建物理准确的旋转效果至关重要。
### 角动量守恒定律
角动量守恒定律指出,一个系统的总角动量在没有外力矩作用下是守恒的。这个概念在游戏开发中特别有用,因为在没有外力作用的情况下,游戏对象的旋转状态应该保持不变。例如,一个旋转的陀螺或者一个在空中翻转的飞盘,都可以用角动量守恒定律来模拟。
```cpp
// 假设一个简单的物理对象,拥有一个角动量类来管理旋转状态
class PhysicalObject {
public:
Vector3 angularMomentum;
Vector3 torque;
void updateAngularState(float deltaTime) {
// 假设没有外力矩作用,角动量守恒
angularMomentum += torque * deltaTime;
// 根据角动量更新对象的旋转
updateRotation(angularMomentum, deltaTime);
}
private:
void updateRotation(const Vector3& angularMomentum, float deltaTime) {
// 旋转更新逻辑...
}
};
// 游戏循环中调用更新方法
PhysicalObject myObject;
while (gameIsRunning) {
myObject.updateAngularState(deltaTime);
}
```
在上述代码中,`PhysicalObject` 类负责维护其旋转状态。`updateAngularState` 方法模拟了角动量守恒定律的应用,其中 `torque` 变量代表作用在物体上的力矩,如果在一个固定的时间间隔内没有外力矩作用,则物体的角动量保持不变。
### 旋转碰撞检测与响应
旋转碰撞检测与响应机制对于实现真实感的物理碰撞非常关键。在现实世界中,旋转的物体具有额外的动态特性,这影响着物体间的碰撞响应。一个旋转的物体可能会对碰撞产生不同的反应,例如产生滑移或滚动。
```cpp
// 假设的碰撞响应函数
void handleCollision(PhysicalObject& obj1, PhysicalObject& obj2) {
// 计算碰撞后的角动量变化
Vector3 impulse = calculateImpulse(obj1, obj2);
obj1.angularMomentum += impulse;
obj2.angularMomentum -= impulse;
// 更新对象的旋转状态
obj1.updateAngularState(deltaTime);
obj2.updateAngularState(deltaTime);
}
// 碰撞后的角动量变化计算示例
Vector3 calculateImpulse(const PhysicalObject& obj1, const PhysicalObject& obj2) {
// 这里简化了计算过程,仅示意
Vector3 collisionNormal = (obj1.position - obj2.position).normalize();
Vector3 relativeVelocity = obj1.velocity - obj2.velocity;
float velocityAlongNormal = relativeVelocity.dot(collisionNormal);
float massSum = obj1.mass + obj2.mass;
float impulseNumerator = -(1.0 + restitution) * velocityAlongNormal;
float impulseDenominator = 1.0 / obj1.mass + 1.0 / obj2.mass;
float impulseMagnitude = impulseNumerator / impulseDenominator;
return collisionNormal * impulseMagnitude;
}
```
在上述代码段中,`calculateImpulse` 函数计算了碰撞后物体的角动量变化。然后,这个变化用来更新两个物体的旋转状态。这种方法可以模拟现实世界中物体的旋转碰撞响应。
## 软体和布料模拟
软体和布料模拟在游戏和虚拟现实世界中十分重要,因为它们为角色和环境增添了更多真实感。软体物体通常指的是弹性物体,比如橡胶球或者枕头,而布料则有其特有的模拟需求,例如衣物或者旗帜。
### 软体物体的物理特性
软体物体的模拟特别依赖于弹性理论,包括杨氏模量、泊松比、剪切模量等参数来定义材料的硬度和柔韧性。物体的形状变化可以用有限元分析(FEA)来模拟。
```cpp
// 软体物体的物理特性描述
class SoftBody {
public:
Vector3[] nodes;
float youngModulus;
float poissonRatio;
float shearModulus;
void simulate(float deltaTime) {
// 根据物理特性更新节点位置
updateNodes(deltaTime);
}
private:
void updateNodes(float deltaTime) {
// 使用有限元分析来更新节点的位置...
}
};
```
### 布料物理模拟技术
布料物理模拟技术通常涉及到复杂的数学运算。布料可以被视为一种二维网格,在模拟时通常需要使用离散网格变形技术。这些技术可以处理布料的拉伸、弯曲、剪切变形。
```cpp
// 布料网格的模拟类
class Cloth {
public:
Vector3[][] mesh;
float stiffness;
float damping;
void simulate(float deltaTime) {
// 更新布料网格的位置
updateMesh(deltaTime);
}
private:
void updateMesh(float deltaTime) {
// 根据物理特性,处理网格节点的拉伸、弯曲和剪切...
}
};
```
## 流体和气体动力学
流体和气体动力学是模拟液体和空气流动的复杂科学,其在游戏和模拟中可用于创建水、火、烟等自然现象。了解粒子系统基础对于模拟这些现象至关重要。
### 粒子系统基础
粒子系统是模拟流体和气体动力学的一种常用方法。粒子系统由大量小的粒子组成,通过模拟每个粒子的运动和交互作用,形成宏观上的流体和气体行为。
```cpp
// 粒子类
class Particle {
public:
Vector3 position;
Vector3 velocity;
Vector3 acceleration;
void update(float deltaTime) {
// 更新粒子的状态,包括位置和速度
velocity += acceleration * deltaTime;
position += velocity * deltaTime;
}
};
// 粒子系统类
class ParticleSystem {
public:
Particle[] particles;
void simulate(float deltaTime) {
// 更新整个粒子系统的状态
for (Particle& particle : particles) {
particle.update(deltaTime);
}
}
};
```
### 流体动力学方程的数值解
流体动力学的基本方程包括纳维-斯托克斯方程,它描述了流体粒子的运动。在计算流体动力学(CFD)中,这些方程通常通过数值方法近似求解,如有限体积法或光滑粒子流体动力学(SPH)。
```cpp
// 纳维-斯托克斯方程的简化数值解模拟
void solveNavierStokesEquation(Particle& fluidParticle, float deltaTime) {
// 纳维-斯托克斯方程的数值解逻辑...
// 例如,使用欧拉方法更新粒子的速度和位置
fluidParticle.velocity += fluidParticle.acceleration * deltaTime;
fluidParticle.position += fluidParticle.velocity * deltaTime;
}
// 以上代码仅为示意,真实的流体动力学模拟会更加复杂
```
在上述代码中,我们展示了如何使用数值方法来近似求解纳维-斯托克斯方程。这些方法可以用来模拟流体的流动,为游戏和模拟系统中的液体效果提供支持。
第三章通过对角动量和旋转动力学、软体和布料模拟以及流体和气体动力学这些高级应用技巧的探讨,向读者展示了物理引擎在创建复杂动态效果时的强大能力。通过代码示例和逻辑分析,我们学习了如何在C++中实现这些高级技术,并为下一章节的物理引擎在游戏中的实践应用打下了坚实的基础。
# 4. 物理引擎在游戏中的实践应用
### 4.1 物理引擎与游戏物理的整合
整合物理引擎与游戏物理是游戏开发中非常关键的步骤。游戏物理不仅仅是在游戏世界中模拟现实世界的物理规律,还包括了对这些规律的艺术调整,以适应游戏的设计和玩法需求。以下是几个在整合物理引擎和游戏物理时需要考虑的要点。
#### 4.1.1 游戏物理的设计原则
游戏设计师在设计游戏时,需要考虑到物理引擎所支持的特性,并根据游戏的目标和玩法来设计游戏物理系统。一个设计良好的游戏物理系统应该做到:
- **真实性与游戏性的平衡**:虽然物理引擎可以模拟真实世界的物理规律,但在游戏中,物理规律往往需要被调整,以满足游戏的玩法需求。例如,游戏中物体的摩擦系数可能会被人为地减小,以增加滑行的效果。
- **灵活性和可调整性**:物理引擎需要允许设计师调整参数,比如重力大小、碰撞弹性等,以便快速迭代游戏玩法。
- **性能考量**:物理模拟很消耗计算资源,因此在设计游戏物理时,需要考虑性能开销,避免对游戏性能产生负面影响。
#### 4.1.2 物理引擎与游戏引擎的交互
物理引擎在现代游戏开发中通常是独立于游戏引擎存在的,游戏引擎提供了与物理引擎交互的接口。通常的游戏引擎都会内置或者提供插件形式的物理引擎模块。这种分离设计的好处是:
- **模块化**:物理引擎可以作为独立模块进行更新和优化,而不需要改动游戏引擎的其他部分。
- **选择性**:游戏开发者可以根据项目需要选择适合的物理引擎,甚至可以同时使用多个物理引擎,以实现特定效果。
- **兼容性**:物理引擎接口的标准化允许不同的物理引擎能够在同一游戏引擎上工作,这提高了开发的灵活性。
### 4.2 物理引擎优化技术
物理引擎虽然提供了强大的模拟能力,但随之而来的往往是巨大的性能开销。因此,学习如何优化物理引擎是游戏开发者必须面对的挑战。
#### 4.2.1 性能分析与瓶颈定位
在优化物理引擎之前,首先要进行性能分析,找出性能瓶颈。这通常包括以下步骤:
- **监控物理计算**:在游戏运行时,实时监控物理引擎的计算量,了解哪些物理操作是性能瓶颈。
- **分析物理对象**:评估物理世界中的对象数量,识别出不需要复杂物理计算的对象,并进行简化。
- **代码剖析**:使用性能分析工具对物理引擎的代码进行剖析,找出热点代码(hotspots)。
#### 4.2.2 优化技巧与最佳实践
物理引擎优化是一个持续的过程,以下是一些常见的优化技巧和最佳实践:
- **使用空间分割技术**:例如四叉树(Quadtree)和八叉树(Octree),可以减少不必要的碰撞检测计算。
- **限制物理更新频率**:不是所有的物理模拟都需要在每一帧更新,可以适当降低更新频率以提高性能。
- **批量处理**:尽可能将物理模拟操作批处理,减少CPU和GPU之间的数据传输。
### 4.3 物理引擎在不同游戏类型中的应用案例
物理引擎的应用根据游戏类型的不同而有所差异,以下是两种类型游戏中物理引擎应用的案例分析。
#### 4.3.1 动作冒险游戏
在动作冒险游戏中,物理引擎常常用来实现:
- **动态环境交互**:例如破坏场景中的物体,或者与环境产生互动,如推倒箱子、跳跃反弹等。
- **角色动作模拟**:角色的动作需要物理引擎来控制,确保动作的流畅性和真实性,比如跳跃、跑动、翻滚等。
#### 4.3.2 模拟类游戏
模拟类游戏要求高度的现实感,物理引擎在这些游戏中起到关键作用:
- **复杂物理环境模拟**:模拟器游戏中可能需要模拟复杂的物理环境,如赛车游戏中的动力学模拟。
- **精细操作控制**:一些模拟类游戏要求玩家精确控制操作,物理引擎提供了底层的支撑,如模拟飞行器的气动力学。
在本章节中,我们探讨了物理引擎在游戏开发中的实际应用,包括游戏物理的设计原则、物理引擎与游戏引擎的交互、性能优化以及不同类型游戏中物理引擎的应用案例。通过深入分析这些实践案例,我们能够更好地理解物理引擎在现代游戏开发中的重要性和复杂性。随着游戏开发技术的不断进步,物理引擎将会更加精细和高效,为玩家提供更加真实和丰富的游戏体验。
# 5. C++中物理引擎工具和库的使用
## 5.1 主流物理引擎工具介绍
### 5.1.1 Bullet Physics
Bullet Physics是一套开源的物理引擎,广泛应用于游戏开发、电影特效、机器人学等领域能够提供精确的碰撞检测、刚体和软体动力学模拟。它的模块化设计允许开发者只使用引擎中需要的部分,从而优化运行效率和减少应用大小。
Bullet Physics提供了多种物理模拟功能,如:
- **刚体模拟**:计算刚体物体在力的作用下的运动。
- **软体模拟**:包括弹簧质量系统在内的各种模拟软体的算法。
- **布料模拟**:布料模型和约束可以模拟衣服、旗帜等。
- **碰撞检测**:高效快速的碰撞检测机制,支持多种形状检测。
Bullet Physics库使用C++编写,接口友好且易于集成。由于其开源特性,社区支持强大,针对不同操作系统和硬件平台有良好的兼容性。
### 5.1.2 PhysX
由NVIDIA开发的PhysX物理引擎,是当今使用最广泛的商业物理引擎之一。它被广泛应用于高性能的实时物理模拟,在视频游戏中提供了复杂的物理效果,如爆炸、布料、液体等。
PhysX引擎的特点包括:
- **并行计算能力**:利用现代多核处理器进行物理模拟,提供了高性能。
- **多种材质属性**:包括密度、摩擦力、弹性等,支持真实世界物理模拟。
- **先进的碰撞检测算法**:可以处理复杂的几何形状和场景。
- **动态加载和卸载**:允许在运行时动态添加或删除物理对象。
NVIDIA提供的PhysX SDK支持C++和其它主流编程语言,并为游戏开发者提供了丰富的文档和示例代码。
## 5.2 物理引擎工具的安装与配置
### 5.2.1 安装流程与环境设置
#### 安装Bullet Physics
1. 从Bullet Physics官网下载最新的源代码包。
2. 解压到本地工作目录。
3. 进入目录运行配置脚本。在Unix系统下,使用命令:`./configure`;在Windows下,可以使用预编译的二进制安装包。
4. 编译安装。在Unix系统下使用`make`命令,Windows系统则使用提供的安装程序。
#### 安装PhysX
1. 前往NVIDIA PhysX官网下载SDK。
2. 解压并按照文档指示进行安装。
3. 配置项目环境,确保编译器能够找到PhysX的头文件和库文件。
### 5.2.2 集成物理引擎到C++项目中
#### 集成Bullet Physics
1. **添加头文件目录**:将Bullet的头文件路径添加到项目中。
2. **链接库文件**:将Bullet的库文件链接到项目中。在Unix系统中,可能需要使用`-lbullet`参数;在Windows中,需要指定库文件的路径。
3. **初始化和配置**:在程序启动时初始化Bullet Physics,设置物理世界的参数。
#### 集成PhysX
1. **包含PhysX头文件**:在项目中包含PhysX的头文件。
2. **链接PhysX库**:根据安装的PhysX SDK,链接相应的库文件。
3. **初始化SDK**:使用PhysX提供的初始化函数来启动SDK。
4. **创建物理场景**:设置物理世界的参数,创建物理场景(PxScene)。
## 5.3 实际案例分析与代码实战
### 5.3.1 简单游戏项目的物理实现
#### 使用Bullet Physics实现
下面的代码展示如何使用Bullet Physics来模拟一个简单的物理场景,其中有一个球体在重力作用下下落:
```cpp
#include <btBulletDynamicsCommon.h>
#include <LinearMath/btDefaultCollisionConfiguration.h>
#include <BulletCollision/CollisionDispatch/btCollisionDispatcher.h>
#include <BulletCollision/CollisionShapes/btCollisionShape.h>
#include <BulletCollision/CollisionDispatch/btCollisionWorld.h>
int main() {
btDefaultCollisionConfiguration collisionConfiguration;
btCollisionDispatcher dispatcher(&collisionConfiguration);
btBroadphaseInterface broadphase;
btSequentialImpulseConstraintSolver solver;
btDiscreteDynamicsWorld dynamicsWorld(&dispatcher, &broadphase, &solver, &collisionConfiguration);
dynamicsWorld.setGravity(btVector3(0, -9.81, 0));
btCollisionShape* groundShape = new btStaticPlaneShape(btVector3(0, 1, 0), 1);
btCollisionShape* ballShape = new btSphereShape(1);
btDefaultMotionState* groundMotionState = new btDefaultMotionState(btTransform(btQuaternion(0, 0, 0, 1), btVector3(0, -1, 0)));
btRigidBody::btRigidBodyConstructionInfo groundRigidBodyCI(0, groundMotionState, groundShape, btVector3(0, 0, 0));
btRigidBody* groundBody = new btRigidBody(groundRigidBodyCI);
btDefaultMotionState* ballMotionState = new btDefaultMotionState(btTransform(btQuaternion(0, 0, 0, 1), btVector3(0, 10, 0)));
btScalar mass(1.f);
btVector3 localInertia(0, 0, 0);
ballShape->calculateLocalInertia(mass, localInertia);
btRigidBody::btRigidBodyConstructionInfo ballRigidBodyCI(mass, ballMotionState, ballShape, localInertia);
btRigidBody* ballBody = new btRigidBody(ballRigidBodyCI);
dynamicsWorld.addRigidBody(groundBody);
dynamicsWorld.addRigidBody(ballBody);
for (int i = 0; i < 240; ++i) {
dynamicsWorld.stepSimulation(1/60.f, 10);
btTransform transform;
ballBody->getMotionState()->getWorldTransform(transform);
btVector3 pos = transform.getOrigin();
printf("Ball position: %f %f %f\n", pos.getX(), pos.getY(), pos.getZ());
}
// cleanup
delete groundShape;
delete ballShape;
delete groundBody;
delete ballBody;
delete groundMotionState;
delete ballMotionState;
return 0;
}
```
### 5.3.2 物理事件和游戏逻辑的耦合
耦合物理事件与游戏逻辑是实现复杂交互的关键。在上面的代码基础上,我们可以进一步加入用户输入和物理事件的处理来展示如何将物理事件和游戏逻辑相结合。
```cpp
// ...之前的代码
// 示例代码段,捕捉到球体触地事件并做出反应。
bool hitGround = false;
for (int i = 0; i < 240; ++i) {
dynamicsWorld.stepSimulation(1/60.f, 10);
// 检查球体是否与地面发生了碰撞
const int numManifolds = dynamicsWorld.getDispatcher()->getNumManifolds();
for (int i = 0; i < numManifolds; i++) {
btPersistentManifold* contactManifold = dynamicsWorld.getDispatcher()->getManifoldByIndexInternal(i);
if (contactManifold->getNumContacts() > 0) {
hitGround = true;
// 执行球体触地的逻辑,比如弹跳、消失等
ballBody->setLinearVelocity(btVector3(0, 0, 0));
ballBody->setAngularVelocity(btVector3(0, 0, 0));
// 重置球体位置
btTransform transform;
transform.setIdentity();
transform.setOrigin(btVector3(0, 10, 0));
ballBody->getMotionState()->setWorldTransform(transform);
}
}
btTransform transform;
ballBody->getMotionState()->getWorldTransform(transform);
btVector3 pos = transform.getOrigin();
printf("Ball position: %f %f %f\n", pos.getX(), pos.getY(), pos.getZ());
}
// ...之后的代码
```
本章节介绍了物理引擎工具的介绍与安装,通过实际的案例分析和代码实战,演示了如何将物理引擎集成到C++游戏开发项目中,并给出了相关的优化和应用场景。通过本章的学习,开发者将能够熟练掌握主流物理引擎在游戏开发中的使用方法。
# 6. 未来趋势与挑战
## 6.1 物理引擎技术的未来发展方向
随着科技的进步和用户需求的不断提升,物理引擎技术也在不断地发展中。新技术的应用正推动着物理引擎不断地向前发展,它将如何适应未来的需求和挑战呢?
### 6.1.1 云计算与分布式物理模拟
云计算为物理模拟提供了一个全新的平台。通过云资源,物理引擎可以在服务器端进行大规模和高精度的模拟,同时将结果传输到客户端,以实现复杂的物理交互和游戏体验。这种分布式物理模拟不仅提高了模拟的效率和精度,还可以支持更多的玩家在同一游戏世界中进行交互。
### 6.1.2 人工智能与自适应物理引擎
人工智能(AI)的融入将使物理引擎更加智能和灵活。未来的物理引擎可能会结合机器学习算法,使得它们能够根据游戏中的交互和反馈自我学习,调整物理参数来适应不同的游戏场景和玩家行为。这种自适应的物理引擎能提供更加真实和动态的游戏体验。
## 6.2 面临的挑战与解决方案
尽管物理引擎技术的发展前景广阔,但同样也面临着一系列挑战。以下为其中的一些主要挑战以及潜在的解决方案。
### 6.2.1 跨平台兼容性问题
随着设备的多样化,物理引擎需要在不同平台和设备上提供一致的游戏体验。跨平台兼容性问题成为了一个挑战。
为了应对这一挑战,可以采取以下措施:
- **标准化开发流程**:制定统一的API和接口,简化跨平台开发。
- **中间件的使用**:使用跨平台开发框架和中间件来处理不同平台间的兼容性问题。
- **模块化设计**:物理引擎应以模块化的方式构建,以便在不同的硬件和操作系统上轻松部署。
### 6.2.2 物理引擎的调试与维护策略
物理引擎的调试和维护在游戏开发中是一个复杂的过程,需要高水平的专业知识。为了简化这一过程,可以使用以下策略:
- **可视化调试工具**:开发高级的可视化工具,以帮助开发者直观地理解物理引擎的运行状态。
- **单元测试和自动化测试**:实施单元测试和自动化测试,以确保物理引擎的各个组件稳定可靠。
- **文档和社区支持**:提供详尽的文档和建立活跃的开发者社区,以便在遇到问题时能够快速找到帮助和解决方案。
在本章中,我们探讨了物理引擎技术未来的潜在发展方向,以及将面临的挑战。同时,我们也提出了针对性的解决方案。接下来,在第七章中,我们将回顾全文,并对物理引擎在游戏开发中的重要性和未来进行总结。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《C++在游戏物理引擎中的实现》专栏深入探讨了C++在游戏物理引擎中的应用。文章涵盖了从物理引擎构建的关键技巧到性能优化策略等各个方面。专栏还提供了关于内存管理、调试技术和常见问题追踪的实用指南。通过深入浅出的讲解和丰富的示例,该专栏旨在帮助游戏开发者掌握物理引擎的实现和应用,从而提升游戏开发效率和质量。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
ROST软件数据可视化技巧:让你的分析结果更加直观动人
:max_bytes(150000):strip_icc()/ScreenShot2019-10-28at1.25.36PM-ab811841a30d4ee5abb2ff63fd001a3b.jpg)
参考资源链接:[ROST内容挖掘系统V6用户手册:功能详解与操作指南](https://wenku.csdn.net/doc/5c20fd2fpo?spm=1055.2635.3001.10343)
RTCM 3.3协议深度剖析:如何构建秒级精准定位系统
参考资源链接:[RTCM 3.3协议详解:全球卫星导航系统差分服务最新标准](https://wenku.csdn.net/doc/7mrszjnfag?spm=1055.2635.3001.10343)
# 1. RTCM 3.3协议简介及其在精准定位中的作用
RTCM (Radio Technical Co
提升航空数据传输效率:AFDX网络数据流管理技巧
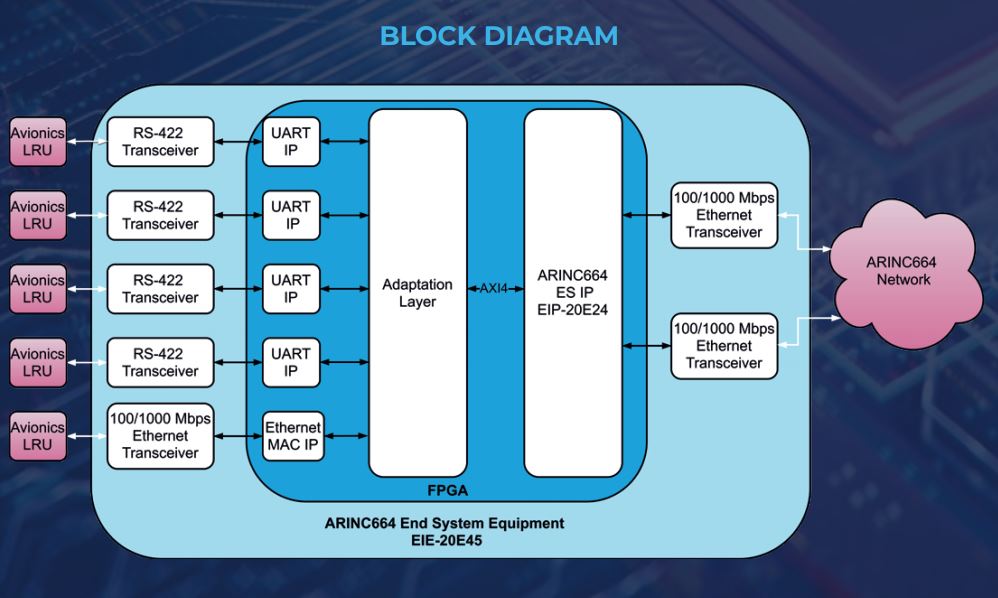
参考资源链接:[AFDX协议/ARINC664中文详解:飞机数据网络](https://wenku.csdn.net/doc/66azonqm6a?spm=1055.2635.3001.10343)
# 1. AFDX网络技术概述
## 1.1 AFDX网络技术的起源与应用背景
AFDX (Avionics Full-Duplex Switched Ethernet) 网络技术,是专为航空电子通信设计
软件开发者必读:与MIPI CSI-2对话的驱动开发策略
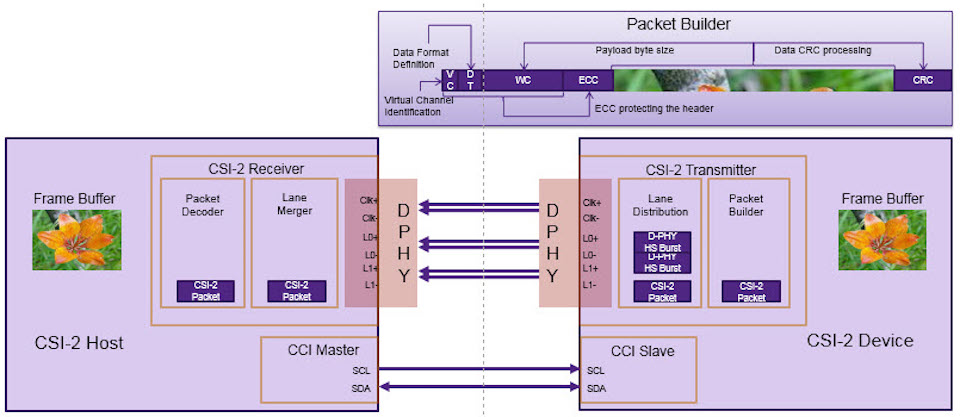
参考资源链接:[mipi-CSI-2-标准规格书.pdf](https://wenku.csdn.net/doc/64701608d12cbe7ec3f6856a?spm=1055.2635.3001.10343)
# 1. MIPI CSI-2协议概述
在当今数字化和移动化的世界里,移动设备图像性能的提升是用户体验的关键部分。为
【PCIe接口新革命】:5.40a版本数据手册揭秘,加速硬件兼容性分析与系统集成
参考资源链接:[2019 Synopsys PCIe Endpoint Databook v5.40a:设计指南与版权须知](https://wenku.csdn.net/doc/3rfmuard3w?spm=1055.2635.3001.10343)
# 1. PCIe接口技术概述
PCIe( Peripheral Component Interconnect Express)是一种高速串行计算机扩展总线标准,被广泛应用于计算机内部连接高速组件。它以点对点连接的方式,能够提供比传统PCI(Peripheral Component Interconnect)总线更高的数据传输率。PCIe的进
ZMODEM协议的高级特性:流控制与错误校正机制的精妙之处

参考资源链接:[ZMODEM传输协议深度解析](https://wenku.csdn.net/doc/647162cdd12cbe7ec3ff9be7?spm=1055.2635.3001.10343)
# 1. ZMODEM协议简介
## 1.1 什么是ZMODEM协议
ZMODEM是一种在串行通信中广泛使用的文件传输协议,它支持二进制数据传输,并可以对数据进行分块处理,确保文件完整无误地传输到目标系统。与早期的XMODEM和YMODEM协
IS903优盘通信协议揭秘:USB通信流程的全面解读

参考资源链接:[银灿IS903优盘完整的原理图](https://wenku.csdn.net/doc/6412b558be7fbd1778d42d25?spm=1055.2635.3001.10343)
# 1. USB通信协议概述
USB(通用串行总线)通信协议自从1996年首次推出以来,已经成为个人计算机和其他电子设备中最普遍的接口技术之一。该章节将概述USB通信协议的基础知识,为后续章节深入探讨USB的硬件结构、信号传输和通信流程等主题打
【功能拓展】创维E900 4K机顶盒应用管理:轻松安装与管理指南
参考资源链接:[创维E900 4K机顶盒快速配置指南](https://wenku.csdn.net/doc/645ee5ad543f844488898b04?spm=1055.2635.3001.10343)
# 1. 创维E900 4K机顶盒概述
在本章中,我们将揭开创维E900 4K机顶盒的神秘面纱,带领读者了解这一强大的多媒体设备的基本信息。我们将从其设计理念讲起,探索它如何为家庭娱乐带来高清画质和智能功能。本章节将为读者提供一个全面的概览,包括硬件配置、操作系统以及它在市场中的定位,为后续章节中关于设置、应用使用和维护等更深入的讨论打下坚实的基础。
创维E900 4K机顶盒采用先
【cx_Oracle数据库管理】:全面覆盖连接、事务、性能与安全性

参考资源链接:[cx_Oracle使用手册](https://wenku.csdn.net/doc/6476de87543f84448808af0d?spm=1055.2635.3001.10343)
# 1. cx_Oracle数据库基础介绍
cx_Oracle 是一个
【深度学习的交通预测力量】:构建上海轨道交通2030的智能预测模型

参考资源链接:[上海轨道交通规划图2030版-高清](https://wenku.csdn.net/doc/647ff0fc
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )