揭秘YOLO目标检测:10个实战案例带你玩转目标检测
发布时间: 2024-08-20 08:24:44 阅读量: 199 订阅数: 28 

Yolov4darknet含训练和识别部分已经例子模板
# 1. YOLO目标检测概述
YOLO(You Only Look Once)是一种实时目标检测算法,因其速度快、精度高而闻名。与传统的目标检测算法不同,YOLO将整个图像作为输入,并一次性预测所有目标的边界框和类别。这种单次检测机制使其具有极高的效率。
YOLO算法于2015年由Joseph Redmon等人提出,自此以来,它已发展了多个版本,包括YOLOv2、YOLOv3和YOLOv4。每个版本都引入了改进,例如更快的处理速度、更高的准确性和对新功能的支持。
# 2. YOLO算法理论与实践
### 2.1 YOLOv1算法原理
**概述**
YOLOv1(You Only Look Once)是一种单次卷积神经网络,用于实时目标检测。它将图像划分为网格,并预测每个网格单元中存在的对象及其边界框。
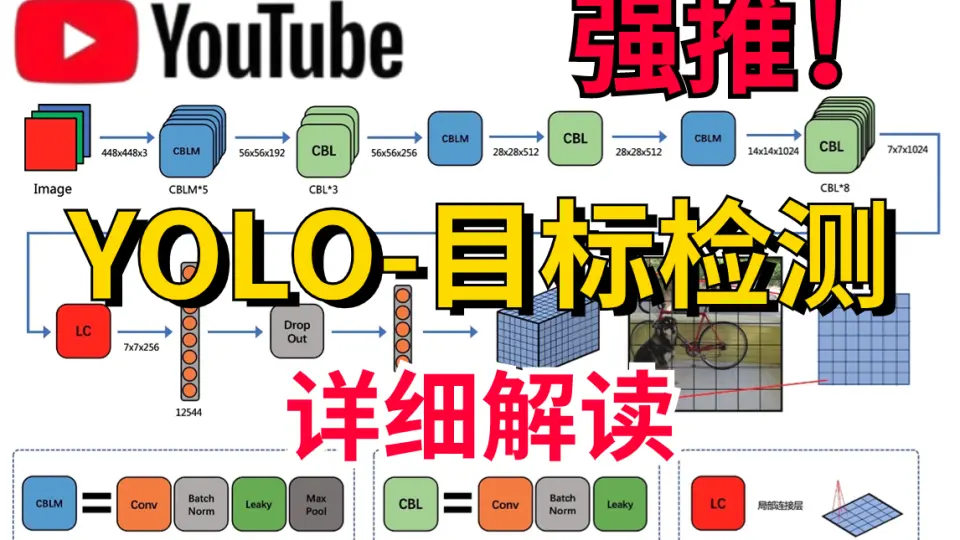
**架构**
YOLOv1架构包括:
- **卷积层:**提取图像特征。
- **全连接层:**预测每个网格单元的边界框和置信度。
- **损失函数:**结合边界框回归损失和分类损失。
**算法流程**
YOLOv1算法流程如下:
1. **图像预处理:**将图像调整为固定大小并归一化。
2. **特征提取:**通过卷积层提取图像特征。
3. **网格划分:**将图像划分为网格单元。
4. **边界框预测:**每个网格单元预测B个边界框及其置信度。
5. **非极大值抑制(NMS):**删除重叠率高的边界框,保留置信度最高的边界框。
**代码示例**
```python
import cv2
import numpy as np
def yolo_v1(image):
# 图像预处理
image = cv2.resize(image, (448, 448))
image = image / 255.0
# 特征提取
features = ... # 使用预训练的卷积网络提取特征
# 网格划分
grid_size = 7
grid_cells = np.zeros((grid_size, grid_size, 5))
# 边界框预测
for i in range(grid_size):
for j in range(grid_size):
for b in range(B):
grid_cells[i, j, b] = ... # 预测边界框和置信度
# 非极大值抑制
boxes = ... # 从网格单元中提取边界框
confidences = ... # 从网格单元中提取置信度
nms_boxes = cv2.dnn.NMSBoxes(boxes, confidences, 0.5, 0.4)
return nms_boxes
```
**逻辑分析**
* `yolo_v1()`函数接收图像作为输入,并返回检测到的边界框。
* `cv2.resize()`和`cv2.dnn.NMSBoxes()`是OpenCV函数,用于图像预处理和非极大值抑制。
* `features`变量存储通过卷积网络提取的图像特征。
* `grid_cells`数组存储每个网格单元预测的边界框和置信度。
* `boxes`和`confidences`变量从`grid_cells`数组中提取边界框和置信度。
* `cv2.dnn.NMSBoxes()`函数执行非极大值抑制,删除重叠率高的边界框。
### 2.2 YOLOv2算法改进
**改进**
YOLOv2对YOLOv1进行了多项改进,包括:
- **Batch Normalization:**提高训练稳定性。
- **Anchor Boxes:**使用预定义的边界框形状,提高边界框预测精度。
- **维度聚类:**根据训练数据中的边界框形状聚类Anchor Boxes。
**代码示例**
```python
def yolo_v2(image):
# 图像预处理
image = cv2.resize(image, (416, 416))
image = image / 255.0
# 特征提取
features = ... # 使用预训练的卷积网络提取特征
# Anchor Boxes
anchor_boxes = ... # 预定义的Anchor Boxes
# 边界框预测
for i in range(grid_size):
for j in range(grid_size):
for b in range(B):
grid_cells[i, j, b] = ... # 预测边界框和置信度
# 非极大值抑制
boxes = ... # 从网格单元中提取边界框
confidences = ... # 从网格单元中提取置信度
nms_boxes = cv2.dnn.NMSBoxes(boxes, confidences, 0.5, 0.4)
return nms_boxes
```
**逻辑分析**
* `yolo_v2()`函数与`yolo_v1()`函数类似,但使用Anchor Boxes进行边界框预测。
* `anchor_boxes`变量存储预定义的Anchor Boxes。
* 在边界框预测循环中,Anchor Boxes用于指导网络预测每个网格单元的边界框形状。
### 2.3 YOLOv3算法优化
**优化**
YOLOv3对YOLOv2进行了进一步优化,包括:
- **Darknet-53骨干网络:**更深的卷积神经网络,提取更丰富的特征。
- **Residual Connections:**跳过连接,改善梯度流。
- **Feature Pyramid Network(FPN):**融合不同尺度的特征,提高小目标检测精度。
**代码示例**
```python
def yolo_v3(image):
# 图像预处理
image = cv2.resize(image, (416, 416))
image = image / 255.0
# 特征提取
features = ... # 使用Darknet-53骨干网络提取特征
# FPN
fpn_features = ... # 融合不同尺度的特征
# 边界框预测
for i in range(grid_size):
for j in range(grid_size):
for b in range(B):
grid_cells[i, j, b] = ... # 预测边界框和置信度
# 非极大值抑制
boxes = ... # 从网格单元中提取边界框
confidences = ... # 从网格单元中提取置信度
nms_boxes = cv2.dnn.NMSBoxes(boxes, confidences, 0.5, 0.4)
return nms_boxes
```
**逻辑分析**
* `yolo_v3()`函数使用Darknet-53骨干网络和FPN提取特征。
* `fpn_features`变量存储融合不同尺度的特征。
* 在边界框预测循环中,FPN特征用于提高小目标检测精度。
# 3.1 图像目标检测
**图像目标检测的原理**
图像目标检测是计算机视觉中的一项基本任务,其目标是识别和定位图像中的对象。YOLO(You Only Look Once)算法是一种流行的目标检测算法,它使用单次卷积神经网络(CNN)来同时预测图像中的所有对象及其边界框。
YOLO算法的原理如下:
1. **输入图像:**将输入图像馈入CNN。
2. **特征提取:**CNN提取图像的特征,生成特征图。
3. **网格划分:**将特征图划分为一个网格,每个网格单元负责检测图像中的一小部分区域。
4. **边界框预测:**每个网格单元预测一个边界框,该边界框表示该单元格中可能存在对象的概率。
5. **类别预测:**每个网格单元还预测一个类别概率分布,该分布表示该单元格中可能存在对象的类别。
6. **非极大值抑制(NMS):**NMS算法用于从每个网格单元的预测中选择最可能的边界框,并抑制冗余的预测。
**YOLO算法的优点**
YOLO算法具有以下优点:
- **速度快:**YOLO算法使用单次CNN进行检测,因此速度非常快。
- **准确率高:**YOLO算法的准确率与其他目标检测算法相当,甚至更高。
- **易于实现:**YOLO算法的实现相对简单,易于部署到实际应用中。
**YOLO算法的应用**
YOLO算法广泛应用于图像目标检测领域,包括:
- 人脸检测
- 物体检测
- 车辆检测
- 行人检测
- 缺陷检测
- 医疗影像分析
- 安防监控
- 自动驾驶
- 机器人导航
- 工业检测
### 代码示例
以下代码示例演示了如何使用YOLOv5算法进行图像目标检测:
```python
import cv2
import numpy as np
import torch
# 加载YOLOv5模型
model = torch.hub.load('ultralytics/yolov5', 'yolov5s')
# 加载输入图像
image = cv2.imread('image.jpg')
# 预处理图像
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
image = cv2.resize(image, (640, 640))
image = image.astype(np.float32)
image /= 255.0
# 将图像转换为张量
image = torch.from_numpy(image).to(model.device)
image = image.unsqueeze(0)
# 进行目标检测
with torch.no_grad():
predictions = model(image)
# 解析预测结果
for pred in predictions:
# 获取边界框和类别
boxes = pred[:, :4]
classes = pred[:, 5:]
# 过滤低置信度的预测
scores = pred[:, 4]
keep = torch.where(scores > 0.5)
boxes = boxes[keep]
classes = classes[keep]
# 将边界框转换为图像坐标
boxes[:, 0] *= image.shape[1]
boxes[:, 1] *= image.shape[0]
boxes[:, 2] *= image.shape[1]
boxes[:, 3] *= image.shape[0]
# 绘制边界框和类别标签
for box, cls in zip(boxes, classes):
cv2.rectangle(image, (int(box[0]), int(box[1])), (int(box[2]), int(box[3])), (0, 255, 0), 2)
cv2.putText(image, f'{cls.item()}', (int(box[0]), int(box[1] - 5)), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 2)
# 显示检测结果
cv2.imshow('Image', image)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**代码逻辑分析**
1. 加载YOLOv5模型。
2. 加载输入图像并进行预处理。
3. 将图像转换为张量。
4. 进行目标检测。
5. 解析预测结果,包括边界框、类别和置信度。
6. 过滤低置信度的预测。
7. 将边界框转换为图像坐标。
8. 绘制边界框和类别标签。
9. 显示检测结果。
**参数说明**
- `model`:YOLOv5模型。
- `image`:输入图像。
- `predictions`:模型预测结果。
- `boxes`:边界框坐标。
- `classes`:类别标签。
- `scores`:置信度分数。
- `keep`:置信度大于0.5的预测索引。
# 4. YOLO进阶应用
### 4.1 YOLO与其他目标检测算法对比
| 算法 | 速度(FPS) | 精度(mAP) | 适用场景 |
|---|---|---|---|
| YOLOv5 | 140+ | 56.8% | 实时目标检测、视频目标检测 |
| Faster R-CNN | 5-15 | 79.3% | 高精度目标检测 |
| SSD | 50-100 | 74.3% | 实时目标检测、图像目标检测 |
| Mask R-CNN | 5-15 | 82.3% | 实例分割、目标检测 |
**对比分析:**
* YOLOv5在速度上具有明显优势,适合实时目标检测和视频目标检测等应用场景。
* Faster R-CNN和Mask R-CNN在精度上更高,但速度较慢,适用于高精度目标检测和实例分割等任务。
* SSD在速度和精度上介于YOLOv5和Faster R-CNN之间,适合图像目标检测等应用。
### 4.2 YOLO在特定场景的应用
**示例:**
* **安防监控:**利用YOLO进行实时目标检测,识别入侵者、异常行为等。
* **医疗影像分析:**利用YOLO检测X光片中的病变区域,辅助医生诊断。
* **自动驾驶:**利用YOLO检测道路上的行人、车辆、障碍物等,辅助自动驾驶系统做出决策。
**优化方法:**
* **数据增强:**针对特定场景,对训练数据进行旋转、裁剪、翻转等增强,提升模型的泛化能力。
* **模型微调:**在预训练模型的基础上,针对特定场景进行微调,提升模型的准确性。
* **后处理优化:**利用非极大值抑制(NMS)等后处理技术,去除冗余检测框,提升检测精度。
### 4.3 YOLO算法的定制与优化
**代码示例:**
```python
import torch
import torch.nn as nn
class CustomYOLOv5(nn.Module):
def __init__(self, num_classes):
super().__init__()
# ...
def forward(self, x):
# ...
return output
# 实例化模型
model = CustomYOLOv5(num_classes=80)
# 加载预训练权重
model.load_state_dict(torch.load('yolov5s.pt'))
# 针对特定场景微调模型
optimizer = torch.optim.Adam(model.parameters(), lr=0.001)
for epoch in range(100):
# ...
```
**逻辑分析:**
* `CustomYOLOv5`类继承自`nn.Module`,定义了定制的YOLOv5模型。
* `forward`方法定义了模型的前向传播过程。
* `model`实例化了定制的YOLOv5模型,并加载了预训练权重。
* `optimizer`定义了优化器,用于微调模型。
* 训练循环对模型进行微调,提升其在特定场景下的性能。
**参数说明:**
* `num_classes`:目标类别数量。
* `lr`:学习率。
* `epoch`:训练轮数。
# 5. YOLO实战案例**
**5.1 人脸检测**
YOLO在人脸检测领域有着广泛的应用。其快速且准确的检测能力使其成为实时人脸识别和验证的理想选择。例如,在门禁系统中,YOLO可以用于快速识别授权人员,并拒绝未经授权的人员进入。
**5.2 物体检测**
YOLO还广泛用于物体检测任务。它可以检测各种对象,包括汽车、家具、电子产品等。这种能力使其在零售、库存管理和质量控制等行业中具有广泛的应用。例如,在零售商店中,YOLO可以用于自动识别商品,并提供有关其位置和数量的信息。
**5.3 车辆检测**
YOLO在车辆检测领域也表现出色。它可以检测各种车辆,包括汽车、卡车、摩托车和自行车。这种能力使其在交通管理、自动驾驶和安防监控等领域具有广泛的应用。例如,在交通管理系统中,YOLO可以用于检测违章车辆,并向执法部门发出警报。
**5.4 行人检测**
YOLO还可用于行人检测。它可以检测行人,并估计其位置和姿势。这种能力使其在行人安全、交通管理和安防监控等领域具有广泛的应用。例如,在行人安全系统中,YOLO可以用于检测行人,并向驾驶员发出警报,以防止碰撞。
**5.5 缺陷检测**
YOLO在缺陷检测领域也具有潜力。它可以检测各种缺陷,包括裂纹、划痕和凹痕。这种能力使其在制造、质量控制和安防监控等行业具有广泛的应用。例如,在制造业中,YOLO可以用于检测产品缺陷,并防止有缺陷的产品流入市场。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
YOLO目标检测技术解析专栏深入探讨了YOLO算法的原理、应用和优化技巧。通过10个实战案例,读者可以掌握YOLO在安防、自动驾驶、医疗影像、工业检测、零售、体育、金融、科研、军事、交通、能源、农业和教育等领域的应用。专栏还提供了YOLOv5算法性能提升的秘诀,模型训练优化技巧,数据集构建指南,以及YOLO在不同领域的优缺点分析。通过阅读本专栏,读者可以全面了解YOLO目标检测技术,并将其应用于实际场景中,推动各行业的发展。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
JY01A直流无刷IC全攻略:深入理解与高效应用

# 摘要
本文详细介绍了JY01A直流无刷IC的设计、功能和应用。文章首先概述了直流无刷电机的工作原理及其关键参数,随后探讨了JY01A IC的功能特点以及与电机集成的应用。在实践操作方面,本文讲解了JY01A IC的硬件连接、编程控制,并通过具体
【S参数转换表准确性】:实验验证与误差分析深度揭秘
# 摘要
本文详细探讨了S参数转换表的准确性问题,首先介绍了S参数的基本概念及其在射频领域的应用,然后通过实验验证了S参数转换表的准确性,并分析了可能的误差来源,包括系统误差和随机误差。为了减小误差,本文提出了一系列的硬件优化措施和软件算法改进策略。最后,本文展望了S参数测量技术的新进展和未来的研究方向,指出了理论研究和实际应用创新的重要性。
# 关键字
S参
【TongWeb7内存管理教程】:避免内存泄漏与优化技巧
# 摘要
本文旨在深入探讨TongWeb7的内存管理机制,重点关注内存泄漏的理论基础、识别、诊断以及预防措施。通过详细阐述内存池管理、对象生命周期、分配释放策略和内存压缩回收技术,文章为提升内存使用效率和性能优化提供了实用的技术细节。此外,本文还介绍了一些性能优化的基本原则和监控分析工具的应用,以及探讨了企业级内存管理策略、自动内存管理工具和未来内存管理技术的发展趋
无线定位算法优化实战:提升速度与准确率的5大策略
# 摘要
本文综述了无线定位技术的原理、常用算法及其优化策略,并通过实际案例分析展示了定位系统的实施与优化。第一章为无线定位技术概述,介绍了无线定位技术的基础知识。第二章详细探讨了无线定位算法的分类、原理和常用算法,包括距离测量技术和具体定位算法如三角测量法、指纹定位法和卫星定位技术。第三章着重于提升定位准确率、加速定位速度和节省资源消耗的优化策略。第四章通过分析室内导航系统和物联网设备跟踪的实际应用场景,说明了定位系统优化实施
成本效益深度分析:ODU flex-G.7044网络投资回报率优化
# 摘要
本文旨在介绍ODU flex-G.7044网络技术及其成本效益分析。首先,概述了ODU flex-G.7044网络的基础架构和技术特点。随后,深入探讨成本效益理论,包括成本效益分析的基本概念、应用场景和局限性,以及投资回报率的计算与评估。在此基础上,对ODU flex-G.7044网络的成本效益进行了具体分析,考虑了直接成本、间接成本、潜在效益以及长期影响。接着,提出优化投资回报
【Delphi编程智慧】:进度条与异步操作的完美协调之道

# 摘要
本文旨在深入探讨Delphi编程环境中进度条的使用及其与异步操作的结合。首先,基础章节解释了进度条的工作原理和基础应用。随后,深入研究了Delphi中的异步编程机制,包括线程和任务管理、同步与异步操作的原理及异常处理。第三章结合实
C语言编程:构建高效的字符串处理函数
# 摘要
字符串处理是编程中不可或缺的基础技能,尤其在C语言中,正确的字符串管理对程序的稳定性和效率至关重要。本文从基础概念出发,详细介绍了C语言中字符串的定义、存储、常用操作函数以及内存管理的基本知识。在此基础上,进一步探讨了高级字符串处理技术,包括格式化字符串、算法优化和正则表达式的应用。
【抗干扰策略】:这些方法能极大提高PID控制系统的鲁棒性
# 摘要
PID控制系统作为一种广泛应用于工业过程控制的经典反馈控制策略,其理论基础、设计步骤、抗干扰技术和实践应用一直是控制工程领域的研究热点。本文从PID控制器的工作原理出发,系统介绍了比例(P)、积分(I)、微分(D)控制的作用,并探讨了系统建模、控制器参数整定及系统稳定性的分析方法。文章进一步分析了抗干扰技术,并通过案例分析展示了PID控制在工业温度和流量控制系统中的优化与仿真。最后,文章展望了PID控制系统的高级扩展,如
业务连续性的守护者:中控BS架构考勤系统的灾难恢复计划

# 摘要
本文旨在探讨中控BS架构考勤系统的业务连续性管理,概述了业务连续性的重要性及其灾难恢复策略的制定。首先介绍了业务连续性的基础概念,并对其在企业中的重要性进行了详细解析。随后,文章深入分析了灾难恢复计划的组成要素、风险评估与影响分析方法。重点阐述了中控BS架构在硬件冗余设计、数据备份与恢复机制以及应急响应等方面的策略。
自定义环形菜单
# 摘要
本文探讨了环形菜单的设计理念、理论基础、开发实践、测试优化以及创新应用。首先介绍了环形菜单的设计价值及其在用户交互中的应用。接着,阐述了环形菜单的数学基础、用户交互理论和设计原则,为深入理解环形菜单提供了坚实的理论支持。随后,文章详细描述了环形菜单的软件实现框架、核心功能编码以及界面与视觉设计的开发实践。针对功能测试和性能优化,本文讨论了测试方法和优化策略,确保环形菜单的可用性和高效性。最后,展望了环形菜单在新兴领域的
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )