




ROS环境搭建深度解析:不同操作系统下的安装策略详解


机器人操作系统ROS2在Docker环境下安装详解与应用
摘要
本文旨在详细指导ROS(Robot Operating System)环境在不同操作系统(Linux、Windows、macOS)下的搭建策略。文章首先概述了ROS环境搭建的总体要求和步骤,然后分别针对Linux、Windows和macOS系统提供了详尽的安装和配置指南,包括系统准备、ROS软件源添加、安装确认以及环境变量配置等关键步骤。进一步,文章探讨了如何在各个平台上进行ROS环境的高级优化和安全配置,比如系统性能优化、节点管理和调试,以及环境的定制化与安全。通过本文的指导,读者能够有效地在多平台部署ROS环境,为机器人软件开发和应用提供稳固的基础。
关键字
ROS安装;Linux;Windows;macOS;环境配置;性能优化
参考资源链接:Ubuntu系统下ROS Noetic安装与配置指南
1. ROS环境搭建概述
ROS简介及其重要性
ROS(Robot Operating System)是一个灵活的框架,用于编写机器人软件。它提供了一套工具、库和约定,用于帮助软件开发者创建复杂且可靠的机器人行为。ROS广泛应用于教育、研究以及商业项目中,被认为是当前机器人领域的标准框架之一。为了高效利用ROS,搭建一个合适的工作环境显得至关重要。
搭建环境的目标
搭建ROS环境的主要目标是创建一个稳定、高效的工作环境,这样开发者可以专注于编写和测试他们的机器人应用程序,而不必担心底层的系统配置和兼容性问题。此外,环境搭建还应该考虑到易于维护和扩展,以便在项目发展过程中进行必要的升级。
环境搭建的基本步骤
环境搭建过程涉及一系列步骤,包括检查操作系统兼容性、安装ROS及其依赖包、配置环境变量以及创建和管理ROS工作空间。这些步骤将为后续的ROS学习和开发工作奠定坚实的基础。在接下来的章节中,我们将详细讨论在不同操作系统下搭建ROS环境的具体步骤。
2. ROS在Linux系统下的安装策略
2.1 ROS安装前的系统准备
2.1.1 系统环境的要求
在进行ROS安装之前,首先需要确保你的Linux系统满足基本的运行要求。ROS支持的Ubuntu版本主要包括Ubuntu 16.04 LTS, Ubuntu 18.04 LTS, 和Ubuntu 20.04 LTS等长期支持版本。目前ROS Noetic支持Ubuntu 20.04,ROS Melodic支持Ubuntu 18.04,ROS Kinetic支持Ubuntu 16.04。
- 内核版本:建议使用最新的稳定版内核。
- 内存:至少2GB的RAM,但推荐使用更多的内存,特别是当你计划运行多个复杂的ROS节点时。
- 硬盘空间:至少需要20GB的硬盘空间,但实际上,对于一个典型的ROS安装和一些轻量级的项目,10GB左右的空间就足够了。
- 网络连接:ROS安装过程中需要下载大量的数据包,因此稳定的互联网连接是必需的。
2.1.2 系统依赖包的安装
在安装ROS之前,需要安装一系列系统依赖包,以确保ROS能够正常工作。可以通过以下命令在Ubuntu系统上安装这些依赖包:
- sudo apt update
- sudo apt install -y python-rosdep python-rosinstall-generator python-wstool build-essential python-rosinstall
代码解释:
sudo apt update: 更新系统的包索引。sudo apt install -y: 安装依赖包,-y参数表示安装过程中的确认自动回答为"yes",不进行任何交互。python-rosdep,python-rosinstall-generator,python-wstool,build-essential,python-rosinstall: 这些是安装ROS所需要的依赖包。
完成这些依赖的安装后,还需初始化rosdep。rosdep是一个用于安装系统依赖和在构建ROS包前对其进行初始化的工具。
- sudo rosdep init
- rosdep update
2.2 ROS安装过程详解
2.2.1 添加ROS软件源
接下来,需要添加ROS的软件源。这可以通过修改软件源列表文件实现。你可以直接编辑/etc/apt/sources.list文件,或者创建一个新的文件/etc/apt/sources.list.d/ros-latest.list。例如,对于ROS Melodic,你可以添加以下行:
- deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main
这个命令会添加一个指向ROS官方软件源的行,其中$(lsb_release -sc)会被替换为当前系统的稳定版本代号(如bionic, focal等)。
2.2.2 安装ROS及其工具包
在添加了软件源之后,需要将rosdep初始化的条目更新到系统的软件包列表中,然后安装ROS Melodic和ros-base工具包:
- sudo apt update
- sudo apt install ros-melodic-desktop-full
ros-melodic-desktop-full是一个包含所有ROS桌面组件和额外工具的安装包,适合进行开发和实验。
2.2.3 验证ROS安装
安装完成后,需要初始化rosdep以确保ROS包能正确安装所需的依赖:
- sudo rosdep init
- rosdep update
然后,使ROS环境变量生效:
- echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
- source ~/.bashrc
使用roscore命令测试ROS是否安装成功:
- roscore
如果安装成功,roscore命令会启动ROS的主节点。
2.3 ROS环境配置
2.3.1 设置环境变量
安装完ROS后,需要将ROS的环境变量添加到你的shell中。这样,当你打开新的终端窗口时,ROS命令将直接可用。
- echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
- source ~/.bashrc
2.3.2 配置ROS工作空间
工作空间是ROS程序的组织和编译单元。创建一个工作空间的步骤包括:
- mkdir -p ~/catkin_ws/src
- cd ~/catkin_ws/
- catkin_make
- echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
- source ~/.bashrc
代码逻辑分析:
mkdir -p ~/catkin_ws/src: 创建一个名为catkin_ws的新工作空间,并在其中创建一个名为src的目录,用于存放源代码。cd ~/catkin_ws/: 切换当前工作目录到新建的工作空间。catkin_make: 编译工作空间。echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc: 将ROS工作空间的环境变量添加到.bashrc文件,这样每次打开终端时都会自动加载工作空间。source ~/.bashrc: 应用对.bashrc的更改,使得环境变量立即生效。
接下来,你可以通过创建一个简单的ROS包来测试你的工作空间配置是否正确。
完成这些步骤之后,ROS系统在Linux系统下的安装和环境配置就完成了。通过实践上述步骤,你可以确保ROS在你的Linux环境中运行稳定,为后续的开发和应用打下坚实的基础。
3. ROS在Windows系统下的安装策略
3.1 Windows系统下的ROS安装前提
3.1.1 兼容性检查
在开始安装ROS之前,我们需要确保Windows系统兼容我们想要安装的ROS版本。当前,Windows系统的ROS支持主要还是依赖于Ubuntu子系统(Windows Subsystem for Linux,简称WSL),它允许在Windows上运行Linux环境。截至ROS Noetic版本,官方推荐使用Ubuntu 20.04作为开发环境,因此你需要检查你的Windows系统是否支持运行WSL 2以及Ubuntu 20.04。
在安装之前,请确保你的Windows系统满足以下要求:
- Windows 10版本2004及更高版本(Build 19041及以上),或Windows 11。
- 开启虚拟机平台和Linux子系统功能。
- CPU支持虚拟化技术,并在BIOS中启用。
可以通过运行以下命令检查WSL版本:
- wsl --set-default-version 2
如果看到错误提示“WSL 2 requires an update to its kernel component”,则需要更新WSL2 Linux内核。更新后,可以通过以下命令来验证WSL版本:
- wsl --set-version Ubuntu-20.04 2
3.1.2 安装Ubuntu子系统
在完成兼容性检查之后,接下来是安装Ubuntu子系统。可以通过以下步骤来完成安装:
- 打开Microsoft Store应用,搜索“Ubuntu 20.04 LTS”并安装。在安装过程中,可以选择一个用户名和密码,这将是Ubuntu子系统环境的登录凭证。
- 安装完成后,打开Ubuntu应用,按照提示完成初始化设置。
- 在Ubuntu子系统中,你可以使用
sudo apt-get update和sudo apt-get upgrade命令来更新系统包和升级系统。
完成这些步骤后,你就拥有了一个基本的Ubuntu环境,接下来可以按照Ubuntu系统下的ROS安装步骤来继续。
3.2 ROS安装流程
3.2.1 安装ROS依赖项
在Ubuntu子系统中安装ROS之前,先确保安装了所有必要的依赖项。以下是一些基本的依赖命令:
- sudo apt-get update
- sudo apt-get install -y python3-rosdep python3-rosinstall-generator python3-wstool python3-rosinstall build-essential
3.2.2 在Ubuntu子系统中安装ROS
在安装依赖项之后,接下来按照常规的ROS安装步骤在Ubuntu子系统中安装ROS:
-
初始化rosdep:
- sudo rosdep init
- rosdep update
-
创建一个新的工作空间目录:
- mkdir -p ~/ros_catkin_ws/src
- cd ~/ros_catkin_ws/
- catkin_make
-
在
~/.bashrc文件中添加以下行来配置环境变量:- source ~/ros_catkin_ws/devel/setup.bash
-
确认ROS环境已经设置:
- echo $ROS_PACKAGE_PATH
3.3 ROS环境配置与测试
3.3.1 环境变量配置
ROS环境变量配置对于ROS运行至关重要,确保ROS可以在不同的终端窗口中被识别和调用。通过在~/.bashrc文件中添加以下行来配置环境变量:
- echo "source ~/ros_catkin_ws/devel/setup.bash" >> ~/.bashrc
- source ~/.bashrc
3.3.2 测试ROS安装
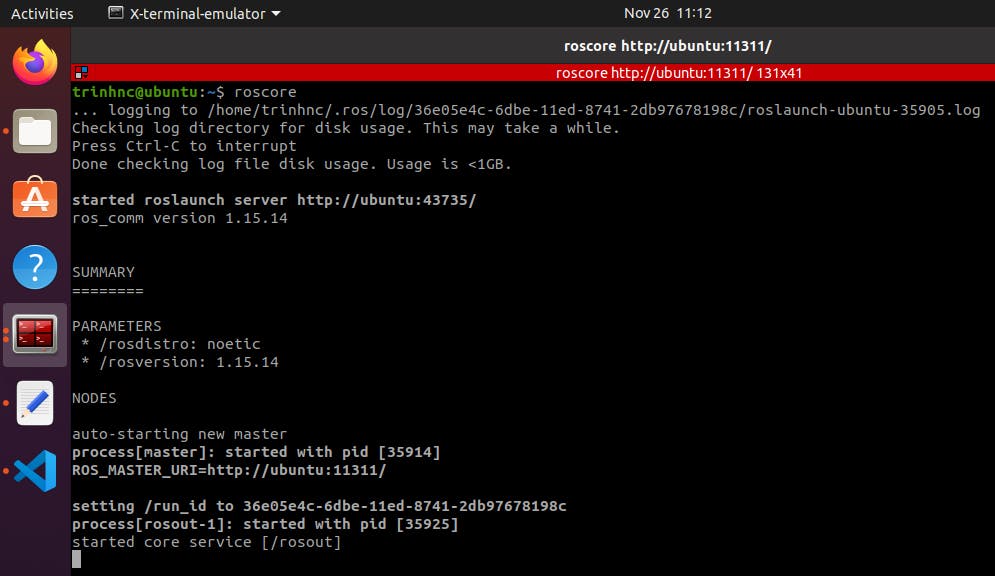
在安装ROS并配置好环境变量后,可以通过运行以下命令来测试ROS是否安装成功:
- roscore
如果看到类似以下输出,表示ROS主节点已经启动成功:

如果遇到任何问题,请检查roscore输出的日志信息,并检查ROS依赖项是否正确安装,以及环境变量是否设置正确。
完成上述步骤后,你已经在Windows系统上的Ubuntu子系统中成功安装了ROS。接下来,可以开始编写ROS节点,运行ROS程序,或者进一步优化你的ROS环境。
4. ROS在macOS系统下的安装策略
随着苹果电脑的普及和性能的提升,macOS成为了众多开发者的首选操作系统。ROS(Robot Operating System)作为机器人开发的首选平台,在macOS上的安装同样可以顺利进行,虽然其依赖于Xcode工具链和某些特定的系统配置。本章节将带领你一步步完成在macOS上的ROS安装、配置,并进行验证。
4.1 macOS系统下的ROS安装准备
在开始安装ROS之前,我们需要准备一些前提条件,确保安装过程顺畅无阻。
4.1.1 安装Homebrew包管理器
macOS系统不同于Linux,没有自带的包管理器,因此安装之前的第一步是获取并安装Homebrew。Homebrew是macOS上的一个包管理器,它会将软件包安装在/usr/local/Cellar目录下,并创建符号链接到/usr/local。
安装Homebrew的步骤如下:
- 打开终端(Terminal)。
- 使用以下命令安装Homebrew:
- /bin/bash -c "$(curl -fsSL https://raw.githubusercontent.com/Homebrew/install/HEAD/install.sh)"
该命令会下载安装脚本并执行,期间可能会询问你输入密码以确认管理员权限。安装完成后,可以执行以下命令来更新Homebrew并安装一些基本工具:
- brew update
- brew upgrade
- brew install git
4.1.2 配置必要的系统依赖
ROS在macOS上的安装需要依赖一些基础工具和库,如Python、pip、OpenCV等。安装这些依赖的步骤如下:
- 安装Python 3(如果尚未安装):
- brew install python3
- 由于某些ROS版本需要特定版本的Python,因此需要安装
pyenv来管理不同的Python版本。
- brew install pyenv
- 安装OpenCV:
- brew install opencv
OpenCV的安装可能需要一段时间,安装完成后,我们已经准备好进行ROS的安装。
4.2 ROS安装与配置步骤
4.2.1 使用Homebrew安装ROS
由于macOS系统没有官方的ROS软件源,我们可以利用Homebrew的仓库来安装ROS。当前,Homebrew已经支持许多ROS版本的安装。例如,安装ROS Noetic版本可以执行以下命令:
- brew install ros-noetic
安装ROS Noetic之前,建议先更新Homebrew:
- brew update
安装完成后,可以使用以下命令检查安装版本:
- roscore --version
4.2.2 配置ROS工作环境
安装完ROS之后,需要配置ROS环境以便使用。这一步骤通常需要将ROS的相关路径添加到环境变量PATH中,以及初始化ROS环境。
- echo "source /opt/homebrew/Cellar/ros-noetic/1.0.0/setup.bash" >> ~/.bash_profile
- source ~/.bash_profile
上述代码中,我们添加了一行脚本到~/.bash_profile文件中,该脚本会在每次打开新的终端会话时被自动执行,以配置ROS环境。
4.3 ROS环境验证与应用
在完成安装和配置之后,我们可以通过执行一些基本的ROS命令来验证安装是否成功。
4.3.1 环境变量检查
首先,检查ROS环境变量是否设置正确:
- echo $ROS_PACKAGE_PATH
输出结果应该类似于:/opt/homebrew/Cellar/ros-noetic/1.0.0/share,表明环境变量设置成功。
4.3.2 简单ROS应用测试
我们可以运行一个简单的ROS节点来测试ROS是否能够正常工作。使用以下命令启动roscore:
- roscore
然后在新的终端窗口中运行一个简单的ROS节点,例如 turtlesim:
- rosrun turtlesim turtlesim_node
如果可以看到一个窗口弹出,显示一只小海龟在屏幕上随机移动,那么恭喜你,ROS已经在你的macOS系统上成功安装并运行了!
通过上述章节的介绍,我们可以看到,即使在macOS这样的非标准Linux环境下,通过适当的配置和调整,安装ROS也是完全可行的。至此,你已经迈出了成为ROS开发者的第一步。
5. ROS环境高级优化与配置技巧
5.1 系统性能优化
随着ROS(Robot Operating System)应用程序的复杂性增加,系统的性能优化变得尤为重要。优化能够提高机器人的响应速度,延长工作时间,特别是在资源受限的嵌入式系统中。
5.1.1 ROS性能测试工具
ROS的性能测试工具很多,如rostopic hz可以测量某个话题的发布频率,rosnode info可以查看节点信息和话题统计,还有rqt_plot用于绘制数据流图表等。为了进行更系统的性能测试,可以使用rosbench工具,它可以帮助开发者测试系统的消息发布和订阅性能,测量延迟和吞吐量。此外,rosbag工具可以记录和回放ROS话题数据,用于离线分析。
- # 测量话题的发布频率
- rostopic hz /topic_name
- # 查看节点信息
- rosnode info /node_name
- # 使用rqt_plot绘制数据流图表
- rosrun rqt_plot rqt_plot
- # 使用rosbench进行性能测试
- rosrun rosbench rosbench -topic /topic_name
5.1.2 性能瓶颈分析与优化策略
在进行性能测试后,可能需要进一步的瓶颈分析和优化。通常情况下,可以优化以下几个方面:
- 资源使用:确保CPU和内存使用得当,使用
top或htop命令监控系统资源使用情况。 - 通信效率:减少不必要的通信或使用更高效的通信协议(如UDP代替TCP)。
- 多线程处理:适当使用多线程来分散计算负载。
- 节点优化:针对特定节点的代码进行性能优化,例如减少计算量或使用更高效的数据结构。
5.2 ROS节点管理和调试
为了有效地管理ROS节点和进行调试,需要了解一些管理工具和方法。
5.2.1 ROS节点监控工具
节点监控工具对于检查ROS系统的健康状态至关重要。rosnode命令提供了节点的列表、详细信息以及与节点相关的话题信息。除此之外,rqt_graph生成一个动态的图形化表示,清晰地展示节点间的关系和话题流。
- # 列出所有活跃节点
- rosnode list
- # 获取节点信息
- rosnode info /node_name
- # 使用rqt_graph查看节点关系图
- rosrun rqt_graph rqt_graph
5.2.2 调试和故障排除方法
调试过程中,可以使用roslaunch命令的--screen选项来查看节点启动时的输出信息,这有助于快速定位问题。rosrun和rosnode提供了kill和ping命令,可以用于杀死进程和检查节点的可达性。
此外,使用gdb或valgrind可以进行更深入的调试。对于可视化调试,rviz工具可以直观地查看机器人状态信息和传感器数据。
- # 启动节点并附加屏幕输出
- roslaunch package_name file_name.launch --screen
- # 使用gdb进行调试
- gdb --args rosrun package_name executable_name
- # 使用rviz查看数据可视化
- rosrun rviz rviz -d /path/to/config.rviz
5.3 ROS环境的定制与安全
为了确保ROS环境的稳定性和安全性,进行环境的定制和安全措施是非常重要的。
5.3.1 自定义ROS安装包
自定义ROS安装包能够满足特定需求,例如添加额外的依赖项或修改系统设置。可以通过rosbuild系统或catkin工具链来创建和分发这些自定义包。
5.3.2 确保ROS系统的安全性和稳定性
安全性方面,应当保证ROS系统的软件升级和补丁更新,使用rosdep检查和安装依赖项。稳定性方面,可以采取冗余设计,为关键系统组件提供备份,以及实施故障转移机制。
- # 使用rosdep检查和安装依赖项
- sudo apt-get update
- rosdep check --from-paths src --ignore-src -r -y
- # 使用catkin创建ROS工作空间和包
- catkin_init_workspace
- catkin_create_pkg my_package std_msgs rospy roscpp
通过这些高级优化和配置技巧,可以大幅提升ROS环境的性能、稳定性和安全性,为开发复杂的机器人应用程序奠定基础。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
相关推荐

专栏目录

文章持续更新中,敬请期待~
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
戴尔笔记本BIOS语言设置:多语言界面和文档支持全面了解
【T-Box能源管理】:智能化节电解决方案详解
【VCS高可用案例篇】:深入剖析VCS高可用案例,提炼核心实施要点
ISO_IEC 27000-2018标准实施准备:风险评估与策略规划的综合指南
Cygwin系统监控指南:性能监控与资源管理的7大要点
【内存分配调试术】:使用malloc钩子追踪与解决内存问题
【精准测试】:确保分层数据流图准确性的完整测试方法
Fluentd与日志驱动开发的协同效应:提升开发效率与系统监控的魔法配方
【Arcmap空间参考系统】:掌握SHP文件坐标转换与地理纠正的完整策略


专栏目录
文章持续更新中,敬请期待~
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )





















