CANoe 仿真与 SOME_IP 协议:故障诊断与排除技巧,快速定位问题根源
发布时间: 2024-12-22 06:47:45 阅读量: 9 订阅数: 12 

基于 SOMEIP 协议的 CANoe 软件仿真

# 摘要
随着汽车电子系统日益复杂化,SOME/IP协议作为车载网络通信的关键技术,其故障诊断的准确性和效率对于确保汽车软件的可靠性至关重要。本文全面介绍了CANoe仿真工具及其在SOME/IP故障诊断中的应用。文章首先概述了CANoe的基本功能与界面配置,然后深入探讨了如何利用CANoe捕获、分析SOME/IP数据流,并进行模拟通信与故障注入。同时,本文提供了故障排除技巧,包括诊断方法、日志记录和追踪技巧,并通过案例分析展示了如何应用CANoe来定位和解决SOME/IP问题。最后,本文探讨了提高诊断效率的高级技巧,包括脚本化测试、第三方工具集成以及团队知识共享,以促进汽车电子行业的持续改进和发展。
# 关键字
CANoe仿真工具;SOME/IP协议;故障诊断;数据流分析;模拟通信;自动化测试
参考资源链接:[SOMEIP协议下的CANoe软件仿真:面向服务的车载网络架构](https://wenku.csdn.net/doc/333m8rwn89?spm=1055.2635.3001.10343)
# 1. CANoe仿真工具概述
CANoe是由Vector公司开发的一款功能强大的网络仿真和测试工具,它广泛用于汽车电子和嵌入式系统的开发、测试和故障诊断。CANoe能够模拟各种ECU(电子控制单元)以及网络中的其他设备,使得开发者能够在实际硬件部署之前对整个系统进行测试。在CANoe中,用户可以通过软件界面对网络流量进行实时监控、分析和调试。它支持多种车载总线协议,包括CAN、LIN、FlexRay等,并且可以扩展支持新兴的标准,比如本文将详细介绍的SOME/IP协议。
CANoe的核心组件之一是图形化界面,提供了可视化的操作流程和配置选项,使得用户可以轻松创建和管理项目。此外,CANoe还内置了强大的脚本功能,支持自动化测试流程,这在持续集成和大型项目开发中尤为重要。本章我们将介绍CANoe的基本功能和界面,为进一步深入理解其在SOME/IP协议中的应用打下坚实的基础。
# 2. CANoe在SOME/IP故障诊断中的应用
## 3.1 CANoe软件界面和配置
### 3.1.1 主界面布局和工具栏功能
CANoe是Vector公司开发的一款强大的网络和ECU开发测试软件,它广泛应用于汽车电子领域。用户通过CANoe可以模拟、测试和分析汽车网络通信。CANoe的主界面布局清晰,主要包括菜单栏、工具栏、多个窗口区域等部分。工具栏提供快速访问常用功能的快捷方式,例如启动和停止测量、保存数据、配置网络参数等。
为了更深入的了解CANoe,我们需要首先熟悉其界面布局和工具栏功能:
1. **菜单栏**: 包含了几乎所有的软件操作选项。从文件管理到视图配置,再到各种高级工具和分析功能,都可以在菜单栏找到。
2. **工具栏**: 位于菜单栏下方,快速提供常用操作的图标按钮。例如,“开始测量”、“停止测量”、“保存”等。
3. **布局管理**: 通过“布局”按钮,用户可以根据自己的习惯和需要调整窗口区域的布局。
4. **测量窗口**: 用于显示捕获的数据,支持多种数据显示方式,如表格、图形、二进制等。
5. **追踪窗口**: 提供对捕获的数据的追踪功能,便于调试和分析问题。
### 3.1.2 网络配置和车辆通信设置
为了使CANoe能正确地捕获和发送SOME/IP协议消息,需要对网络配置进行详细设置。这一过程包括定义网络接口、设置网络参数、配置ECU节点等。通常,这些操作在软件的“网络配置”和“车辆通信设置”中完成。
- **网络接口配置**:
在CANoe的“网络”菜单中,选择“配置”选项进入网络配置界面。这里需要选择正确的网络接口卡,并配置相应的网络参数,如波特率、通信协议等。
- **车辆通信设置**:
车辆通信设置是指定义车辆通信网络中的各个ECU节点及其地址。这一步骤对于理解SOME/IP协议在特定车辆网络中的工作模式至关重要。
通过“车辆”菜单中的“配置”选项,用户可以打开车辆通信设置窗口,在此可以创建、修改或删除网络中的ECU节点,并为它们分配物理地址和应用程序地址。
- **协议栈初始化**:
在进行上述设置之后,需要初始化SOME/IP协议栈,以保证通信的正常进行。这通常涉及到设置SOME/IP服务和端口,确保服务的正确注册和调用。
- **仿真和诊断配置**:
在需要进行仿真或者故障注入时,还需要配置相关的仿真节点和诊断服务。这一步骤可以借助CANoe中的“诊断”菜单和“仿真”菜单来实现。
## 3.2 使用CANoe捕获和分析SOME/IP数据流
### 3.2.1 数据包捕获技术
数据捕获是故障诊断中的重要步骤,通过捕获网络上的数据包,我们可以观察到实际的通信情况。在CANoe中,数据包捕获涉及以下几个关键点:
- **捕获设置**:
首先需要配置捕获过滤条件,根据需要设置哪些数据包需要被捕获。例如,可以设置仅捕获特定ID的数据包,或者特定类型的数据包(如SOME/IP请求、响应等)。
```mermaid
graph TD
A[开始捕获] --> B[定义过滤条件]
B --> C[设置捕获参数]
C --> D[启动捕获]
D --> E[捕获数据]
E --> F[停止捕获]
```
- **捕获过程**:
在设置好过滤条件后,启动数据包捕获。一旦网络上有符合条件的数据包发送,CANoe就会捕获这些数据,并在测量窗口中显示。
- **数据存储**:
捕获的数据可以保存为文件,以便后续分析。在CANoe中,可以使用“文件”菜单中的“保存”选项,选择保存类型和路径进行保存。
### 3.2.2 数据过滤和解码技巧
数据过滤是提高分析效率的重要手段,特别是在网络数据流很大时。在CANoe中,数据过滤和解码功能非常强大,用户可以根据特定的需求过滤数据,并对数据进行解码。
- **数据过滤**:
可以使用“过滤”功能来设置过滤条件,仅显示那些符合条件的数据包。例如,如果只关心SOME/IP请求类型的消息,就可以设置过滤条件来仅显示这些消息。
- **数据解码**:
CANoe提供了强大的数据解码功能,可以将原始数据包解析为易理解的文本格式。这不仅涉及到SOME/IP协议自身的消息结构,还可能涉及TCP/IP或UDP/IP层次的数据封装。
```c
// 示例代码:展示一个简单的数据包解码过程
void decodeSOMEIPMessage(const byte* data, size_t size) {
// 检查数据包长度是否合理
if(size < SOMEIP_HEADER_SIZE) {
printf("Invalid SOME/IP message length.\n");
return;
}
// 解析消息头部信息
SOMEIPHeader* header = (SOMEIPHeader*)data;
printf("Service ID: %d, Method ID: %d, Client ID: %d\n",
be32toh(header->service_id), be32toh(header->method_id), be32toh(header->client_id));
// 根据消息类型进一步解析
switch(header->message_type) {
case SOMEIP_REQUEST:
// 解析请求消息...
break;
case SOMEIP_RESPONSE:
// 解析响应消息...
break;
default:
// 其他类型消息...
break;
}
}
```
- **高级解码应用**:
针对一些复杂的场景,CANoe还提供了高级解码器(CANoe decoder),允许用户通过图形化的界面定义解码逻辑,并可以将这些解码逻辑应用于特定的数据流。
## 3.3 模拟SOME/IP通信和故障注入
### 3.3.1 创建模拟场景
为了在没有真实物理网络设备的条件下进行故障诊断和测试,CANoe提供了一系列模拟SOME/IP通信的能力。创建模拟场景包括定义模拟节点、模拟消息以及消息的发送和接收逻辑。
1. **定义模拟节点**:
在CANoe中,可以通过“网络”菜单下的“节点”功能来添加模拟节点。对于每个模拟节点,可以设置其行为和属性,模拟真实网络中的ECU。
2. **配置模拟消息**:
模拟消息的配置需要用户明确消息的类型、大小、发送间隔等参数。对于SOME/IP协议,还需要配置服务ID、方法ID、客户

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 SOMEIP 协议在 CANoe 软件仿真中的应用,为进阶实践者提供了全面指南。通过一系列文章,专栏解析了 SOMEIP 协议的关键概念,包括服务发现、消息处理、事件通信、负载优化、故障诊断、服务注册和订阅,以及 QoS 策略。此外,还介绍了面向服务架构的 SOMEIP 与 CANoe 仿真环境的搭建,以及 SOMEIP 协议在车载网络中的作用。通过深入的分析和实际案例,专栏帮助读者掌握 CANoe 软件仿真与验证的技巧,从而优化 SOMEIP 通信,提升车载网络性能,实现更智能、更可靠的车辆通讯。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【材料选择专家指南】:如何用最低成本升级漫步者R1000TC北美版音箱
# 摘要
本文旨在深入探讨漫步者R1000TC北美版音箱的升级理论与实践操作指南。首先分析了音箱升级的重要性、音质构成要素,以及如何评估升级对音质的影响。接着介绍了音箱组件工作原理,特别是扬声器单元和分频器的作用及其选择原则。第三章着重于实践操作,提供扬声器单元、分频器和线材的升级步骤与技巧。第四章讨论了升级效果的评估方法,包括使用音频测试软件和主观听感分析。最后,第五章探讨了进阶升级方案,如音频接口和蓝牙模块的扩展,以及个性化定制声音风格的策略。通过本文,读者可以全面了解音箱升级的理论基础、操作技巧以及如何实现个性化的声音定制。
# 关键字
音箱升级;音质提升;扬声器单元;分频器;调音技巧
【PyQt5控件进阶】:日期选择器、列表框和文本编辑器深入使用
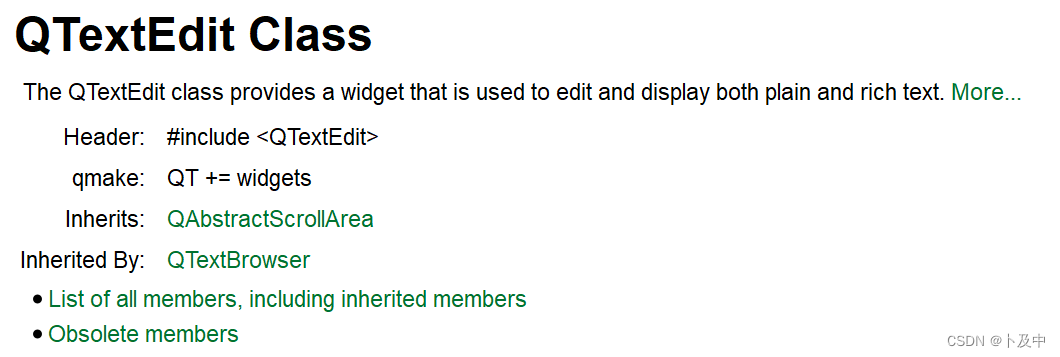
# 摘要
PyQt5是一个功能强大的跨平台GUI框架,它提供了丰富的控件用于构建复杂的应用程序。本文从PyQt5的基础回顾和控件概述开始,逐步深入探讨了日期选择器、列表框和文本编辑器等控件的高级应用和技巧。通过对控件属性、方法和信号与槽机制的详细分析,结合具体的实践项目,本文展示了如何实现复杂日期逻辑、动态列表数据管理和高级文本编辑功能。此外,本文还探讨了控件的高级布局和样式设计
MAXHUB后台管理新手速成:界面概览至高级功能,全方位操作教程

# 摘要
MAXHUB后台管理平台作为企业级管理解决方案,为用户提供了一个集成的环境,涵盖了用户界面布局、操作概览、核心管理功能、数据分析与报告,以及高级功能的深度应用。本论文详细介绍了平台的登录、账号管理、系统界面布局和常用工具。进一步探讨了用户与权限管理、内容管理与发布、设备管理与监控的核心功能,以及如何通过数据分析和报告制作提供决策支持。最后,论述了平台的高
深入解析MapSource地图数据管理:存储与检索优化之法
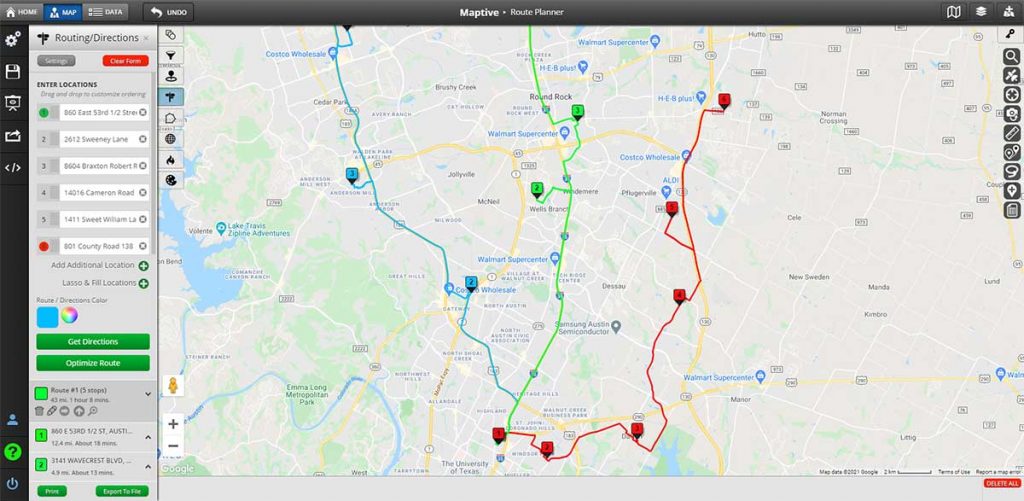
# 摘要
本文对MapSource地图数据管理系统进行了全面的分析与探讨,涵盖了数据存储机制、高效检索技术、数据压缩与缓存策略,以及系统架构设计和安全性考量。通过对地图数据存储原理、格式解析、存储介质选择以及检索算法的比较和优化,本文揭示了提升地图数据管理效率和检索性能的关键技术。同时,文章深入探讨了地图数据压缩与缓存对系统性能的正面影响,以及系统架构在确保数据一致性
【结果与讨论的正确打开方式】:展示发现并分析意义
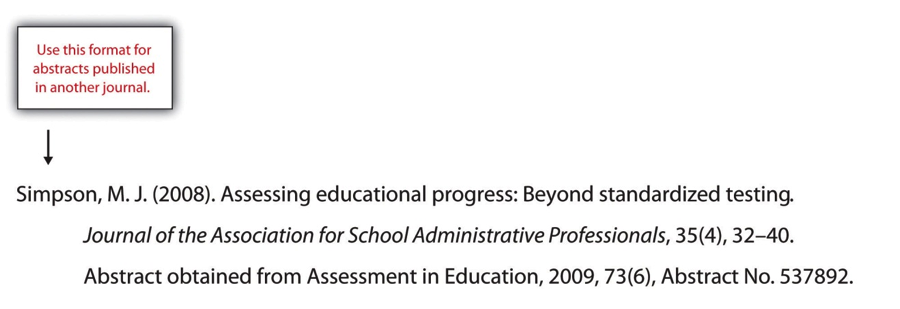
# 摘要
本文深入探讨了撰写研究论文时结果与讨论的重要性,分析了不同结果呈现技巧对于理解数据和传达研究发现的作用。通过对结果的可视化表达、比较分析以及逻辑结构的组织,本文强调了清晰呈现数据和结论的方法。在讨论部分,提出了如何有效地将讨论与结果相结合、如何拓宽讨论的深度与广度以及如何提炼创新点。文章还对分析方法的科学性、结果分析的深入挖掘以及案例分析的启示进行了评价和解读。最后
药店管理系统全攻略:UML设计到实现的秘籍(含15个实用案例分析)
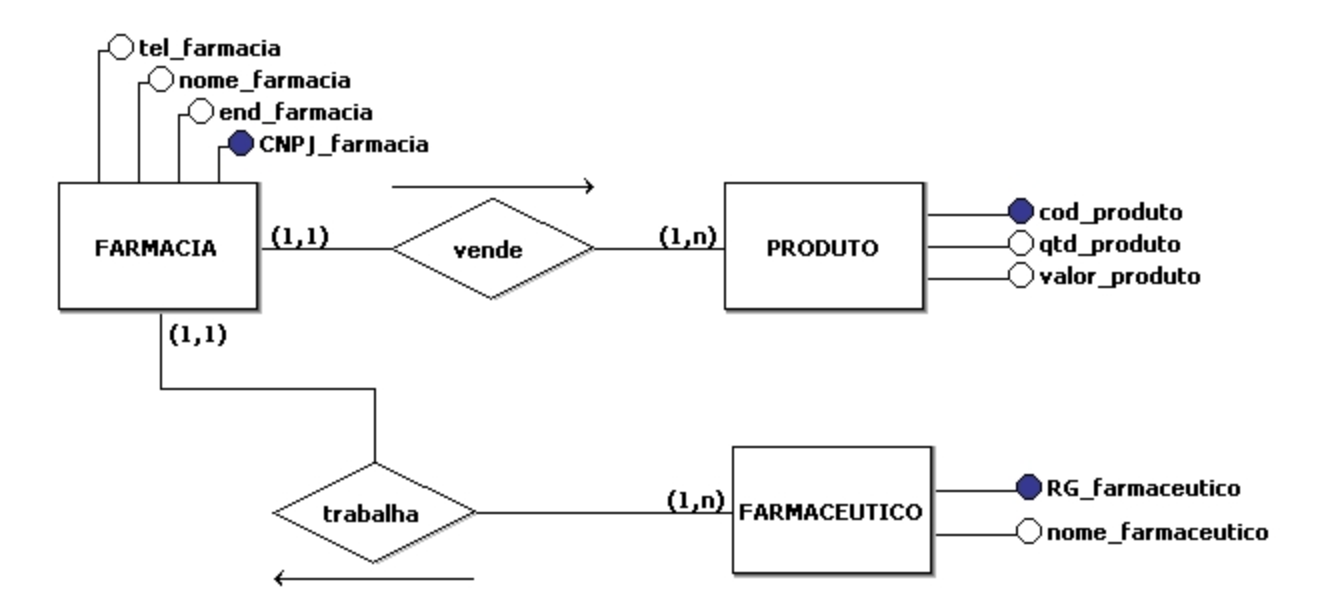
# 摘要
本论文首先概述了药店管理系统的基本结构和功能,接着介绍了UML理论在系统设计中的应用,详细阐述了用例图、类图的设计原则与实践。文章第三章转向系统的开发与实现,涉及开发环境选择、数据库设计、核心功能编码以及系统集成与测试。第四章通过实践案例深入探讨了UML在药店管理系统中的应用,包括序列图、活动图、状态图及组件图的绘制和案例分析。最后,论文对药店管理系统的优化与维护进行了讨论,提
【555定时器全解析】:掌握方波发生器搭建的五大秘籍与实战技巧
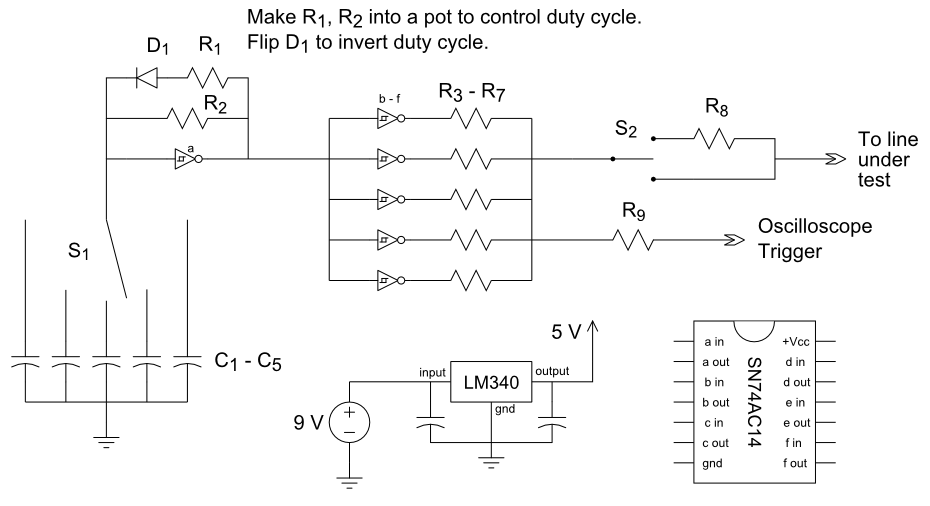
# 摘要
本文详细介绍了555定时器的工作原理、关键参数、电路搭建基础及其在方波发生器、实战应用案例以及高级应用中的具体运用。首先,概述了555定时器的基本功能和工作模式,然后深入探讨了其在方波发生器设计中的应用,包括频率和占空比的控制,以及实际实验技巧。接着,通过多个实战案例,如简易报警器和脉冲发生器的制作,展示了555定时器在日常项目中的多样化运用。最后,分析了555定时器的多用途扩展应用,探讨了其替代技术,
【Allegro Gerber导出深度优化技巧】:提升设计效率与质量的秘诀

# 摘要
本文全面介绍了Allegro Gerber导出技术,阐述了Gerber格式的基础理论,如其历史演化、
Profinet通讯优化:7大策略快速提升1500编码器响应速度
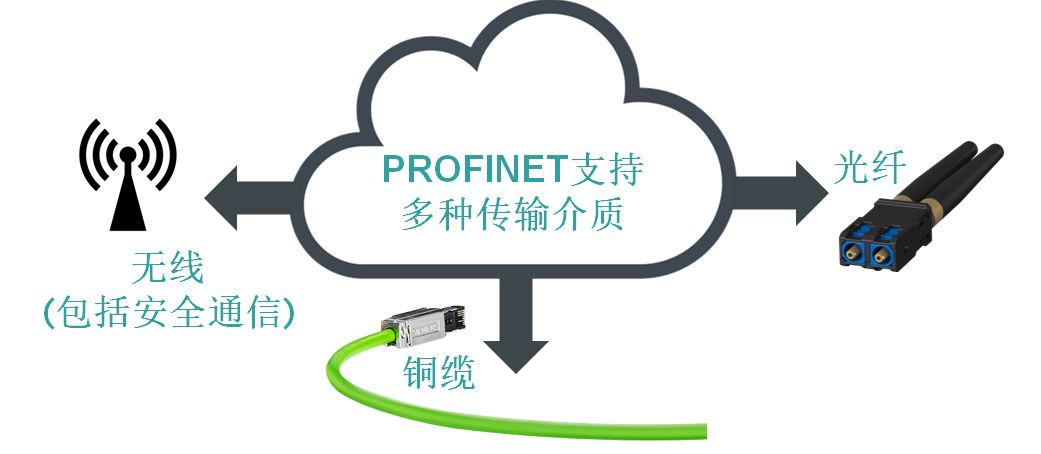
# 摘要
Profinet作为一种工业以太网通讯技术,其通讯性能和编码器的响应速度对工业自动化系统至关重要。本文首先概述了Profinet通讯与编码器响应速度的基础知识,随后深入分析了影响Profinet通讯性能的关键因素,包括网络结构、数据交换模式及编码器配置。通过优化网络和编码器配置,本文提出了一系列提升Profinet通讯性能的实践策略。进一步,本文探讨了利用实时性能监控、网络通讯协议优化以及预
【时间戳转换秘籍】:将S5Time转换为整数的高效算法与陷阱分析
# 摘要
时间戳转换在计算机科学与信息技术领域扮演着重要角色,它涉及到日志分析、系统监控以及跨系统时间同步等多个方面。本文首先介绍了时间戳转换的基本概念和重要性,随后深入探讨了S5Time与整数时间戳的理论基础,包括它们的格式解析、定义以及时间单位对转换算法的影响。本文重点分
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )