【Zynq-7000 SoC外设接口攻略】:高速通信接口配置与调试不求人
发布时间: 2024-12-15 08:43:52 阅读量: 3 订阅数: 3 

Xilinx Zynq-7000 SoC芯片资料技术手册资料设计指导合集.zip

参考资源链接:[ug585-Zynq-7000-TRM.pdf](https://wenku.csdn.net/doc/6401acf3cce7214c316edbe7?spm=1055.2635.3001.10343)
# 1. Zynq-7000 SoC外设接口概览
## 1.1 Zynq-7000 SoC概述
Zynq-7000系列SoC是Xilinx公司推出的集成了ARM处理器和FPGA逻辑资源的单芯片系统。这种独特的架构将处理器系统与可编程硬件逻辑紧密结合起来,提供了灵活且高效的解决方案,适合于多种高性能计算和实时应用。本章节将对Zynq-7000 SoC的外设接口进行初步的概述,为后续深入理解其硬件接口、配置方法和软件开发提供一个整体框架。
## 1.2 外设接口的重要性
对于任何SoC而言,外设接口是连接内部资源和外部世界的关键通道。Zynq-7000 SoC也不例外,它提供了多种丰富的外设接口,包括但不限于GPIO、内存接口、高速串行接口等。理解这些接口的基本特性及它们如何协同工作,对于设计高效的系统架构以及开发高性能应用至关重要。
## 1.3 接口类型和应用场景
Zynq-7000 SoC支持的外设接口类型多样,应用场景覆盖广泛,从简单的GPIO控制到高速数据通信,再到复杂的应用处理如视频和网络数据流。本章将简要介绍这些接口,为后续章节中对具体接口的深入讲解和实战配置打下基础。通过本章的学习,读者应能对Zynq-7000 SoC的外设接口有一个宏观的认识,并期待在后续章节中获得更加深入的技术细节。
# 2. Zynq-7000 SoC硬件接口详解
## 2.1 Zynq-7000 SoC的基础架构
### 2.1.1 双核ARM Cortex-A9处理器
Zynq-7000系列SoC集成的双核ARM Cortex-A9处理器是基于ARMv7指令集架构,能够提供强大的计算性能,使得设备能够处理复杂的多任务操作。每个核心均配备了私有的L1缓存,并共享统一的L2缓存,通过高级微控制器总线架构(AMBA)高速互联,能够实现高达1GHz的频率运行。这种处理器核心还包含各种硬件加速器,如NEON技术,为图像处理、数字信号处理(DSP)等应用提供了硬件级别的支持。
在系统设计中,ARM核心通常负责运行操作系统、运行应用软件和控制片上可编程逻辑(PL)。开发者可以利用这种双核处理器的优势,在两个核心之间分配不同的任务负载,以实现系统性能的最优和资源的有效利用。开发环境可以通过Xilinx提供的工具链进行程序的编写、编译以及调试,例如利用DS-5工具集,它为ARM处理器提供了丰富的调试和分析工具,以帮助开发者更高效地开发和优化应用。
### 2.1.2 可编程逻辑单元(PL)
可编程逻辑单元(PL)部分基于Xilinx的7系列FPGA技术,提供了灵活的硬件逻辑和互连资源,可以用来实现自定义硬件加速器、接口和其他逻辑功能。PL由大量的可配置逻辑块(CLB)、可配置I/O单元和专用的存储资源组成,它允许开发者以硬件描述语言(HDL)编写代码,然后通过FPGA的编译器(如Vivado)将其编译成可下载到PL中的配置位流。
PL的一个重要特点是它的灵活性和高性能,这使得Zynq-7000 SoC能够满足实时和高性能计算需求。例如,PL可以用来实现图像和视频处理算法、硬件加速的网络协议栈以及自定义的接口控制器等。在实际项目中,开发者经常需要根据应用需求对PL进行重新编程和优化,以实现最高的性能和资源利用率。
在对PL部分进行编程时,常用的HDL语言有VHDL和Verilog。开发者在编写代码后,通过Vivado设计套件中的综合工具进行逻辑合成,之后通过布局布线(place and route)生成配置文件,并下载到PL中实现所需功能。PL的设计和优化需要开发者具备扎实的数字逻辑设计基础和对FPGA架构的理解。
## 2.2 主要外设接口特性
### 2.2.1 GPIO接口的基本操作
通用输入输出(GPIO)是连接处理器与外部世界的基本接口之一。在Zynq-7000 SoC中,GPIO接口是通过可编程逻辑(PL)部分实现的。通过GPIO,开发者可以实现对按钮、LED灯、传感器等外部设备的控制和读取。GPIO可以被配置为输入或输出模式,并且支持中断功能,使得在检测到外部事件时能够及时通知处理器。
在具体实现中,开发者需要使用Vivado来配置GPIO引脚的功能,例如,通过Vivado的图形化界面或者编辑XDC(Xilinx Design Constraints)文件来指定特定的PL引脚作为GPIO。一旦配置完成,开发者可以在ARM核心的软件层面,通过读写寄存器来控制GPIO的行为。
接下来是一个简单的示例,展示如何在Zynq-7000 SoC中使用C语言配置和操作GPIO接口:
```c
#include "xgpiops.h"
#include "xparameters.h"
// 假设我们使用的是Zynq的第0个GPIO设备,且引脚编号为3
#define GPIO_DEVICE_ID 0
#define GPIO_PIN_NUM 3
// 初始化GPIO设备
void GpioInit() {
XGpioPs gpio;
XGpioPs_Config *configPtr;
configPtr = XGpioPs_LookupConfig(GPIO_DEVICE_ID);
XGpioPs_CfgInitialize(&gpio, configPtr, configPtr->BaseAddr);
// 设置引脚为输出模式
XGpioPs_SetDirectionPin(&gpio, GPIO_PIN_NUM, 1);
}
// 设置GPIO引脚的输出状态为高
void GpioSetHigh() {
XGpioPs_WritePin(&gpio, GPIO_PIN_NUM, 1);
}
// 设置GPIO引脚的输出状态为低
void GpioSetLow() {
XGpioPs_WritePin(&gpio, GPIO_PIN_NUM, 0);
}
int main() {
GpioInit();
GpioSetHigh(); // 将引脚设置为高电平
GpioSetLow(); // 将引脚设置为低电平
return 0;
}
```
在上述代码中,首先进行了GPIO设备的初始化,然后设置了特定引脚为输出模式,并通过两个函数`GpioSetHigh`和`GpioSetLow`分别将引脚的输出设置为高电平和低电平。实际应用中,GPIO可以用来控制LED灯的亮灭,或者读取按钮的状态等。
### 2.2.2 DDR内存接口的技术细节
在Zynq-7000 SoC中,ARM处理器核心通过内存接口控制器(MIC)与外部DDR内存进行通信。该内存接口不仅支持DDR3 SDRAM,还支持DDR2 SDRAM,以及移动DDR2 (LPDDR2) 等不同类型的内存。通过DDR接口,处理器可以访问大量的内存资源,以满足对存储空间和速度的需求。
DDR内存接口的设计涉及多个参数配置,包括数据宽度、时钟频率、时序参数等。为了有效地利用这些参数,开发者需要参考Zynq-7000的数据手册来配置DDR控制器。在Vivado设计套件中,DDR接口的配置通过“MIG(Memory Interface Generator)”来进行。MIG会生成一个可以集成到Zynq PL部分的IP核,这个核能够处理与DDR相关的所有底层通信。
DDR接口的配置和优化对于系统性能有着直接的影响。如果配置不当,可能会导致内存访问延迟增加,甚至引发数据错误。因此,开发者需要仔细计算时序参数,并通过仿真和实际测试来验证配置的正确性。
下面是一个简化的DDR内存配置流程示例:
1. 启动Vivado设计套件。
2. 在IP Catalog中选择“Memory & Storage Elements”分类,然后选择“Memory Interface Generator”。
3. 进行DDR接口的参数设置,包括选择内存类型、配置时钟频率、时序参数等。
4. 使用MIG的图形界面或者编辑IP核的约束文件来完成DDR接口的配置。
5. 将生成的DDR IP核集成到设计中,并连接到ARM处理器核心。
6. 进行综合、实现和生成比特流文件。
7. 最后,下载配置到PL中,并进行实际测试验证DDR接口的功能和性能。
下表是DDR内存接口常见的配置参数:
| 参数名称 | 参数说明 |
| -------------- | --------------------------- |
| Memory Type | DDR3, DDR2, LPDDR2 |
| Data Width | 8, 16, 32位 |
| Clock Frequency| 最大支持频率

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【全面解析】:Tc3卸载全过程的权威指南,一步到位彻底清除
参考资源链接:[TwinCAT 3软件卸载完全指南](https://wenku.csdn.net/doc/1qen88ydgt?spm=1055.2635.3001.10343)
# 1. Tc3卸载的必要性和准备工作
## 1.1 Tc3卸载的必要性
Tc3(假设的软件名称)是一款广泛应用于IT行业中的工具软件,它在优化系统性能、增强系统安全性方面具有一定的作用。然而,随着时间的推
MAC地址申请全攻略:步骤、误区和全球分配机构解析

参考资源链接:[IEEE下的MAC地址申请与费用详解](https://wenku.csdn.net/doc/646764ec5928463033d8ada0?spm=1055.2635.3001.10343)
# 1. MAC地址概述及其重要性
MAC地址,即媒体访问控制地址,是网络设备在局域网中用于唯一标识的地址。它由48位二进制数字构成,通常以十六进制数的形式表示
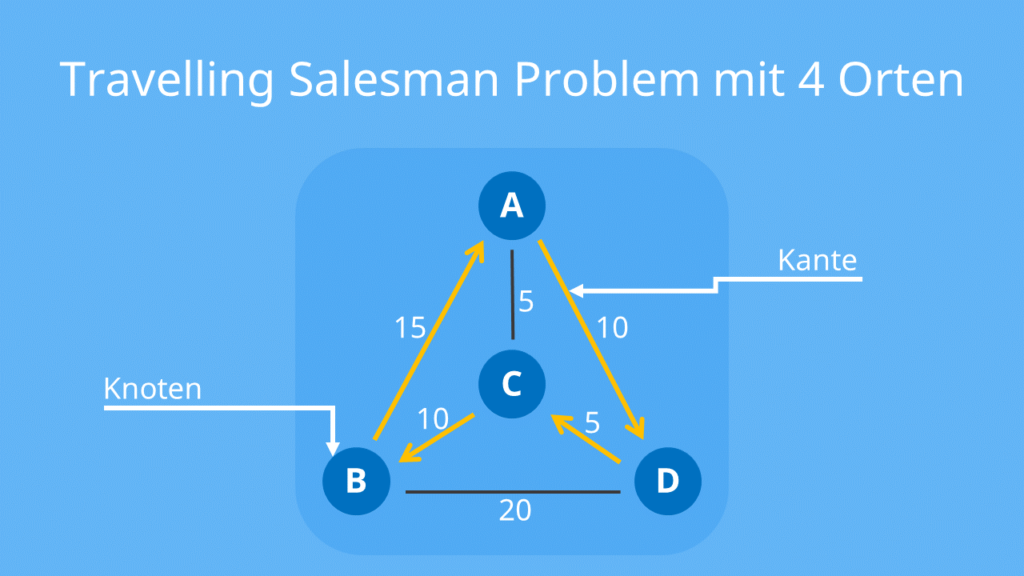
【图论与组合之美】:如何在复杂网络中运用组合数学(IT精英专属)
参考资源链接:[组合理论及其应用 李凡长 课后习题 答案](https://wenku.csdn.net/doc/646b0b685928463033e5bca7?spm=1055.2635.3001.10343)
# 1. 图论与组合数学基础
图论和组合数学是研究离散结构的数学分
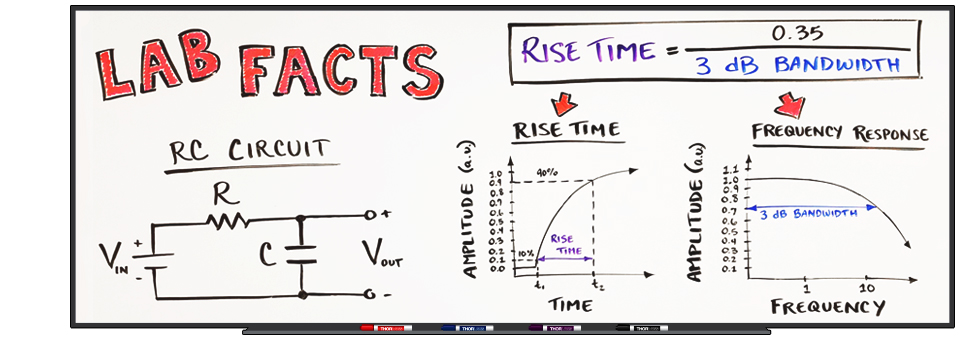
【电路频率响应的终极指南】:掌握原理、特性、测试方法,提升电路设计效率
参考资源链接:[大电容LDO中的Miller补偿:误区与深度解析](https://wenku.csdn.net/doc/1t74pjtw6m?spm=1055.2635.3001.10343)
# 1. 电路频率响应概述
电路频率响应是电子电路设计中的一个重要方面,它描述了电路对不同频率信号的响应能力。理解频率响应不仅对于优化电路性能至关重要,也对于信号处理、滤波
PL_0编译程序:语法分析到代码生成的高效技术研究

参考资源链接:[PL/0编译程序研究与改进:深入理解编译原理和技术](https://wenku.csdn.net/doc/20is1b3xn1?spm=1055.2635.3001.10343)
# 1. PL_0编译程序概述
## 1.1 编译程序的定义和功能
编译程序,通常被称为
电路设计必修课:AE-2M-3043 GC2053 CSP引脚布局与关键应用

参考资源链接:[GC2053 CSP图像传感器 datasheet V1.2:AE-2M-3043 最新版](https://wenku.csdn.net/doc/5dmsy2n5n3?spm=1055.2635.3001.10343)
# 1. AE-2M-3043 GC2053 CSP引脚布局概述
## 简介
AE-2M-3043 GC2053 CSP(Chip-Scal
Verilog编码器故障排除宝典:立即修复常见问题的紧急指南

参考资源链接:[8-13编码器 verilog 实现 包含仿真图](https://wenku.csdn.net/doc/6412b78bbe7f
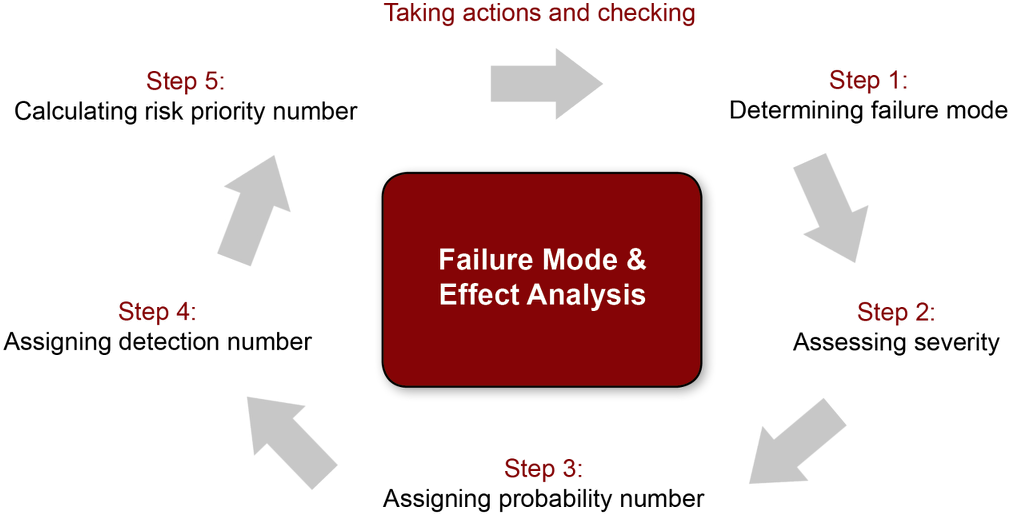
【统计学与质量】:CP、CPK、PP、PPK、CMK全攻略,数据驱动质量管理
参考资源链接:[CP、CPK、PP、PPK、CMK的计算公式过程能力指数公式](https://wenku.csdn.net/doc/6412b710be7fbd1778d48f44?spm=1055.2635.3001.10343)
# 1. 统计学在质量管理中的应用基础
## 统计学与质量管理
统计学在质量管理中的应用是现代制造业和服务业中不可忽视的环节。统计学通过数
兄弟 DCP9020CDN 双面打印功能:提升工作效率的5大技巧
参考资源链接:[兄弟DCP9020CDN等系列彩色激光多功能设备维修手册指南](https://wenku.csdn.net/doc/644b8ce2ea0840391e559a94?spm=1055.2635.3001.10343)
# 1. 双面打印技术概述
## 1.1 双面打印技术的基本原理
双面打印技术,也称为自动双面打印,是一种能够在打印过程中自动翻转纸张,从而在纸张的两面都进行打印的先进技术。这种技术可以有效减少纸张的使用,从而降低打印成本并提高工作效率。
## 1.2 双面打印技术的优势
双面打印技术的最大优势在于节约纸张。据统计,双面打印可以节省约40%的纸张,这对于企业
RV-C文档编写艺术:掌握编写与修订的最佳实践

参考资源链接:[北美房车通讯协议RV-C:CAN2.0应用详解](https://wenku.csdn.net/doc/70dzrx8o2e?spm=1055.2635.3001.10343)
# 1. RV-C文档编写艺术概览
编写技术文档是IT行业中的一项基础且至关重要的技能,而RV-C文档作为一种技术沟通的媒介,其编写艺术值得深入探讨。RV-C文档是指在特定行业或领域中,根据RV-C标准进行编写的各类技术文档。在探讨RV-C文档编写艺术的过程中
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )