【计算机视觉与Python VR】:打造视觉领先的应用
发布时间: 2024-12-07 17:35:24 阅读量: 16 订阅数: 22 

基于Python实现多视角立体重建及其应用场景探讨

# 1. 计算机视觉与Python VR的基本概念
计算机视觉与虚拟现实(VR)是当今IT领域的两大热点技术。计算机视觉(Computer Vision, CV)是研究如何让机器“看”的学科,它让计算机能够从图像或视频中识别、处理和理解信息。而虚拟现实则通过计算机技术创建出一种三维的模拟环境,使用户沉浸在一个包围式的虚拟世界中。Python,作为一种广泛使用的高级编程语言,因其简洁的语法和强大的库支持,在计算机视觉和VR开发中扮演着越来越重要的角色。接下来的章节将详细介绍这两项技术的理论基础、应用实践以及未来的发展方向,帮助读者快速掌握计算机视觉和Python在VR领域的应用之道。
# 2. 计算机视觉的理论基础
### 2.1 图像处理的基本理论
计算机视觉技术的核心之一是对图像进行处理和分析。要理解这一领域的理论基础,首先需要掌握图像的数字化和像素操作原理,以及图像滤波与边缘检测技术。
#### 2.1.1 图像的数字化与像素操作
数字图像处理技术是计算机视觉的基础。在这一部分中,我们将探讨如何将真实世界中的图像转换为计算机可以理解的数字形式,并进一步对这些图像中的像素进行操作。
在计算机中,一幅图像被表示为像素阵列,每个像素包含了颜色和亮度信息。图像的数字化过程涉及采样和量化。采样是将连续的图像空间分割成有限数量的小区域的过程,而量化则是将每个区域的像素值从一个连续的范围映射到一个有限的离散集中的过程。最终结果是生成数字图像,通常由二维数组来表示,数组中的每个元素对应一个像素,这个元素的值则对应像素的颜色和强度。
像素操作包括但不限于像素值的修改、像素级的算术运算、以及像素之间的逻辑运算。例如,通过改变像素值,我们可以实现图像的变色效果,或者通过像素级别的算术运算对图像进行亮度调整和对比度增强。
下面是一个简单的图像灰度化处理的Python代码示例,展示了如何对图像中的每个像素进行操作:
```python
import cv2
import numpy as np
# 读取图像
image = cv2.imread('path_to_image.jpg')
# 图像灰度化处理
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 保存灰度图像
cv2.imwrite('gray_image.jpg', gray_image)
```
上述代码中使用了OpenCV库,首先读取一张彩色图片,然后通过`cv2.cvtColor`函数将其转换成灰度图像,最后将转换后的图像保存到磁盘。灰度化处理是将彩色图像转换为灰度图像,其中每个像素点由一个亮度值来表示,这在很多视觉处理任务中是一个常见的预处理步骤。
#### 2.1.2 图像滤波与边缘检测技术
数字图像滤波是一种处理图像的技术,目的是去除图像中的噪声,或对图像进行平滑处理。图像滤波常用的算法包括均值滤波、高斯滤波、中值滤波等。边缘检测技术则用于识别图像中颜色变化显著的区域,常见的边缘检测算子有Sobel算子、Prewitt算子、Canny算子等。
下面是一个使用Sobel算子进行边缘检测的Python代码示例:
```python
import cv2
import numpy as np
# 读取图像
image = cv2.imread('path_to_image.jpg', 0)
# Sobel边缘检测
sobelx = cv2.Sobel(image, cv2.CV_64F, 1, 0, ksize=5)
sobely = cv2.Sobel(image, cv2.CV_64F, 0, 1, ksize=5)
# 合并边缘信息
sobelCombined = cv2.bitwise_or(sobelx, sobely)
# 显示结果
cv2.imshow('Sobel Edges', sobelCombined)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
此代码中,首先使用`cv2.imread`读取了一幅图像,然后通过`cv2.Sobel`函数分别计算图像在X轴和Y轴方向上的梯度,最后通过`cv2.bitwise_or`函数将两个梯度方向的边缘信息合并,并显示出来。
边缘检测技术在计算机视觉领域有广泛的应用,例如在图像分割、目标检测、物体识别等多个任务中,边缘信息都是重要的线索。
### 2.2 计算机视觉算法概述
#### 2.2.1 特征提取与匹配算法
特征提取与匹配是计算机视觉领域中的核心问题之一。它涉及到如何在图像中找到那些可以代表图像内容的显著信息点,并进一步在不同图像之间找到对应的特征点进行匹配。
特征提取算法的目的是从图像中提取出具有独特性和不变性的信息,常见的特征提取算法有SIFT(尺度不变特征变换)、SURF(加速稳健特征)、ORB(Oriented FAST and Rotated BRIEF)等。这些算法能够从图像中提取出具有代表性的关键点,并为每个关键点生成描述符,这些描述符可以用来后续的匹配。
特征匹配则是指在两个图像之间识别出具有相似特征描述符的关键点对。特征匹配的成功与否直接关系到后续的视觉任务的准确性,常见的特征匹配算法有暴力匹配、FLANN匹配器、基于学习的匹配器等。
一个基本的特征提取与匹配的Python代码示例如下:
```python
import cv2
import numpy as np
# 读取图像
img1 = cv2.imread('image1.jpg', cv2.IMREAD_GRAYSCALE)
img2 = cv2.imread('image2.jpg', cv2.IMREAD_GRAYSCALE)
# 初始化ORB检测器
orb = cv2.ORB_create()
# 找到关键点和描述符
kp1, des1 = orb.detectAndCompute(img1, None)
kp2, des2 = orb.detectAndCompute(img2, None)
# 创建BFMatcher对象
bf = cv2.BFMatcher(cv2.NORM_HAMMING, crossCheck=True)
# 进行匹配
matches = bf.match(des1, des2)
# 根据距离排序
matches = sorted(matches, key=lambda x: x.distance)
# 绘制前10个匹配项
img3 = cv2.drawMatches(img1, kp1, img2, kp2, matches[:10], None, flags=2)
# 显示结果
cv2.imshow('Matches', img3)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
在这个代码中,使用了ORB算法检测和计算了两幅图像的关键点及其描述符。然后使用BFMatcher对象进行特征匹配,最后通过`cv2.drawMatches`函数将匹配结果绘制到一个新图像上并显示出来。
#### 2.2.2 目标识别与分类方法
目标识别与分类是计算机视觉另一个重要的研究领域,涉及将图像或图像的一部分与特定的类别或对象对应起来。深度学习中的卷积神经网络(CNN)由于其出色的特征提取能力,在目标识别与分类任务中获得了广泛的应用。
目标识别与分类的流程一般包括图像预处理、特征提取、分类器训练和分类器应用等几个步骤。在深度学习领域,通常使用预训练的网络模型作为特征提取器,然后使用少量标注数据训练一个分类层来完成分类任务。
下面是一个简单的使用Keras框架实现的图像分类代码示例:
```python
from keras.preprocessing.image import ImageDataGenerator
from keras.models import Sequential
from keras.layers import Dense, Conv2D, Flatten, MaxPooling2D
from keras.utils import to_categorical
# 载入数据并预处理
train_data_dir = 'path_to_train_data'
validation_data_dir = 'path_to_validation_data'
# 创建模型结构
model = Sequential()
model.add(Conv2D(32, (3, 3), input_shape=(img_width, img_height, 3), activation='relu'))
model.add(MaxPooling2D(pool_size=(2, 2)))
model.add(Flatten())
model.add(Dense(128, activation='relu'))
model.add(Dense(num_classes, activation='softmax'))
# 编译模型
model.compile(loss='categorical_crossentropy', optimizer='adam', metrics=['accuracy'])
# 数据增强
train_datagen = ImageDataGenerator(
rescale=1. / 255,
shear_range=0.2,
zoom_range=0.2,
horizontal_flip=True)
test_datagen = ImageDataGenerator(rescale=1. / 255)
# 在训练集和验证集上应用数据增强
train_generator = train_datagen.flow_from_directory(
train_data_dir,
target_size=(img_width, img_height),
batch_size=batch_size,
class_mode='categorical')
validation_generator = test_datagen.flow_from_directory(
validation_data_dir,
target_size=(img_width, img_height),
batch_size=batch_size,
class_mode='categorical')
# 训练模型
model.fit_generator(
train_generator,
steps_per_epoch=nb_train_samples // batch_size,
epochs=epochs,
validation_data=validation_generator,
validation_steps=nb_validation_samples // batch_size)
```
在这段代码中,首先使用`ImageDataGenerator`对图像数据进行预处理和数据增强,然后构建了一个简单的CNN模型,最后使用`model.fit_generator`方法进行模型训练。通过这种方式,模型能够学习如何从图像中提取有用信息并进行分类。
### 2.3 深度学习在计算机视觉中的应用
#### 2.3.1 卷积神经网络(CNN)基础
卷积神经网络(CNN)是深度学习在计算机视觉领域中最成功的应用之一。CNN通过模拟动物视觉系统的工作方式,对图像进行逐层的特征提取和转换,使其非常适合于图像识别、分类以及更复杂的视觉任务。
CNN的核心组件包括卷积层、激活函数、池化层以及全连接层。卷积层通过卷积操作提取图像的局部特征;激活函数引入非线性,使得模型能够学习复杂的特征;池化层减少数据的空间大小,同时保留重要的信息;全连接层则负责将学习到的特征映射到最终的输出,如类别标签。
下面是一个CNN的简单架构示例代码:
```python
from keras.models import Sequential
from keras.layers import Conv2D, MaxPooling2D, Flatten, Dense
# 构建CNN模型
model = Sequential()
# 添加卷积层
model.add(Conv2D(32, (3, 3), activation='relu', input_shape=(64, 64, 3)))
# 添加池化层
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《Python与虚拟现实的探索》专栏深入探讨了Python在虚拟现实(VR)开发中的应用。它提供了全面的指南,涵盖从构建VR应用的实用步骤到优化开发流程的策略。专栏还深入研究了Python VR驱动,揭示了虚拟现实背后的秘密。此外,它还对Python虚拟现实库进行了深入比较,并提供了扩展模块指南,帮助开发人员从新手提升为专家。专栏还探讨了计算机视觉、数据处理和网络编程在Python VR中的应用,以及沉浸式音频体验的技巧。通过这些丰富的主题,本专栏为希望探索Python在VR开发中潜力的开发人员提供了宝贵的见解和实用技巧。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【性能调优秘笈】:Windows Server 2008 R2 iSCSI性能突破关键设置
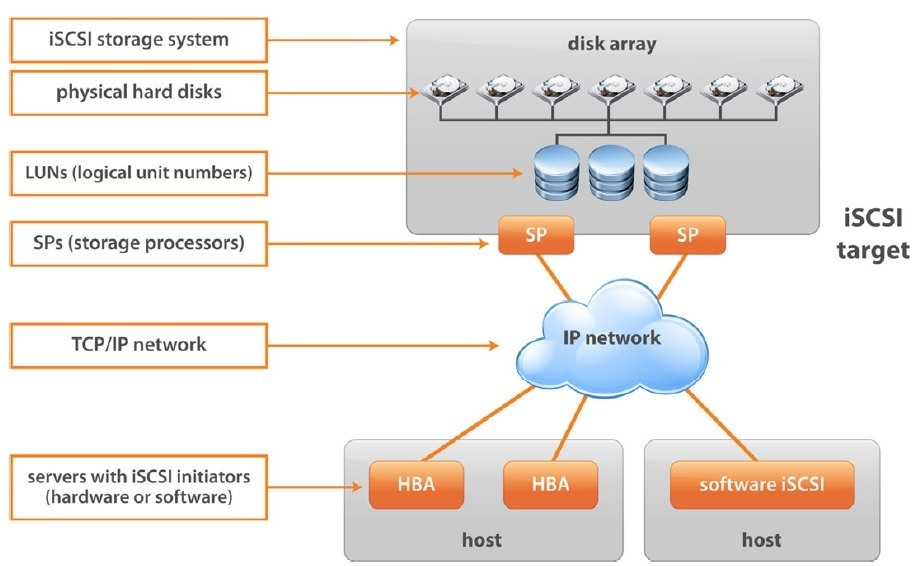
# 摘要
本文针对iSCSI技术及其性能优化进行详细探讨,同时分析Windows Server 2008 R2网络配置的优化策略和iSCSI存储连接的性能提升方法。文章首先介绍了iSCSI的基本概念和影响性能的关键因素,随后深入探讨了网络适配器绑定、负载均衡
机器视觉系统中的线阵相机:关键角色与深远影响分析
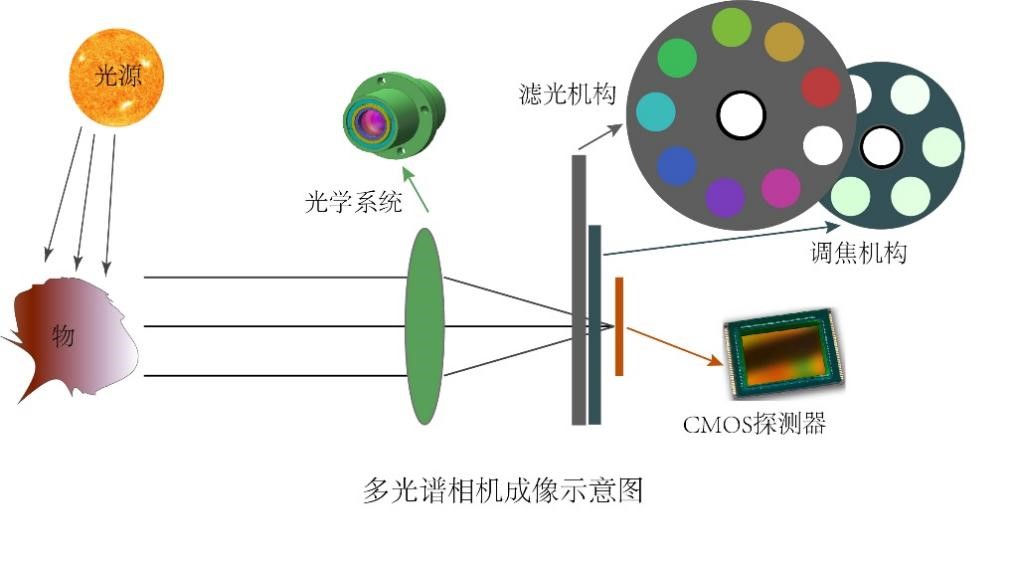
# 摘要
机器视觉在现代自动化和智能制造领域中扮演着核心角色,其中线阵相机作为一种重要的视觉检测设备,具有独特的优势和广泛应用前景。本文首先介绍了机器视觉与线阵相机的基本概念和工作原理,探讨了其关键技术指标、接口与数据传输方式。随后,深入分析了线阵相机在表面检测、条码识别、精密测量等领域的应用,并讨论了在应用中遇到的技术挑战和未来创新方向。文章最后通过实践案例展示了线阵相机在不同工业场景下的应用效果,
LPDDR5电源管理优化指南:基于JEDEC JESD209-5B标准的节能策略
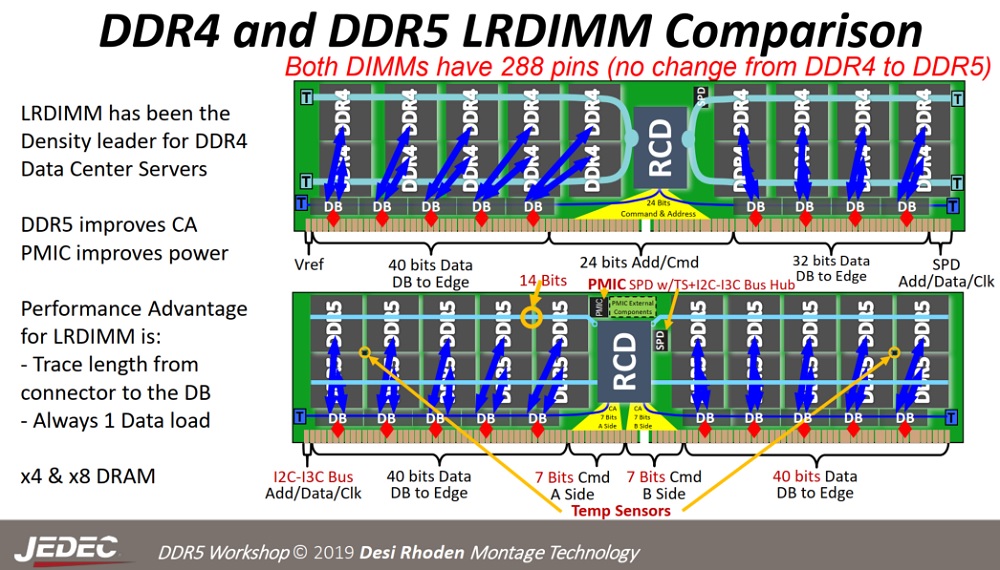
# 摘要
本文综述了LPDDR5内存技术及其电源管理策略。首先对LPDDR5内存技术进行全面概览,然后详解了JEDEC JESD209-5B标准,强调了其电源管理要求和与其他LPDDR标准的对比。在理论基础部分,深入探讨了电源管理的理论模型和节能策略。实践应用章节详细描述了优化配置步骤、案例分析以及测试与验证方法。随
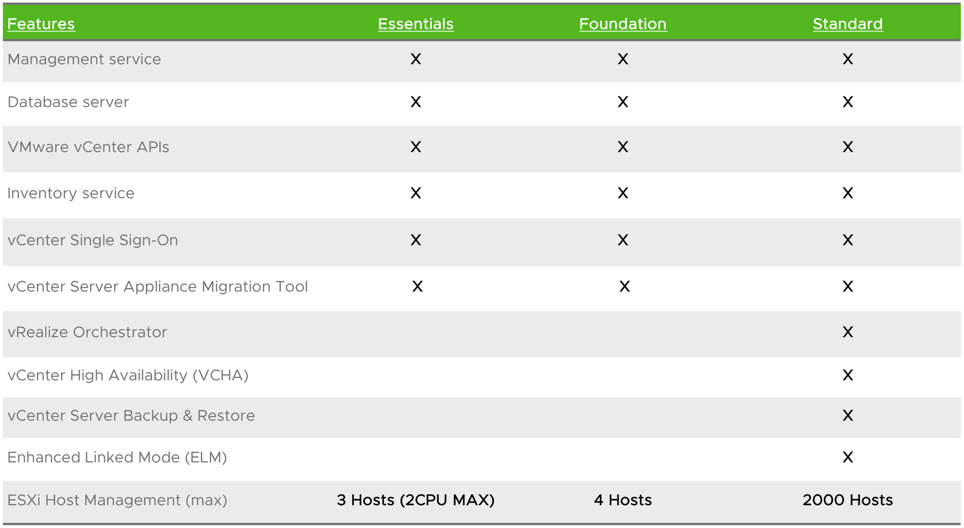
【存储性能优化】:基于SAM-5模型的存储系统优化秘籍

# 摘要
随着信息技术的飞速发展,存储性能优化成为提升系统效率的关键。本文首先介绍了存储性能优化的基础知识,然后深入解析了SAM-5模型,并讨论了其核心组件与性能指标。通过理论分析,我们识别了性能瓶颈并制定了调优策略,强调了理论与实践结合的重要性。文章进一步通过存储系统的实践案例,展示了硬件和软件优化的实际成效,以及综合优化策略如何助力业务增长。在高级应用部分,探讨了SAM-5模型在云存储
【iOS数据持久化:沙盒环境的本地存储解决方案】

# 摘要
本文针对iOS平台数据持久化技术进行了全面概述,从基础的数据存储环境和方法到高级的数据库操作与优化策略,详细介绍了iOS系统中数据持久化的关键概念、技术和应用场景。通过
【故障排除专家】:vcsmx_ucli.pdf问题快速解决策略
# 摘要
本文全面探讨了vcsmx_ucli.pdf文件在系统运行中所扮演的角色、潜在问题及其解决方案。通过对文件结构进行解析,阐述了文件头部信息、数据区块和索引机制的工作原理及其重要性。文章详细介绍了vcsmx_ucli.pdf文件错误类型、系统日志分析,以及修复和恢复策略,包括手动和自动化工具的应用。同时,强调了文
电磁兼容性在偶校验电路设计中的考量:专业指南

# 摘要
随着电子设备的普及和高速信号处理的需求增长,电磁兼容性(EMC)成为了电子工程设计中的关键因素之一。本文首先概述了电磁兼容性的基本概念,然后介绍了偶校验电路设计的
【EtherCAT同步技术全解析】:深入挖掘工业自动化中的性能优化
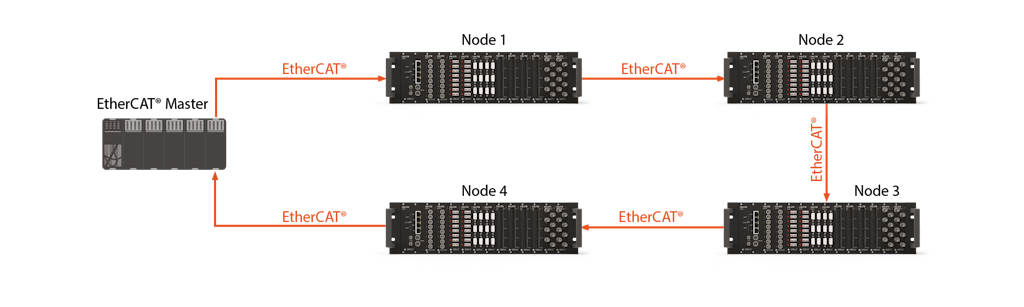
# 摘要
本文全面综述了EtherCAT同步技术及其在工业自动化领域的应用。首先介绍了EtherCAT技术的理论基础,涵盖工业以太网和EtherCAT协议的工作原理,同步机制和网络拓扑结构。接着深入探讨了技术的实现细节,包括主站和从站的通信、同步过程以及配置和故障排除方法。文章还着重分析了性能优化方面,涉及系统时延分
【安全运维自动化】:网神SecVSS 3600的自动化秘诀,提高你的安全运维效率
# 摘要
随着信息技术的飞速发展,安全运维自动化已成为保障企业网络安全的重要手段。本文从安全运维自动化的基础与意义出发,详细介绍了网神SecVSS 3600平台的架构、核心
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )