工业通信的可靠选择:STM32单片机CAN编程详解,打造稳定通信网络
发布时间: 2024-07-04 15:51:55 阅读量: 48 订阅数: 25 
# 1. STM32单片机CAN总线概述**
CAN(Controller Area Network)总线是一种广泛应用于工业自动化、汽车电子等领域的现场总线技术。它以其高可靠性、实时性、抗干扰能力强等优点而著称。
STM32单片机集成了CAN控制器外设,支持CAN总线通信。通过使用CAN总线,STM32单片机可以与其他设备进行数据交换,实现分布式控制和信息共享。CAN总线在STM32单片机中的应用主要包括:
* 工业自动化控制系统:用于连接传感器、执行器、控制器等设备,实现数据采集、控制指令下发等功能。
* 车载通信系统:用于连接ECU(电子控制单元)、传感器、执行器等设备,实现车辆信息交换、故障诊断等功能。
# 2. CAN总线编程理论
### 2.1 CAN总线协议及帧格式
CAN总线采用多主总线结构,所有节点都可以平等地访问总线。CAN总线协议定义了通信帧格式,帧格式包括以下字段:
| 字段 | 长度(位) | 描述 |
|---|---|---|
| 起始位 | 1 | 逻辑低电平,表示帧的开始 |
| 仲裁场 | 11/12/29 | 用于仲裁总线访问权,优先级由低到高 |
| 控制场 | 6 | 控制帧的长度和类型 |
| 数据场 | 0-64 | 携带数据信息 |
| CRC场 | 15/16 | 循环冗余校验,用于检测数据错误 |
| ACK场 | 2 | 应答位,表示接收节点正确接收帧 |
| 结束位 | 7 | 逻辑高电平,表示帧的结束 |
### 2.2 CAN总线硬件接口及驱动
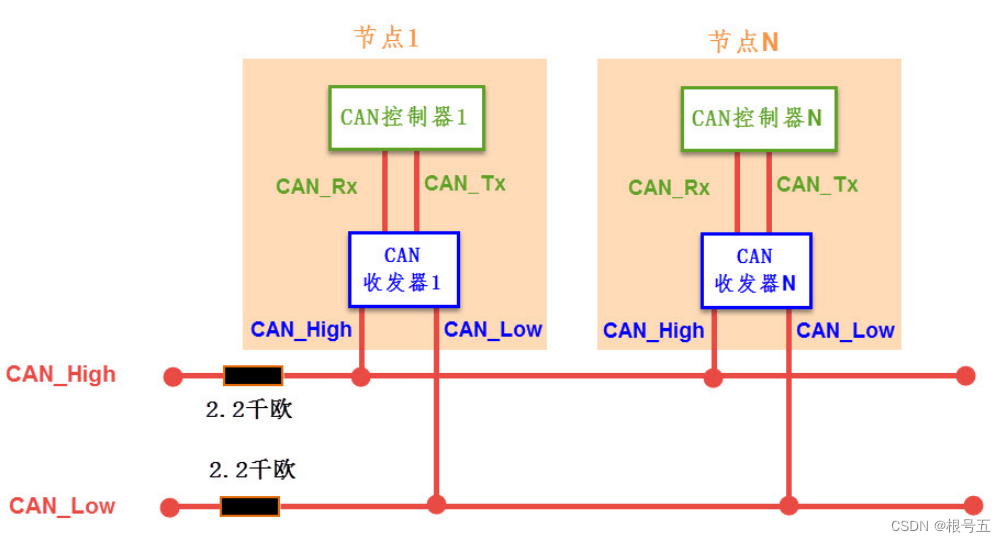
#### CAN总线接口
CAN总线接口通常由CAN收发器和CAN控制器组成。CAN收发器负责物理层通信,将差分信号转换为单端信号,反之亦然。CAN控制器负责协议层通信,处理CAN总线协议。
#### CAN总线驱动
CAN总线驱动程序负责管理CAN控制器,提供以下功能:
- 初始化CAN控制器
- 配置CAN控制器参数
- 发送和接收CAN帧
- 处理中断和错误
### 2.3 CAN总线通信协议栈
CAN总线通信协议栈通常包括以下层:
| 层级 | 功能 |
|---|---|
| 物理层 | 提供物理连接和信号传输 |
| 数据链路层 | 负责帧的封装、发送和接收 |
| 网络层 | 负责节点寻址和路由 |
| 应用层 | 提供应用程序接口,用于发送和接收数据 |
**代码块:CAN总线通信协议栈**
```c
#include "can.h"
void can_init(void)
{
// 初始化CAN控制器
CAN_InitTypeDef can_init_struct;
can_init_struct.CAN_TTCM = DISABLE;
can_init_struct.CAN_ABOM = DISABLE;
can_init_struct.CAN_AWUM = DISABLE;
can_init_struct.CAN_NART = DISABLE;
can_init_struct.CAN_RFLM = DISABLE;
can_init_struct.CAN_TXFP = DISABLE;
can_init_struct.CAN_Mode = CAN_Mode_Normal;
can_init_struct.CAN_SJW = CAN_SJW_1tq;
can_init_struct.CAN_BS1 = CAN_BS1_1tq;
can_init_struct.CAN_BS2 = CAN_BS2_1tq;
can_init_struct.CAN_Prescaler = 4;
CAN_Init(&can_init_struct);
}
void can_send_frame(CAN_HandleTypeDef *hcan, uint32_t id, uint8_t *data, uint8_t len)
{
// 发送CAN帧
CAN_TxHeaderTypeDef tx_header;
tx_header.StdId = id;
tx_header.ExtId = 0;
tx_header.RTR = CAN_RTR_Data;
tx_header.IDE = CAN_ID_STD;
tx_header.DLC = len;
tx_header.TransmitGlobalTime = DISABLE;
CAN_Transmit(hcan, &tx_header, data);
}
void can_receive_frame(CAN_HandleTypeDef *hcan, uint32_t *id, uint8_t *data, uint8_t *len)
{
// 接收CAN帧
CAN_RxH
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏《STM32单片机说明书》是一份全面的指南,旨在帮助初学者和经验丰富的开发人员掌握STM32单片机的各个方面。从入门基础到高级编程技巧,专栏涵盖了STM32单片机开发的各个阶段。
专栏内容包括:开发环境搭建、GPIO编程、定时器编程、中断编程、ADC编程、DMA编程、I2C编程、SPI编程、UART编程、CAN编程、USB编程、RTOS编程、固件更新、调试技巧、性能优化、项目实战、高级编程技巧、嵌入式系统设计和工业应用。
通过循序渐进的教程和深入的讲解,专栏帮助读者从零基础快速掌握STM32单片机的编程和应用,并探索单片机的更多可能性。无论是初学者还是经验丰富的开发人员,都可以通过本专栏提升自己的STM32单片机开发技能。
专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【技术报告格式化策略】:Markdown与LaTeX混合使用的高级指南

# 1. Markdown与LaTeX混合使用的概念与优势
在撰写技术文档时,效率和格式的统一性是至关重要的因素。Markdown与LaTeX的混合使用正是为了解决这一痛点而诞生的。**Markdown**,以其轻量级和易读易写的特点,被广泛用于编写快速文档和网页内容。相反,**LaTeX**,
数据持久化解决方案:Arcade库存档与读档机制解析
# 1. 数据持久化基础概念解析
在现代IT行业中,数据持久化是确保数据稳定存储并可供后续访问的核心概念。它不仅涉及到数据的存储介质选择,还涵盖了数据结构、存储策略和访问效率等多方面因素。理解数据持久化的基础概念对于开发高效、稳定的应用程序至关重要。
## 1.1 数据持久化的定义
数据持久化指的是将数据保存在可以持续存储的介质中
【Python性能测试实战】:cProfile的正确打开方式与案例分析

# 1. Python性能测试基础
在Python开发中,性能测试是确保应用程序能够高效运行的关键环节。本章将概述性能测试的基础知识,为后续章节深入探讨cProfile工具及其在不同场景下的应用打下坚实的基础。
## 1.1 Python性能测试的重要性
Python由于其简洁性和高效的开发周期,在多个领域内得到了广泛的应用。但Python的动态特性和解释执行机制,有时候也会成为性能
Panda3D虚拟现实集成:创建沉浸式VR体验的专家指南

# 1. Panda3D虚拟现实基础
## 简介
Panda3D是一个开源的3D游戏引擎,它特别适合于虚拟现实(VR)应用的开发,因为其能够轻松处理复杂的三维世界和实时物理模拟。它以其高效、易于使用的API而受到欢迎
【终端编程的未来】:termios在现代终端设计中的角色和影响
# 1. 终端编程的进化与概念
终端编程是计算机科学领域的一个基础分支,它涉及与计算机交互的硬件和软件的接口编程。随着时间的推移,终端编程经历了从物理打字机到现代图形用户界面的演变。本章我们将探讨终端编程的进化过程,从最初的硬件直接控制到抽象层的设计和应用,及其相关的概念。
## 1.1 终端编程的起源和早期发展
在计算机早期,终
【自动化API文档生成】:使用docutils与REST API的实践案例

# 1. 自动化API文档生成的背景与意义
在当今这个快速发展、高度互联的世界中,API(应用程序编程接口)成为了不同软件系统之间交互的核心。随着API数量的激增和复杂性的提升,如何有效地管理和维护文档成为了开发者和企业面临的一大挑战。自动化API文档生成技术的出现,为解决这一
requests-html库进阶
# 1. requests-html库简介
在当今信息技术迅猛发展的时代,网络数据的抓取与分析已成为数据科学、网络监控以及自动化测试等领域不可或缺的一环。`requests-html`库应运而生,它是在Python著名的`requests`库基础上发展起来的,专为HTML内容解析和异步页面加载处理设计的工具包。该库允许用户方便地发送HTTP请求,解析HTML文档,并能够处理JavaScript
【Pyglet教育应用开发】:创建互动式学习工具与教育游戏

# 1. Pyglet入门与环境配置
欢迎进入Pyglet的编程世界,本章节旨在为初学者提供一个全面的入门指导,以及详尽的环境配置方法。Pyglet是一个用于创建游戏和其他多媒体应用程序的跨平台Python库,它无需依赖复杂的安装过程,就可以在多种操作系统上运行。
## 1.1 Pyglet简介
Pyglet是一个开源的Python库,特别适合于开发游戏和多媒体应
【Django模型字段测试策略】:专家分享如何编写高效模型字段测试用例
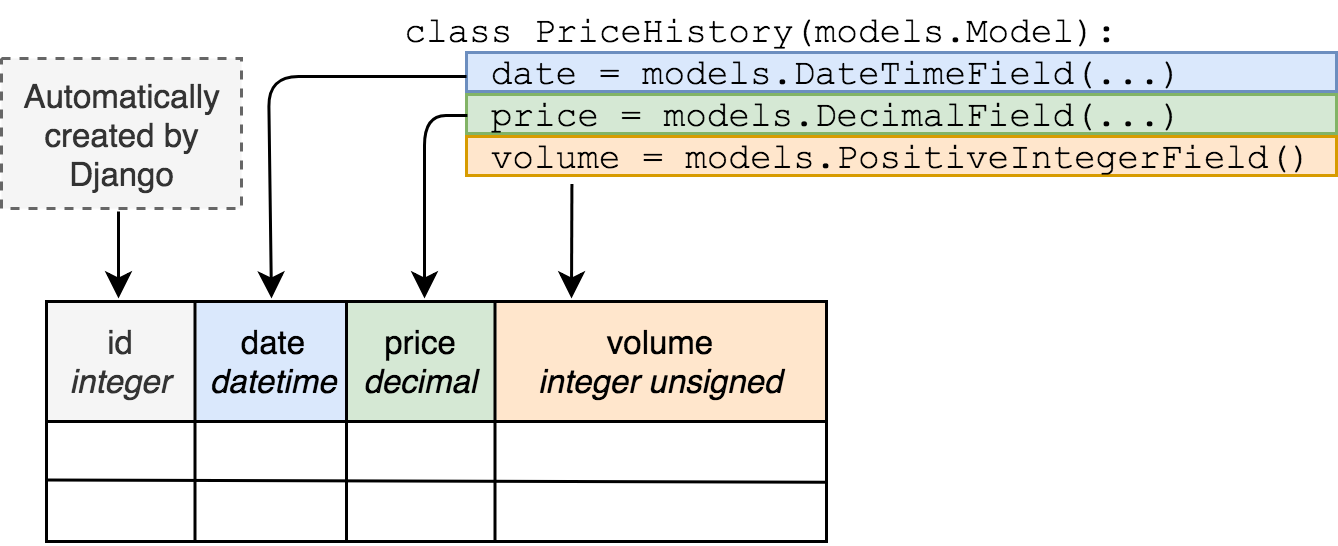
# 1. Django模型字段概述
## Django模型字段概述
Django作为一款流行的Python Web框架,其核心概念之一就是模型(Models)。模型代表数据库中的数据结构,而模型字段(Model Fields)则是这些数据结构的基石,它们定义了存储在数据库中每个字段的类型和行为。
简单来说,模型字段就像是数据库表中的列,它确定了数据的类型(如整数、字符串或日期
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )