XJC-608T-C与Modbus RTU模式:深入探讨与应用案例(专家级应用)
发布时间: 2024-12-25 13:06:22 阅读量: 4 订阅数: 7 

XJC-608T-C压力控制器说明书+modbus通讯简易说明.pdf
# 摘要
本文首先介绍了Modbus RTU协议的基本概念和XJC-608T-C硬件的特点。接着深入探讨了Modbus RTU协议的结构、特点、帧结构以及通信模式,详细分析了主站与从站的配置和超时重试机制。然后,文章重点阐述了XJC-608T-C模块在Modbus RTU通信中的集成方法、数据处理流程和高级功能应用。在应用案例分析章节,本文探讨了Modbus RTU在工业自动化、能源管理和智能建筑中的具体实践和实现。第五章讲述了性能优化和故障排查策略,包括通信速度提升和故障解决方法。最后,第六章展望了Modbus RTU的安全特性、与新兴技术的融合以及XJC-608T-C的发展前景,为读者提供了专家级技巧和对未来发展路径的深入洞察。
# 关键字
Modbus RTU协议;XJC-608T-C硬件;通信性能优化;故障排查;物联网技术;数据处理
参考资源链接:[XJC-608T-C压力控制器说明书+modbus通讯简易说明.pdf](https://wenku.csdn.net/doc/6460809d543f8444888e4c9b?spm=1055.2635.3001.10343)
# 1. Modbus RTU协议概述与XJC-608T-C硬件介绍
## 1.1 Modbus RTU协议概述
Modbus RTU(Remote Terminal Unit)是一种在串行线路上实现主从式通讯的协议,广泛应用于工业领域。它使用二进制编码,通过RS-232、RS-422、RS-485等物理层标准进行通信,特别适合于远距离、高可靠性数据交换环境。Modbus RTU协议以其简洁高效、开放性强的特点,被众多设备制造商所采纳,成为工业控制领域事实上的标准之一。
## 1.2 XJC-608T-C硬件介绍
XJC-608T-C是一款具备Modbus RTU通信功能的多功能控制器,它集成了高性能的处理器和丰富的输入输出接口,可以广泛应用于楼宇自控、环境监控、设备管理等多种场景。该控制器设计小巧,易于集成,支持多达8个通道的模拟信号输入,以及相应的数字量输入输出。硬件上,它通过RS-485接口实现Modbus RTU通信,用户可以通过简单的配置,将其作为Modbus RTU网络中的从站设备,实现与主站的稳定通信。
## 1.3 Modbus RTU协议与XJC-608T-C的结合
通过将Modbus RTU协议与XJC-608T-C控制器结合起来,我们不仅能够获得一个灵活、可靠的通信平台,还能够通过控制器实现对现场设备的精准控制和状态监测。在接下来的章节中,我们将深入探讨Modbus RTU协议的详细机制,以及如何在XJC-608T-C上应用和优化这些机制,从而进一步提高整个系统的性能和可靠性。
# 2. 深入理解Modbus RTU通信协议
## 2.1 Modbus RTU协议基础
### 2.1.1 协议结构和特点
Modbus RTU(Remote Terminal Unit)是一种在串行通信中广泛使用的协议。它以二进制形式表示数据,提高了数据处理的速度和效率。Modbus RTU协议的主要特点是其结构简单、易于理解和实现。
Modbus RTU消息以设备地址开头,紧接着是功能码,它标识了请求的动作类型,如读取寄存器、写入单个寄存器、读取线圈状态等。然后是数据,它的数量和类型由功能码决定。最后是错误检测码(CRC校验),用于检测传输过程中可能出现的错误。
一个典型的Modbus RTU消息帧如下所示:
```
地址 功能码 数据 CRC
```
这种简洁的帧结构使得Modbus RTU协议非常适用于对实时性要求高的工业应用。
### 2.1.2 请求与响应格式
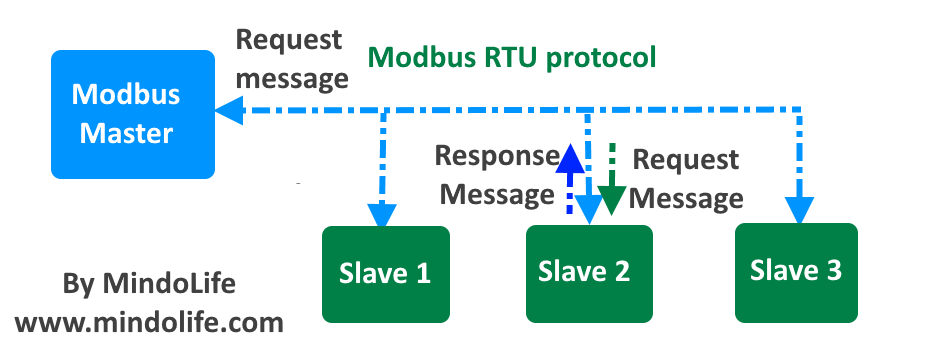
在Modbus RTU协议中,通信过程可以分为请求和响应两个部分。主站(Client)发送请求消息到从站(Server),从站处理请求后返回响应消息给主站。如果请求消息格式不正确或发生错误,从站将返回一个异常响应。
请求格式通常如下:
```
地址(1 byte) + 功能码(1 byte) + 数据(N bytes) + CRC(2 bytes)
```
响应格式如下:
```
地址(1 byte) + 功能码(1 byte) + 数据(N bytes) + CRC(2 bytes)
```
在响应中,如果功能码表示的是读取数据请求,则返回数据;如果是写入数据请求,通常返回确认消息,表明写入成功。
## 2.2 Modbus RTU帧结构分析
### 2.2.1 地址、功能码、数据和校验
在Modbus RTU帧中,每个字段都承载了特定的含义和功能。
- 地址字段标识了消息的目标设备,通常是由从站设备的ID表示。
- 功能码指定从站要执行的操作类型,例如读取保持寄存器、写入单个线圈等。
- 数据字段根据功能码的不同,可以包含不同的信息,如寄存器的地址和值、线圈的状态等。
- CRC校验用于确保数据的完整性,防止在传输过程中发生错误。
下面的表格简要说明了Modbus RTU帧的基本结构:
| 字段 | 长度 | 描述 |
|------------|---------|--------------------------------|
| 设备地址 | 1 byte | 目标设备的标识 |
| 功能码 | 1 byte | 表示请求的动作类型 |
| 数据 | N bytes | 功能码定义的数据内容 |
| CRC校验码 | 2 bytes | 用于错误检测的循环冗余校验码 |
### 2.2.2 帧解析及故障诊断方法
解析Modbus RTU帧需要仔细检查每一部分,确保数据的准确性和完整性。CRC校验是诊断错误的重要工具。如果接收方计算出的CRC与消息中携带的CRC不一致,说明帧中存在错误。
下面是一个简单的CRC计算方法伪代码:
```python
def crc16(data):
crc = 0xFFFF
for byte in data:
crc ^= byte
for _ in range(8):
if (crc & 0x0001):
crc = (crc >> 1) ^ 0xA001
else:
crc >>= 1
return crc
```
在实际应用中,如果发现错误,需要重新发送消息或者采取其他措施来纠正错误。故障诊断方法还包括检查通信线缆、确认波特率设置等。
## 2.3 Modbus RTU通信模式详解
### 2.3.1 主站与从站配置
Modbus RTU协议支持多主站与多从站的配置,但为了保证通信的稳定性,通常在一个通信网络中只配置一个主站和多个从站。
主站负责发起通信请求并处理从站的响应。从站响应主站的请求,并执行相应的数据读取或写入操作。
配置主站和从站的步骤通常包括设置设备地址、波特率、数据位、停止位和奇偶校验位等参数。确保主从站的这些参数完全匹配是通信成功的关键。
### 2.3.2 超时和重试机制
在Modbus RTU通信中,超时和重试机制是保证通信可靠性的重要组成部分。如果从站没有在规定时间内响应,主站应等待一段时间后重发请求。重试次数应根据实际情况设定,过多的重试可能会导致通信延迟增加。
下面是简单的超时和重试机制逻辑伪代码:
```python
def send_request_with_retry():
max_retries = 3
timeout = 1 # seconds
retries = 0
while retries < max_retries:
response = send_modbus_request()
if response is not None:
return response
retries += 1
time.sleep(timeout)
raise TimeoutError("Max retries exceeded without a response")
```
这个函数首先尝试发送请求,如果失败,它会等待指定的超时时间后重试,直到达到最大重试次数。如果重试失败,则抛出超时异常。
# 3. XJC-608T-C在Modbus RTU中的应用
XJC-608T-C作为一款支持Modbus RTU协议的模块化设备,提供了一系列接口和功能,使其在工业自动化系统中得到了广泛的应用。本章将详细介绍XJC-608T-C与Modbus RTU协议的集成方法、数据处理方式以及高级功能的应用。
##

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
从0到1:打造SMPTE SDI视频传输解决方案,pg071-v-smpte-sdi应用实践揭秘

# 摘要
随着数字媒体技术的发展,SMPTE SDI视频传输技术已成为广播电视台和影视制作中心的重要标准。本文首先概述了SMPTE SDI技术的原理、标准及接口设备,其次详细分析了基于SMPTE SDI的视频传输解决方案的
【深入探究Word表格边框故障】:原因分析与对策
# 摘要
本论文专注于Word表格边框的构成、功能以及相关的故障类型与影响。通过对表格边框渲染机制和设计原则的理论分析,探讨了软件兼容性、硬件资源限制和用户操作习惯等因素导致的边框故障。提出了一套系统的故障诊断与解决方法,并通过案例分析展示了实际问题的解决过程。最后,论文详细论述了表格边框故障的预防与维护策略,包括建立
【物体建模进阶】:VB布尔运算技巧从入门到精通
# 摘要
本文综合探讨了布尔运算在物体建模领域的理论与实践应用。首先,介绍了布尔运算的基础理论,包括基本概念、规则和性质,并在三维空间中的应用进行了深入分析。其次,通过VB编程语言的实例展示了布尔运算的实现技巧,涵盖了语言基础、内置函数以及代码逻辑优化。文章进一步探讨了布尔运算在3D建模软件中的应用,分析了建模工具的实际案例,并提出了错误处理和优化建议。最后,本文探索了高级布尔建模技巧以及布尔运算在艺术创作中的
【Cortex-M4处理器架构详解】:从寄存器到异常处理的系统剖析
# 摘要
本文全面介绍了Cortex-M4处理器的架构、高级特性和编程技术。首先概述了处理器的核心组成及其基础架构,重点分析了内存管理单元(MMU)的工作原理和异常处理机制。接下来,文中深入探讨了Cortex-M4的高级特性,包括中断系统、调试与跟踪技术以及电源管理策略。然后,文章详细阐述了Cortex-M4的指令集特点、汇编语言编程以及性能优化方法。最后,本文针对Cortex-M4的硬件接口和外设功能,如总线标准、常用外设的控制和外设通信接口进行了分析,并通过实际应用案例展示了实时操作系统(RTOS)的集成、嵌入式系统开发流程及其性能评估和优化。整体而言,本论文旨在为工程师提供全面的Cort
【技术对比】:Flash vs WebGL,哪种更适合现代网页开发?
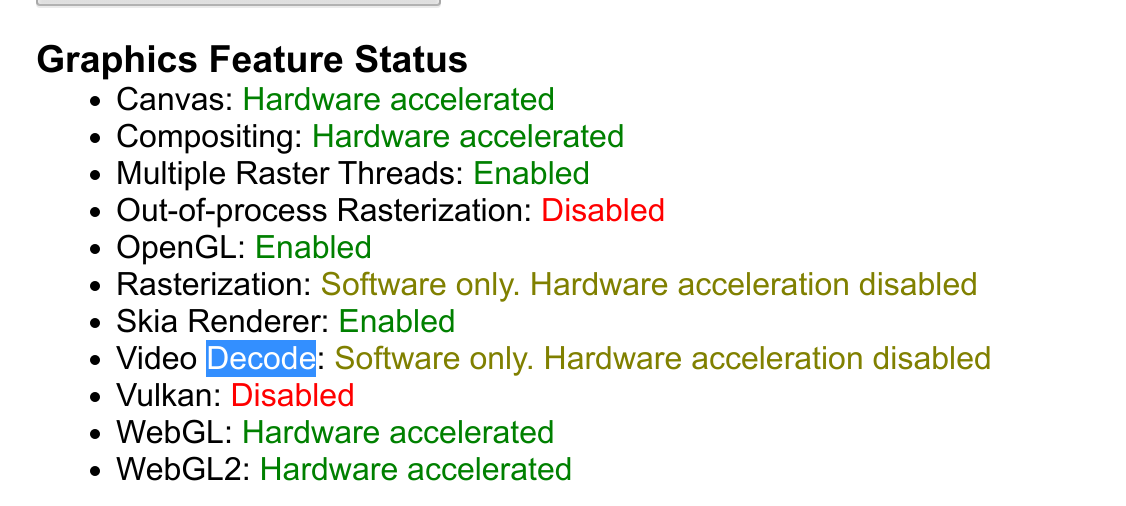
# 摘要
本文全面比较了Flash与WebGL技术的发展、架构、性能、开发实践以及安全性与兼容性问题,并探讨了两者的未来趋势。文章首先回顾了Flash的历史地位及WebGL与Web标准的融合,接着对比分析了两者在功能性能、第三方库支持、运行时表现等方面的差异。此外,文章深入探讨了各自的安全性和兼容性挑战,以及在现
零基础LabVIEW EtherCAT通讯协议学习手册:起步到精通
# 摘要
随着工业自动化和控制系统的不断发展,LabVIEW与EtherCAT通讯协议结合使用,已成为提高控制效率和精度的重要技术手段。本文首先介绍了LabVIEW与EtherCAT通讯协议的基础概念和配置方法,然后深入探讨了在LabVIEW环境下实现EtherCAT通讯的编程细节、控制策略以及诊断和错误处理。接下来,文章通过实际应用案例,分析了La
51单片机电子密码锁设计:【项目管理】与【资源规划】的高效方法
# 摘要
本文综述了51单片机电子密码锁的设计与实现过程,并探讨了项目管理在该过程中的应用。首先,概述了51单片机电子密码锁的基本概念及其在项目管理理论与实践中的应用。接下来,深入分析了资源规划的策略与实
【探索TouchGFX v4.9.3高级功能】:动画与图形处理的终极指南

# 摘要
TouchGFX作为一个面向嵌入式显示系统的图形库,具备强大的核心动画功能和图形处理能力。本文首先介绍了TouchGFX v4.9.3的安装与配置方法,随后深入解析了其核心动画功能,包括动画类型、实现机制以及性能优化策略。接着,文中探讨了图形资源管理、渲染技术和用户界面优化,以提升图形处理效率。通过具体案例分析,展示了TouchGFX
【Docker持久化存储】:阿里云上实现数据不丢失的3种方法
# 摘要
本文详细探讨了Docker持久化存储的概述、基础知识、在阿里云环境下的实践、数据持久化方案的优化与管理,以及未来趋势与技术创新。首先介绍了Docker卷的基本概念、类型和操作实践,然后聚焦于阿里云环境,探讨了如何在阿里云ECS、RDS和NAS服务中实现高效的数据持久化。接着,文章深入分析了数据备份与恢复策略,监控数据持久化状态的重要性以及性能优化与故障排查方法。最后,展望了
【编程进阶之路】:ITimer在优化机器人流程中的最佳实践

# 摘要
ITimer作为一种定时器技术,广泛应用于编程和机器人流程优化中。本文首先对ITimer的基础知识和应用进行了概述,随后深入探讨了其内部机制和工作原理,包括触发机制和事件调度中的角色,以及核心数据结构的设计与性能优化。文章进一步通过具体案例,阐述了ITimer在实时任务调度、缓存机制构建以及异常处理与恢复流程中的应用
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )