STM32 CAN总线实现与故障排除:实用指南与技巧


STM32CubeMX实现STM32 CAN总线
摘要
本文深入探讨了STM32微控制器上CAN(Controller Area Network)总线技术的应用,涵盖基础原理、硬件配置、通信编程、故障排除和性能优化,直至项目案例分析及未来发展趋势。文章首先介绍了CAN总线的基础知识和原理,然后详细阐述了如何进行STM32的硬件配置和初始化,包括物理层要求和软件配置等。在通信编程方面,文章解释了消息发送接收、滤波器和中断管理以及高级特性的实现。故障排除部分提供了信号完整性和错误诊断的实用技巧,而系统性能优化则集中在提高通信速率和减少延时上。最后,文章通过项目案例展示了CAN在实际应用中的集成和管理,并对CAN FD技术、集成式控制器的发展,以及智能化和安全性整合进行展望,强调了CAN技术在智能汽车和物联网中的潜力和安全性重要性。
关键字
STM32;CAN总线;硬件配置;通信编程;故障排除;性能优化;智能化;安全性
参考资源链接:STM32 CCID协议解析与实现指南
1. STM32 CAN总线基础和原理
1.1 CAN总线的起源与发展
控制器局域网络(CAN)是一种强健的车辆总线标准,设计用于允许微控制器和设备交换信息而无需主机计算机。随着汽车电子复杂性的增加,CAN总线成为车内通信的首选协议,具有强大的错误检测能力和良好的实时性能。
1.2 CAN总线工作原理
CAN总线使用非破坏性的仲裁方法,即"线与"(wired-and)方式,确保信息在多主控制网络中的传输。每个消息都由一个唯一的标识符标记,用于优先级判定。CAN总线还采用位填充技术来维持同步,并支持错误检测和处理功能。
1.3 STM32中的CAN模块
STM32微控制器家族集成了多个CAN模块,它们符合CAN 2.0B规范,并支持CAN FD(灵活数据速率)标准。这些模块通常具备强大的过滤功能、报文缓冲管理以及灵活的硬件时钟源配置,使得在设计各种嵌入式应用时能够轻松实现复杂的通信需求。
在本章中,我们将探讨STM32 CAN的基础知识和工作原理,为深入学习其配置和应用打下坚实的基础。
2. ```
第二章:STM32 CAN硬件配置与初始化
2.1 CAN模块的硬件连接
2.1.1 CAN总线的物理层要求
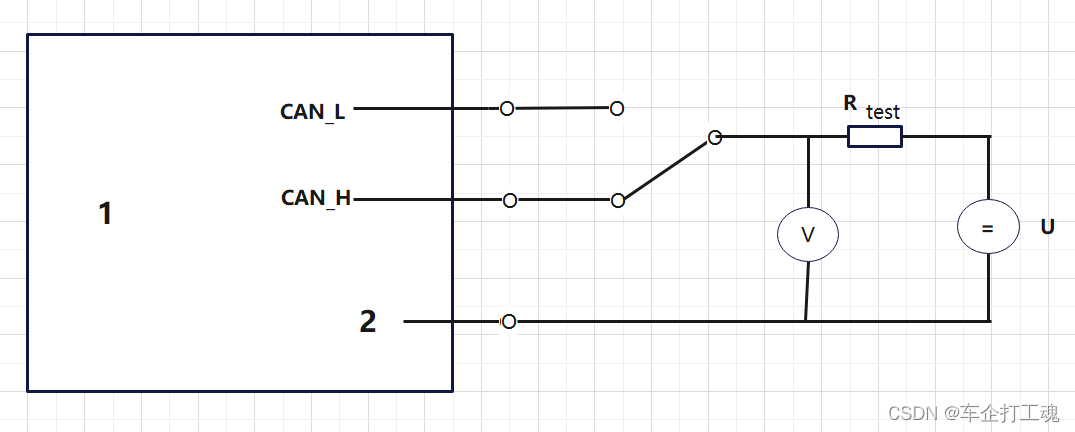
CAN(Controller Area Network)总线是一种多主机串行通信协议,广泛应用于汽车和工业自动化领域。在物理层面上,CAN总线要求使用差分信号传输,以确保数据在嘈杂的工业环境中具有良好的抗干扰能力。两种主要的线是CAN_H和CAN_L,它们通常以120欧姆的终端电阻进行匹配,以减少信号反射。这些物理特性对于确保高速数据传输的准确性和稳定性至关重要。
2.1.2 STM32与CAN收发器的连接方式
STM32微控制器本身不直接驱动物理层的信号线,因此需要一个CAN收发器来转换微控制器的逻辑电平到CAN总线电平。通常使用的收发器是SN65HVD23x系列。连接时,STM32的TX(发送)引脚连接到收发器的TXD(发送数据)引脚,RX(接收)引脚连接到RXD(接收数据)引脚。通过外部电源和两个终端电阻,构建一个完整的CAN网络。以下是构建基本连接的示例代码:
- /* 假定使用的是STM32F103系列,并且GPIO引脚已经设置好 */
- /* 初始化CAN收发器的TX和RX引脚 */
- void CAN章节11_init(void) {
- GPIO_InitTypeDef GPIO_InitStructure;
- /* 使能GPIOB时钟 */
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
- /* 配置PB9为复用推挽输出 */
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOB, &GPIO_InitStructure);
- /* 配置PB8为浮空输入 */
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
- GPIO_Init(GPIOB, &GPIO_InitStructure);
- }
2.2 CAN模块的软件配置
2.2.1 配置GPIO引脚为CAN功能
配置STM32的GPIO引脚为CAN功能时,首先需要使能对应的GPIO端口时钟,并将引脚设置为复用推挽输出模式。这一步是必要的,因为它允许STM32通过GPIO引脚与CAN收发器通信。在初始化函数中,通常还会对GPIO引脚的速率进行配置,以确保能够支持CAN控制器所需的高速通信。以下是代码示例:
- /* 使能AFIO时钟 */
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
- /* 将PA11和PA12引脚配置为复用功能,且设置为复用推挽输出 */
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11 | GPIO_Pin_12;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOA, &GPIO_InitStructure);
2.2.2 初始化CAN控制器参数
初始化CAN控制器涉及设置波特率、时间同步和过滤器等参数。波特率必须与网络中的其他设备匹配。通常,标准的CAN网络可以达到1Mbps的速率,而高速CAN网络甚至可以达到5Mbps。设置错误和过滤器是确保通信稳定性的关键步骤。以下是初始化CAN控制器参数的代码示例:
- void CAN章节22_init(void) {
- CAN_InitTypeDef CAN_InitStructure;
- CAN_FilterInitTypeDef CAN_FilterInitStructure;
- /* CAN初始化 */
- CAN_InitStructure.CAN_TTCM = DISABLE;
- CAN_InitStructure.CAN_ABOM = DISABLE;
- CAN_InitStructure.CAN_AWUM = DISABLE;
- CAN_InitStructure.CAN_NART = DISABLE;
- CAN_InitStructure.CAN_RFLM = DISABLE;
- CAN_InitStructure.CAN_TXFP = DISABLE;
- CAN_InitStructure.CAN_Mode = CAN_Mode_Normal;
- CAN_InitStructure.CAN_SJW = CAN_SJW_1tq;
- CAN_InitStructure.CAN_BS1 = CAN_BS1_4tq;
- CAN_InitStructure.CAN_BS2 = CAN_BS2_3tq;
- CAN_InitStructure.CAN_Prescaler = 9; // 预分频器值
- CAN_Init(CAN章节1章节1章节1, &CAN_InitStructure);
- /* CAN过滤器初始化 */
- CAN_FilterInitStructure.CAN_FilterNumber = 0;
- CAN_FilterInitStructure.CAN_FilterMode = CAN_FilterMode_IdMask;
- CAN_FilterInitStructure.CAN_FilterScale = CAN_FilterScale_32bit;
- CAN_FilterInitStructure.CAN_FilterIdHigh = 0x0000;
- CAN_FilterInitStructure.CAN_FilterIdLow = 0x0000;
- CAN_FilterInitStructure.CAN_FilterMaskIdHigh = 0x0000;
- CAN_FilterInitStructure.CAN_FilterMaskIdLow = 0x0000;
- CAN_FilterInitStructure.CAN_FilterFIFOAssignment = CAN_Filter_FIFO0;
- CAN_FilterInitStructure.CAN_FilterActivation = ENABLE;
- CAN_FilterInit(&CAN_FilterInitStructure);
- }
2.3 CAN初始化的故障诊断
2.3.1 常见初始化错误及排查方法
在初始化CAN控制器时,可能会遇到多种错误,例如配置错误、时序问题或硬件故障。排查这些问题通常需要仔细检查初始化代码、硬件连接,以及使用调试工具查看运行时的状态。以下是常见初始化错误及排查方法的列表:
- 初始化代码错误:确保所有设置都遵循STM32的参考手册。
- 时序问题:使用示波器检查CAN总线上的信号,确保它们符合CAN协议规范。
- 硬件故障:检查CAN收发器是否正常工作,以及终端电阻是否正确连接。
2.3.2 诊断工具和软件调试技巧
使用诊断工具可以帮助开发人员快速定位CAN初始化中的问题。例如,ST提供的STMCAN Utility软件能够监视CAN总线上的消息,并且具有发送和接收消息的功能。此外,可以使用调试器的实时监控功能来检查CAN控制器的状态寄存器。以下是一些软件调试技巧:
- 利用调试器断点功能,逐行执行初始化代码,监视寄存器的变化。
- 观察CAN状态寄存器的内容,包括睡眠模式、错误状态等。
- 使用示波器监控CAN总线上的波形,确保信号质量和时序符合CAN协议规范。
通过结合硬件检查和软件调试,可以有效地诊断并解决CAN初始化过程中遇到的问题。
- # 3. STM32 CAN通信编程与应用
- CAN通信作为车载网络和工业自动化系统中最常使用的通信协议之一,其在微控制器编程中的实现是确保系统间高效可靠通信的关键。本章节将深入探讨STM32平台下的CAN通信编程和应用,从数据帧的发送接收,到滤波器配置、中断管理,再到高级特性如错误处理和网络同步机制。本章节会以代码示例、逻辑分析和参数说明的形式,深入解析STM32 CAN编程的核心要义。
- ## 3.1 CAN消息发送与接收
- ### 3.1.1 发送数据帧的编程方法
- 在STM32微控制器上实现CAN数据帧的发送,需要先初始化CAN控制器,然后通过编程将数据帧写入发送缓冲区。以下是基本的发送数据帧的编程步骤和代码示例:
- ```c
- /* CAN初始化结构体 */
- CAN_HandleTypeDef hcan;
- /* CAN滤波器初始化结构体 */
- CAN_FilterConfTypeDef sFilterConfig;
- /* 初始化CAN控制器

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
相关推荐

专栏目录
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
波士顿矩阵在技术项目中的实战运用:专家教你如何分析
STM32最小系统全攻略:从设计原理到性能优化的终极指南(附案例分析)
【电子设计秘籍】:LLC开关电源的计算模型与优化技巧(稀缺资源)
精确控制流水灯闪烁:单片机时钟管理秘籍
ClustalX与基因组学:处理大规模序列数据的必备工具
【VMWare存储配置终极详解】:如何选择与优化存储资源的策略
【空间权重矩阵构建】:莫兰指数分析基础与进阶操作
故障排查快车道:HDP直播软件的故障诊断与日志分析速成
【微头条AI扩写教程】:快速入门,AI扩写技巧的实战指南
【模型校准】:实际数据与Simulink线路阻抗模型的精准对接


专栏目录
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )