STM32单片机系统升级指南:版本迭代,持续优化性能
发布时间: 2024-07-01 22:48:56 阅读量: 87 订阅数: 51 

# 1. STM32单片机系统升级概述**
STM32单片机系统升级是指在不改变硬件的情况下,通过更新固件来提升系统性能、修复缺陷或添加新功能。升级过程涉及多个阶段,包括准备、规划、执行和维护。
升级过程的目的是改善系统的可靠性、稳定性和功能性。通过升级,可以解决系统中存在的bug,提高系统的性能,并引入新的特性,以满足不断变化的需求。
# 2. 升级准备与规划
### 2.1 升级目标和需求分析
**确定升级目标:**
* 提升系统性能和稳定性
* 添加新功能或扩展现有功能
* 满足行业标准或法规要求
* 解决已知问题或安全漏洞
**分析需求:**
* 识别需要升级的系统组件
* 评估升级对系统的影响
* 收集用户反馈和需求
* 确定升级优先级和时间表
### 2.2 版本管理和发布策略
**版本管理:**
* 使用版本控制系统(如 Git)管理代码和固件版本
* 建立清晰的版本命名和发布流程
* 跟踪变更历史和版本差异
**发布策略:**
* 制定分阶段发布计划,从测试环境逐步过渡到生产环境
* 考虑回滚策略,以应对潜在问题
* 提供明确的发布说明和文档
### 2.3 升级风险评估和应对措施
**风险评估:**
* 识别潜在的升级风险,如数据丢失、系统故障或安全漏洞
* 评估风险的严重性和可能性
* 制定风险应对计划
**应对措施:**
* 实施备份和恢复策略
* 进行彻底的测试和验证
* 准备应急计划,以应对意外情况
* 持续监控系统,并在发现问题时及时采取行动
#### 代码示例:风险评估清单
```python
def risk_assessment():
"""评估升级风险并制定应对措施"""
# 识别风险
risks = [
"数据丢失",
"系统故障",
"安全漏洞"
]
# 评估风险严重性和可能性
risk_matrix = {
"严重性": ["低", "中", "高"],
"可能性": ["低", "中", "高"]
}
# 制定应对措施
mitigations = {
"数据丢失": "备份和恢复策略",
"系统故障": "应急计划",
"安全漏洞": "定期安全更新"
}
# 输出风险评估清单
for risk in risks:
print(f"风险:{risk}")
print(f"严重性:{risk_matrix['严重性'][0]}")
print(f"可能性:{risk_matrix['可能性'][0]}")
print(f"应对措施:{mitigations[risk]}")
```
**逻辑分析:**
该代码块定义了一个 `risk_assessment` 函数,用于评估升级风险并制定应对措施。它通过识别风险、评估严重性和可能性,以及制定应对措施来实现这一点。
**参数说明:**
* `risks`:一个包含潜在风险的列表
* `risk_matrix`:一个字典,其中包含严重性和可能性的值
* `mitigations`:一个字典,其中包含风险的应对措施
#### mermaid流程图:升级流程
```mermaid
graph LR
subgraph 准备
A[需求分析] --> B[版本管理] --> C[风险评估]
end
subgraph 执行
D[固件更新] --> E[升级流程] --> F[验证和测试]
end
subgraph 后续
G[性能监控] --> H[故障排除] --> I[持续优化]
end
A --> D
C --> D
F --> G
H --> I
```
**逻辑分析:**
该流程图展示了 STM32 单片机系统升级流程。它分为三个阶段:准备、执行和后续。每个阶段包含多个步骤,这些步骤按顺序执行。
**流程步骤:**
* **准备:**
* 需求分析
* 版本管理
* 风险评估
* **执行:**
* 固件更新
* 升级流程
* 验证和测试
* **后续:**
* 性能监控
* 故障排除
* 持续优化
# 3.1 固件更新方法和工具
固件更新是 STM32 单片机系统升级过程中的关键步骤,涉及将新固件映像写入设备的非易失性存储器中。有几种不同的固件更新方法,每种方法都有其自身的优点和缺点。
#### 串口更新
串口更新是一种简单且常用的方法,它使用串口接口将固件映像传输到设备。此方法需要一个外部主机(例如 PC 或微控制器)来发送固件映像,并且设备必须具有串口接口。
```
// 串口更新代码示例
#include <stdio.h>
#include <stm32f4xx_hal.h>
int main(void)
{
// 初始化串口
UART_HandleTypeDef huart;
huart.Instance = USART1;
HAL_UA
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏以 STM32 单片机选型为核心,深入探讨了从需求分析到最佳方案确定的全流程。通过揭秘关键因素、提供选型指南、剖析常见误区,帮助读者精准选型,打造高效系统。专栏还全面解析了 STM32 单片机的性能、外设和开发环境,并提供了从编程实战到系统调试的实战指南。此外,还收录了丰富的应用案例,分享了系统设计、优化、安全、故障分析、移植、维护、升级、集成、测试和仿真等方面的专业知识,助力读者深入理解 STM32 单片机,提升系统开发效率和稳定性。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
深入浅出Java天气预报应用开发:零基础到项目框架搭建全攻略

# 摘要
Java作为一种流行的编程语言,在开发天气预报应用方面显示出强大的功能和灵活性。本文首先介绍了Java天气预报应用开发的基本概念和技术背景,随后深入探讨了Java基础语法和面向对象编程的核心理念,这些为实现天气预报应用提供了坚实的基础。接着,文章转向Java Web技术的应用,包括Servlet与JSP技术基础、前端技术集成和数据库交互技术。在
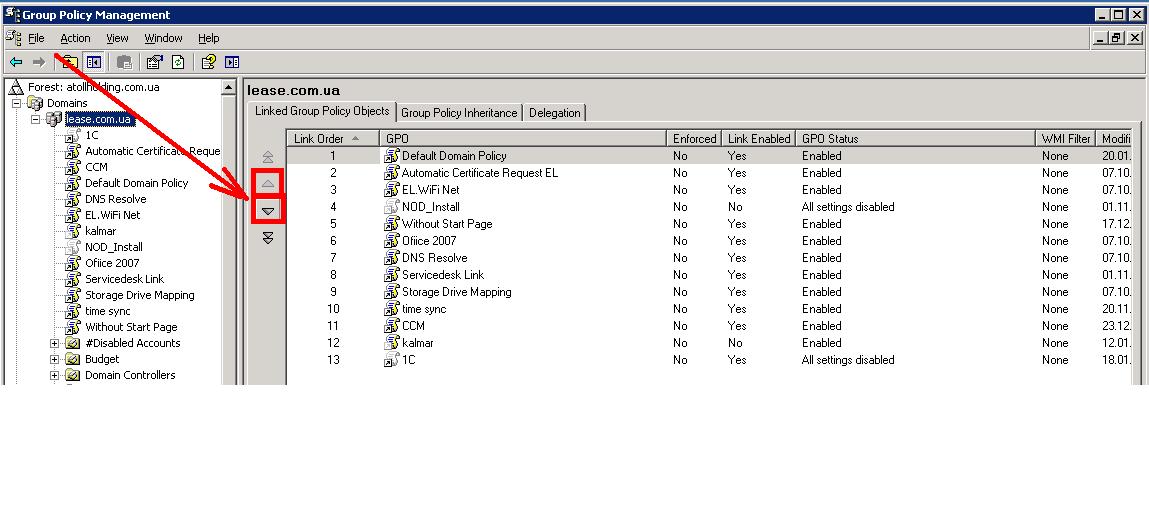
【GPO高级管理技巧】:提升域控制器策略的灵活性与效率
# 摘要
本论文全面介绍了组策略对象(GPO)的基本概念、策略设置、高级管理技巧、案例分析以及安全策略和自动化管理。GPO作为一种在Windows域环境中管理和应用策略的强大工具,广泛应用于用户配置、计算机配置、安全策略细化与管理、软件安装与维护。本文详细讲解了策略对象的链接与继承、WMI过滤器的使用以及GPO的版本控制与回滚策略,同时探讨了跨域策略同步、脚本增强策略灵活性以及故障排除与
高级CMOS电路设计:传输门创新应用的10个案例分析

# 摘要
本文全面介绍了CMOS电路设计基础,特别强调了传输门的结构、特性和在CMOS电路中的工作原理。文章深入探讨了传输门在高速数据传输、模拟开关应用、低功耗设计及特殊功能电路中的创新应用案例,以及设计优化面临的挑战,包括噪声抑制、热效应管理,以及传输门的可靠性分析。此外,本文展望了未来CMOS技术与传输门相结合的趋势,讨论了新型
计算机组成原理:指令集架构的演变与影响

# 摘要
本文综合论述了计算机组成原理及其与指令集架构的紧密关联。首先,介绍了指令集架构的基本概念、设计原则与分类,详细探讨了CISC、RISC架构特点及其在微架构和流水线技术方面的应用。接着,回顾了指令集架构的演变历程,比较了X86到X64的演进、RISC架构(如ARM、MIPS和PowerPC)的发展,以及SIMD指令集(例如AVX和NEON)的应用实例。文章进一步分析了指令集
KEPServerEX秘籍全集:掌握服务器配置与高级设置(最新版2018特性深度解析)
# 摘要
KEPServerEX作为一种广泛使用的工业通信服务器软件,为不同工业设备和应用程序之间的数据交换提供了强大的支持。本文从基础概述入手,详细介绍了KEPServerEX的安装流程和核心特性,包括实时数据采集与同步,以及对通讯协议和设备驱动的支持。接着,文章深入探讨了服务器的基本配置,安全性和性能优化的高级设
TSPL2批量打印与序列化大师课:自动化与效率的完美结合

# 摘要
TSPL2是一种广泛应用于打印和序列化领域的技术。本文从基础入门开始,详细探讨了TSPL2的批量打印技术、序列化技术以及自动化与效率提升技巧。通过分析TSPL2批量打印的原理与优势、打印命令与参数设置、脚本构建与调试等关键环节,本文旨在为读者提供深入理解和应用TSPL2技术的指
【3-8译码器构建秘籍】:零基础打造高效译码器

# 摘要
3-8译码器是一种广泛应用于数字逻辑电路中的电子组件,其功能是从三位二进制输入中解码出八种可能的输出状态。本文首先概述了3-8译码器的基本概念及其工作原理,并
EVCC协议源代码深度解析:Gridwiz代码优化与技巧
# 摘要
本文全面介绍了EVCC协议和Gridwiz代码的基础结构、设计模式、源代码优化技巧、实践应用分析以及进阶开发技巧。首先概述了EVCC协议和Gridwiz代码的基础知识,随后深入探讨了Gridwiz的架构设计、设计模式的应用、代码规范以及性能优化措施。在实践应用部分,文章分析了Gridwiz在不同场景下的应用和功能模块,提供了实际案例和故障诊断的详细讨论。此外,本文还探讨了
JFFS2源代码深度探究:数据结构与算法解析

# 摘要
JFFS2是一种广泛使用的闪存文件系统,设计用于嵌入式设备和固态存储。本文首先概述了JFFS2文件系统的基本概念和特点,然后深入分析其数据结构、关键算法、性能优化技术,并结合实际应用案例进行探讨。文中详细解读了JFFS2的节点类型、物理空间管理以及虚拟文件系统接口,阐述了其压
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )