STM32F103ZET6外设驱动开发
发布时间: 2024-12-17 01:03:03 阅读量: 6 订阅数: 11 

STM32F103ZET6芯片手册

参考资源链接:[STM32F103ZET6原理图](https://wenku.csdn.net/doc/646c29ead12cbe7ec3e3a640?spm=1055.2635.3001.10343)
# 1. STM32F103ZET6基础介绍
## 1.1 STM32F103ZET6概览
STM32F103ZET6是STMicroelectronics公司生产的一款高性能微控制器,属于Cortex-M3系列。该芯片集成了众多外设,如ADC、DAC、各种通信接口等,广泛应用于工业控制、医疗设备和消费电子等领域。其高性能的32位处理器核心、丰富的存储器和外设接口,使得STM32F103ZET6成为了嵌入式开发的理想选择。
## 1.2 核心特性
- **处理器核心**:基于ARM® Cortex®-M3 内核。
- **内存资源**:高达512 KB的闪存和64 KB的SRAM。
- **时钟系统**:内部8 MHz的RC振荡器,支持外部高速和低速时钟源,以及PLL时钟生成器。
- **电源管理**:多种电源工作模式,支持低功耗设计。
## 1.3 应用领域
STM32F103ZET6适用于多种应用场合,尤其在需要集成高性能处理能力、多种外设接口且对功耗有严格要求的场景下表现出色。例如,可应用于智能仪表、嵌入式控制系统、无人机、机器人技术以及物联网设备等。
通过本章的介绍,读者将对STM32F103ZET6有一个基本的了解,为后续深入学习其开发环境搭建、外设驱动开发以及高级应用打下坚实的基础。
# 2. 开发环境搭建与配置
### 2.1 STM32CubeMX工具使用
#### 2.1.1 配置外设参数
STM32CubeMX是一个图形化配置工具,能够帮助开发者快速配置STM32系列微控制器的外设参数。使用STM32CubeMX时,首先需要从ST官网下载并安装该软件。安装完成后,打开STM32CubeMX,创建一个新项目,选择对应的STM32F103ZET6微控制器型号。
在配置外设参数的过程中,用户可以直观地在图形化界面中选择需要配置的外设,并根据项目需求进行参数设置。例如,若需要配置一个SPI接口,首先需要选择SPI模块,然后指定SPI的通信模式(如主模式或从模式)、时钟极性和相位、波特率等参数。
接下来,可以配置GPIO相关的参数。对于每一个GPIO引脚,需要确定其功能:是否作为普通的输入/输出使用,或是配置为其他功能,比如UART的TX/RX、SPI的MISO/MOSI等。每种功能都有其特定的参数配置。
在参数配置完成后,STM32CubeMX可以生成初始化代码,代码会根据用户的配置生成相应的初始化函数和结构体,大大简化了开发流程。
```c
/* SPI1 init function */
void MX_SPI1_Init(void)
{
hspi1.Instance = SPI1;
hspi1.Init.Mode = SPI_MODE_MASTER;
hspi1.Init.Direction = SPI_DIRECTION_2LINES;
hspi1.Init.DataSize = SPI_DATASIZE_8BIT;
hspi1.Init.CLKPolarity = SPI_POLARITY_LOW;
hspi1.Init.CLKPhase = SPI_PHASE_1EDGE;
hspi1.Init.NSS = SPI_NSS_SOFT;
hspi1.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_16;
hspi1.Init.FirstBit = SPI_FIRSTBIT_MSB;
hspi1.Init.TIMode = SPI_TIMODE_DISABLE;
hspi1.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
hspi1.Init.CRCPolynomial = 7;
if (HAL_SPI_Init(&hspi1) != HAL_OK)
{
Error_Handler();
}
}
```
以上代码是通过STM32CubeMX生成的SPI1初始化函数,展示了如何配置SPI为master模式,并设定了一系列其他参数,如数据大小、时钟极性、时钟相位等。
#### 2.1.2 生成初始化代码
在完成了所有外设参数的配置之后,STM32CubeMX会提供一个代码生成选项。选择合适的项目文件夹以及工程名称,STM32CubeMX能够生成一个完整的工程框架,其中包含了所有外设的初始化代码。
生成的代码包括了HAL库相关的源文件和头文件,同时还有用于启动和配置每个外设的代码。开发者可以基于这些代码进一步开发应用程序逻辑。工程结构通常包括如下部分:
- `main.c`:包含main函数,是程序的入口点。
- `stm32f1xx_hal_msp.c`:包含了用于初始化硬件外设的函数。
- `stm32f1xx_it.c`:中断处理函数的存放处。
- `User/`:自定义代码存放目录,开发者可以在这里添加自己的文件。
- `Inc/`:头文件目录,包含了HAL库的头文件以及自定义头文件。
代码生成后,开发者还需要在Keil MDK等IDE中进行后续的配置和编写应用程序代码。
### 2.2 Keil MDK开发环境配置
#### 2.2.1 安装与环境设置
Keil MDK(Microcontroller Development Kit)是专为微控制器开发设计的集成开发环境(IDE),它支持ARM、Cortex-M等微控制器的开发。安装Keil MDK后,需要对开发环境进行基本的配置,以便与STM32F103ZET6微控制器兼容。
安装步骤通常包括:
- 下载并安装Keil uVision IDE。
- 启动Keil uVision,选择“Project”菜单下的“Manage Project Items”选项,创建一个新的项目。
- 在弹出的对话框中选择目标微控制器STM32F103ZET6,根据需要创建必要的源文件和头文件。
环境设置包括:
- 在“Options for Target”对话框中设置晶振频率,这对时钟系统的配置至关重要。
- 配置编译器和调试器的路径。
- 设置编译和链接选项,包括内存配置和堆栈大小等。
```c
// 示例:设置系统时钟源
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
// 配置PLL源时钟为外部高速时钟
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
// 配置系统时钟为PLL输出,并设置HCLK、PCLK1、PCLK2时钟分频器
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
```
这段代码展示了如何使用HAL库函数来配置系统时钟源和时钟分频器,以确保CPU及其他外设能够以正确的频率运行。
#### 2.2.2 链接器和编译器配置
在Keil MDK中配置链接器和编译器是确保项目能够正确编译和链接的关键步骤。这包括设置内存布局、优化选项、预处理器定义等。
- 在“Options for Target”对话框中切换到“Target”标签页,设置内存布局,确保RAM和ROM的起始地址与STM32F103ZET6的硬件规格相匹配。
- 在“C/C++”标签页中配置预处理器定义,比如定义宏常量,以便在代码中使用条件编译。
- 在“Linker”标签页中,设置代码和数据的链接策略,这包括指定输入文件和输出文件的格式,以及其他链接选项。
```makefile
# 示例:keil链接器脚本的一部分
LR_IROM1 0x08000000 0x00080000 { ; load region size_region
ER_IROM1 0x08000000 0x00080000 { ; load address = execution address
*.o (RESET, +First)
*(InRoot$$Sections)
.ANY (+RO)
}
RW_IRAM1 0x20000000 0x00010000 { ; RW data
.ANY (+RW +ZI)
}
}
```
该链接器脚本定义了代码和数据应该加载到STM32F103ZET6的内存中的具体位置。LR_IROM1是程序存储区,RW_IRAM1是可读写的RAM区域,它们都有特定的起始和结束地址。
### 2.3 调试工具和方法
#### 2.3.1 JTAG与SWD接口简介
调试是嵌入式开发过程中的一个重要环节。JTAG(Joint Test Action Group)和SWD(Serial Wire Debug)接口是两种常用的调试接口。
JTAG接口是一种并行接口,提供了一种标准的方法来访问微控制器内部的调试功能。它通过一个称为TDI(Test Data In)、TDO(Test Data Out)、TCK(Test Clock)、TMS(Test Mode Select)和TRST(Test Reset)的信号进行通信。
SWD接口是基于双线的串行通信接口,它使用两个信号线:SWDIO和SWCLK。SWD接口比JTAG接口更加节省引脚资源,并且在大多数情况下,SWD的通信速度要高于JTAG。
STMicroelectronics的开发板通常会提供SWD接口的调试器,如ST-Link。用户可以通过ST-Link连接开发板与电脑,并使用相应的调试工具(如ST-Link Utility或Keil MDK的调试器)进行调试。
#### 2.3.2 使用ST-Link进行调试
ST-Link是STMicroelectronics提供的调试工具,支持SWD和JTAG接口。它是连接STM32微控制器与电脑的桥梁,能够读取程序存储器、运行程序、设置断点、单步执行程序以及

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 STM32F103ZET6 微控制器的方方面面。从其原理图开始,我们将逐步揭开它的硬件秘密,包括其引脚功能、内存管理和整体架构。通过深入的分析和清晰的解释,我们将帮助您充分利用这款强大的微控制器,解锁其全部潜力。无论您是经验丰富的嵌入式系统开发人员还是刚刚开始使用 STM32F103ZET6,本专栏都将为您提供宝贵的见解和实用指南。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
Funcode坦克大战:事件驱动编程模式的C语言实现与图形用户界面(GUI)设计

# 摘要
本文全面探讨了在事件驱动编程模式下使用C语言实现的Funcode坦克大战游戏的开发过程。首先介绍了游戏的基本概念和C语言基础,随后深入讨论了游戏逻辑构建、事件处理机制和动态内存管理
【Arlequin数据清洗艺术】:打造无瑕数据集的12大技巧

# 摘要
本文全面阐述了Arlequin数据清洗的理论与实践应用。首先概述了数据清洗的重要性和基本步骤,强调了数据质量对分析的重要性以及数据清洗在业务决策中的作用。接着,深入探讨了Arlequin数据清洗的核心技术,包括与其它工具的比较、在不同领域的应用以及关键技术如数据分割、合并、转换和规范化。通过实际案例分析,展示了Arlequin在数据清洗前后的效果对比,并针对特定行业挑战提出了
掌握事务管理与数据库优化:蛋糕商城性能调优秘籍

# 摘要
本文详细介绍了数据库事务管理的基础知识,包括事务的ACID属性、隔离级别和并发控制机制,以及数据库查询优化技术和索引策略对性能提升的作用。通过对蛋糕商城的案例分析,本文展示了实际业务场景中应用性能调优的实践,包括性能瓶颈诊断、事务管理调整、查询与索引优化等。本文旨在为数据库管理员和开发人员提供一套完整的理论知识与实践经验,帮助他们更有效地管理和优化数据库性能。
# 关键字
数据库事务管理;ACID
信捷PLC XC系列软件编程:功能块与数据通讯的6项技巧
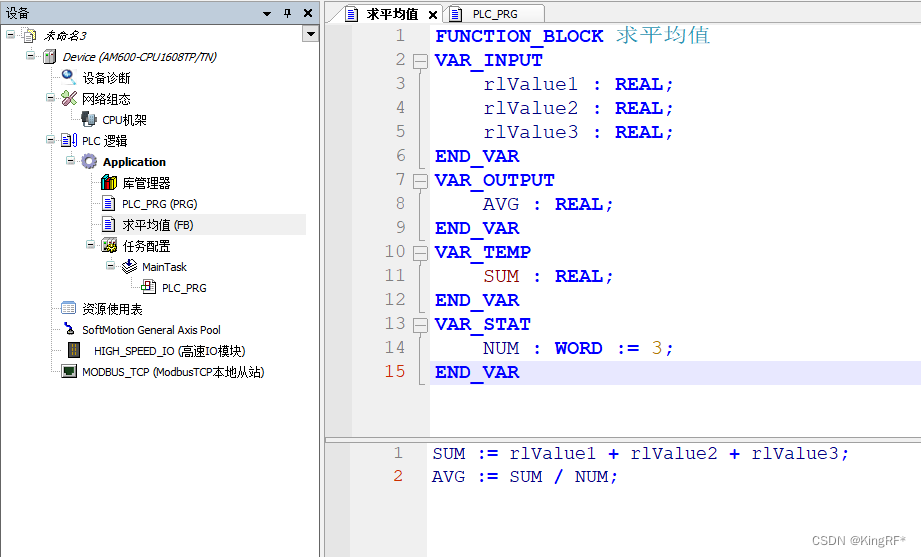
# 摘要
本文全面探讨了信捷PLC XC系列软件编程的核心概念、功能块的使用技巧、数据通讯机制及其在实际中的应用。通过对功能块的基础与高级应用的详细介绍,本文阐述了功能块的定义、分类、创建、管理以及在程序中的实际应用。同时,详细解析了数据通讯机制的原理、类型、配置以及高级应用策略。文章还探讨了功能块与数据通讯集成的技巧,并通过案例研究展示了在实际应用中问题的解决方法。最后,本文展望了新技术在PLC中
【杰理AC695N音频处理秘籍】:高品质音频解决方案揭秘
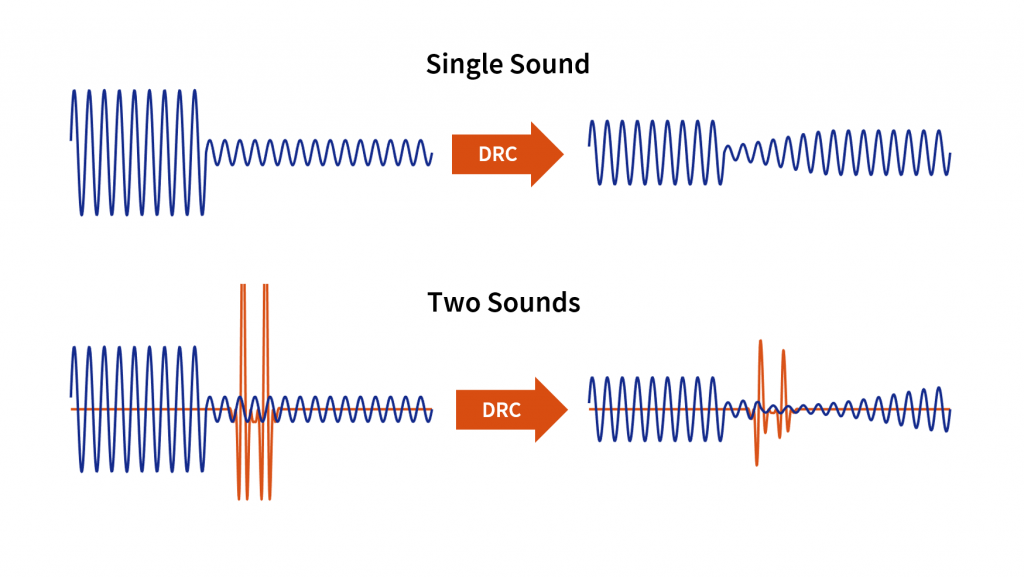
# 摘要
杰理AC695N音频处理器是一个在音频信号处理领域具有重要地位的芯片,它在现代音频设备中扮演着核心角色。本文首先对杰理AC695N音频处理器进行了全面的概述,并介绍了其硬件架构、软件开发环境以及音频处理应用案例。随后,深入探讨了音频处理的理论基础,包括数字信号处理原理、音频信号的增强技术、编码与解码技术,以及高级音频处理技巧,如实时分析与处
【动态状态管理】:用CSS控制复选框的选中与未选中效果

# 摘要
随着Web界面的动态性和交互性日益增强,CSS在动态状态管理中的作用变得愈发重要。本文深入探讨了CSS在复选框选择器的应用,展示了如何利用CSS属性和伪类控制复选框的视觉状态,以及如何通过JavaScript实现状态的动态控制和管理。文章还讨论了跨浏览器兼容性和性能优化的策略,并展望了CSS预
Adex meter AE1152D 编程接口深度剖析:自动化测量的新境界

# 摘要
本文详细介绍了Adex meter AE1152D的编程接口,涵盖了其基础理论、实践应用以及进阶功能开发。首先,概述了编程接口的功能与结构、支持的编程语言以及通信协议,并提供了接口的初始化与配置指南。接着,通过具体实践案例,探讨了数据读取写入操作、错误处理和日志记录,并分享了自动化测试与数据分析的高级应用。此
【Transmate高级使用教程】:Cat软件复杂数据结构转换的艺术
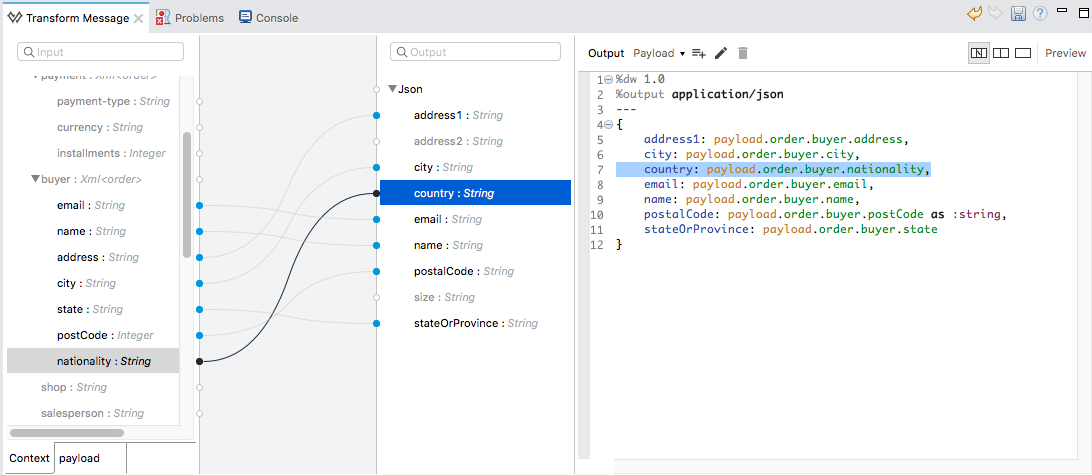
# 摘要
Cat软件作为数据转换领域的创新工具,已成为处理各种数据结构转换的首选解决方案。本文全面解析了Cat软件的核心功能、性能优化以及安全性策略,并深入探讨了其在处理复杂数据结构转换中的实用技巧。同时,本文还分析了Cat软件在多个行业中的实际应用案例,展示了其在项目管理与自定义扩展方面的能力。此外,文章也展望了Cat软件的未来发展,以及行业趋势如何影响其功
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )