单片机语言程序设计进阶攻略:15个技巧提升你的编程水平
发布时间: 2024-07-09 10:09:05 阅读量: 65 订阅数: 23 

【单片机开发思想进阶02:单个定时器实现多路并行非阻塞定时功能】

# 1. 单片机语言程序设计基础
单片机语言程序设计是嵌入式系统开发的基础,它涉及单片机硬件架构、指令集、数据类型、流程控制和函数等基本概念。本章将介绍单片机语言程序设计的核心知识,为后续的深入学习奠定基础。
### 1.1 单片机硬件架构
单片机是一种集成在单个芯片上的微型计算机,它主要由CPU、存储器、I/O接口和外围设备组成。CPU负责执行指令,存储器用于存储程序和数据,I/O接口用于与外部设备通信,外围设备提供各种功能,如定时器、计数器和通信接口。了解单片机的硬件架构对于理解程序设计至关重要。
### 1.2 指令集
指令集是单片机CPU执行的指令集合。每种单片机都有自己的指令集,它定义了CPU可以执行的操作,如算术运算、逻辑运算、数据传输和分支跳转。掌握指令集是编写单片机程序的基础。
# 2. 单片机语言程序设计技巧
### 2.1 数据类型和变量的使用
#### 2.1.1 数据类型的选择和应用
数据类型是单片机语言中用于表示数据的类型,选择合适的数据类型对于优化代码性能和内存使用至关重要。常见的单片机语言数据类型包括:
- 整数类型:int、short、long等,用于存储整数。
- 浮点数类型:float、double等,用于存储浮点数。
- 字符类型:char、wchar_t等,用于存储单个字符。
- 布尔类型:bool,用于存储真或假。
在选择数据类型时,需要考虑以下因素:
- 数据范围:确保数据类型能够表示数据的最大和最小值。
- 内存占用:选择较小的数据类型以节省内存空间。
- 运算效率:不同数据类型的运算效率不同,应根据需要选择合适的类型。
#### 2.1.2 变量的声明和初始化
变量是用于存储数据的命名内存位置。在单片机语言中,变量需要在使用前进行声明和初始化。
声明变量的语法如下:
```
<数据类型> <变量名>;
```
例如:
```
int count;
float temperature;
```
初始化变量可以为其分配初始值,语法如下:
```
<数据类型> <变量名> = <初始值>;
```
例如:
```
int count = 0;
float temperature = 25.0;
```
### 2.2 流程控制语句
流程控制语句用于控制程序执行的流程,包括条件语句、循环语句和跳转语句。
#### 2.2.1 条件语句
条件语句根据条件执行不同的代码块,语法如下:
```
if (<条件>) {
// 条件为真时执行的代码块
} else {
// 条件为假时执行的代码块
}
```
例如:
```
if (temperature > 30) {
// 执行高温处理代码
} else {
// 执行正常温度处理代码
}
```
#### 2.2.2 循环语句
循环语句用于重复执行一段代码,语法如下:
- **for循环**:用于已知循环次数的循环。
```
for (<初始化>; <条件>; <步长>) {
// 循环体
}
```
- **while循环**:用于条件满足时重复执行循环。
```
while (<条件>) {
// 循环体
}
```
- **do-while循环**:用于至少执行一次循环,然后根据条件继续执行。
```
do {
// 循环体
} while (<条件>);
```
#### 2.2.3 跳转语句
跳转语句用于改变程序执行流程,语法如下:
- **goto语句**:无条件跳转到指定标签。
```
goto <标签>;
```
- **break语句**:退出当前循环或switch语句。
```
break;
```
- **continue语句**:跳过当前循环的剩余部分,继续执行下一轮循环。
```
continue;
```
### 2.3 函数和中断
#### 2.3.1 函数的定义和调用
函数是将代码块封装成可重用模块的方法,语法如下:
```
<返回类型> <函数名>(<参数列表>) {
// 函数体
}
```
例如:
```
int add(int a, int b) {
return a + b;
}
```
函数可以通过其名称和参数列表进行调用,例如:
```
int result = add(10, 20);
```
#### 2.3.2 中断的处理和响应
中断是单片机对外部事件的响应机制。当发生中断时,程序执行流程会暂时中断,转而执行中断服务程序(ISR)。
ISR负责处理中断事件,然后将程序执行流程恢复到中断发生前的状态。
中断处理的流程如下:
1. **中断请求**:外部事件触发中断请求。
2. **中断响应**:单片机暂停当前执行的程序,进入中断处理模式。
3. **ISR执行**:执行ISR,处理中断事件。
4. **中断返回**:ISR执行完毕,程序执行流程恢复到中断发生前的状态。
# 3.1 输入/输出操作
#### 3.1.1 GPIO的配置和使用
GPIO(通用输入/输出)引脚是单片机与外部设备交互的重要接口。在单片机语言程序设计中,对GPIO的配置和使用至关重要。
**GPIO配置**
GPIO引脚的配置通常涉及以下步骤:
- **引脚选择:**确定要使用的GPIO引脚。
- **方向设置:**将引脚配置为输入或输出。
- **模式设置:**设置引脚的电气特性,如推挽输出、开漏输出或输入模式。
- **上拉/下拉电阻:**为输入引脚启用上拉或下拉电阻,以提供默认电平。
**GPIO使用**
配置好GPIO引脚后,即可通过软件对其进行读写操作。
- **输入:**从输入引脚读取电平,确定外部设备的状态。
- **输出:**向输出引脚写入电平,控制外部设备的行为。
**代码示例:**
```c
// GPIO初始化
void GPIO_Init(void)
{
// 配置GPIOA的第0位为输出模式
RCC->AHB1ENR |= RCC_AHB1ENR_GPIOAEN;
GPIOA->MODER &= ~GPIO_MODER_MODE0;
GPIOA->MODER |= GPIO_MODER_MODE0_0;
// 配置GPIOB的第1位为输入模式
RCC->AHB1ENR |= RCC_AHB1ENR_GPIOBEN;
GPIOB->MODER &= ~GPIO_MODER_MODE1;
GPIOB->PUPDR |= GPIO_PUPDR_PUPD1_0; // 上拉电阻
}
// 读取GPIOB的第1位电平
uint8_t GPIO_Read(void)
{
return (GPIOB->IDR & GPIO_IDR_ID1) != 0;
}
// 向GPIOA的第0位写入高电平
void GPIO_Write(void)
{
GPIOA->ODR |= GPIO_ODR_OD0;
}
```
**逻辑分析:**
- `GPIO_Init()`函数初始化GPIOA的第0位为输出模式,GPIOB的第1位为输入模式并启用上拉电阻。
- `GPIO_Read()`函数读取GPIOB的第1位电平,返回1表示高电平,0表示低电平。
- `GPIO_Write()`函数向GPIOA的第0位写入高电平。
#### 3.1.2 ADC和DAC的应用
ADC(模数转换器)和DAC(数模转换器)是单片机与模拟信号交互的重要外设。
**ADC应用**
ADC用于将模拟信号(如电压、电流)转换为数字信号,以便单片机处理。
- **配置:**设置ADC的采样率、分辨率、触发方式等参数。
- **启动转换:**启动ADC转换过程。
- **读取结果:**读取ADC转换后的数字信号。
**DAC应用**
DAC用于将数字信号转换为模拟信号,以便单片机控制外部设备。
- **配置:**设置DAC的分辨率、输出范围等参数。
- **写入数据:**向DAC写入数字信号,生成相应的模拟信号。
**代码示例:**
```c
// ADC初始化
void ADC_Init(void)
{
// 配置ADC时钟
RCC->APB2ENR |= RCC_APB2ENR_ADC1EN;
// 配置ADC通道
ADC1->CHSELR |= ADC_CHSELR_CH1;
// 配置ADC采样率
ADC1->SMPR2 |= ADC_SMPR2_SMP1_0 | ADC_SMPR2_SMP1_1 | ADC_SMPR2_SMP1_2;
}
// 启动ADC转换
void ADC_Start(void)
{
ADC1->CR2 |= ADC_CR2_ADON;
ADC1->CR2 |= ADC_CR2_SWSTART;
}
// 读取ADC转换结果
uint16_t ADC_Read(void)
{
return ADC1->DR;
}
// DAC初始化
void DAC_Init(void)
{
// 配置DAC时钟
RCC->APB1ENR |= RCC_APB1ENR_DACEN;
// 配置DAC通道
DAC->CR |= DAC_CR_EN1;
}
// 向DAC写入数据
void DAC_Write(uint16_t data)
{
DAC->DHR12R1 = data;
}
```
**逻辑分析:**
- `ADC_Init()`函数初始化ADC时钟、配置ADC通道和采样率。
- `ADC_Start()`函数启动ADC转换。
- `ADC_Read()`函数读取ADC转换后的数字信号。
- `DAC_Init()`函数初始化DAC时钟和配置DAC通道。
- `DAC_Write()`函数向DAC写入数字信号,生成相应的模拟信号。
# 4. 单片机语言程序设计进阶
### 4.1 嵌入式操作系统
#### 4.1.1 RTOS的基本概念和应用
**RTOS(实时操作系统)**是一种专门为嵌入式系统设计的操作系统,它提供了任务调度、同步、通信等基本功能,可以帮助开发者构建实时、可靠的嵌入式系统。
RTOS的主要特点包括:
- **实时性:**RTOS可以保证任务在规定的时间内执行,满足嵌入式系统的实时性要求。
- **多任务:**RTOS支持同时运行多个任务,提高系统的并行性和效率。
- **资源管理:**RTOS提供内存、外设等资源的管理机制,确保系统资源的合理分配和使用。
常见的RTOS包括FreeRTOS、μC/OS、ThreadX等。
#### 4.1.2 FreeRTOS的移植和使用
FreeRTOS是一个开源、免费的RTOS,它具有体积小、易于移植、功能丰富的特点,广泛应用于嵌入式系统开发。
FreeRTOS的移植步骤如下:
1. **配置移植文件:**修改FreeRTOS的移植文件(port.c和portmacro.h),以适配目标单片机平台。
2. **创建任务:**创建任务函数,并在任务函数中编写具体的功能逻辑。
3. **调度任务:**调用FreeRTOS的调度函数,启动任务调度。
代码示例:
```c
#include "FreeRTOS.h"
#include "task.h"
void task1(void *pvParameters) {
while (1) {
// 执行任务1的逻辑
}
}
void task2(void *pvParameters) {
while (1) {
// 执行任务2的逻辑
}
}
int main(void) {
// 创建任务1
xTaskCreate(task1, "Task1", 128, NULL, 1, NULL);
// 创建任务2
xTaskCreate(task2, "Task2", 128, NULL, 1, NULL);
// 启动任务调度
vTaskStartScheduler();
return 0;
}
```
### 4.2 实时时钟和日历
#### 4.2.1 实时时钟的配置和使用
**实时时钟(RTC)**是一种能够保持准确时间信息的硬件模块,它可以为嵌入式系统提供时间和日期信息。
RTC的配置和使用步骤如下:
1. **配置RTC外设:**根据单片机型号,配置RTC外设的寄存器,设置时钟频率、时区等参数。
2. **设置时间和日期:**通过写入RTC寄存器,设置当前时间和日期。
3. **读取时间和日期:**通过读取RTC寄存器,获取当前时间和日期。
代码示例:
```c
#include "stm32f10x.h"
void RTC_Config(void) {
// 使能RTC时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR | RCC_APB1Periph_BKP, ENABLE);
// 使能备份域写保护
PWR_BackupAccessCmd(ENABLE);
// 重置备份域
BKP_DeInit();
// 设置RTC时钟源为LSI
RCC_RTCCLKConfig(RCC_RTCCLKSource_LSI);
// 使能RTC
RCC_RTCCLKCmd(ENABLE);
// 设置RTC预分频器
RTC_SetPrescaler(32767);
// 设置RTC时钟
RTC_SetCounter(0);
}
void RTC_SetTime(uint8_t hour, uint8_t minute, uint8_t second) {
// 设置小时
RTC_SetHourFormat(RTC_HourFormat_24);
RTC_SetHours(hour);
// 设置分钟
RTC_SetMinutes(minute);
// 设置秒钟
RTC_SetSeconds(second);
}
uint32_t RTC_GetTime(void) {
// 获取小时
uint8_t hour = RTC_GetHours();
// 获取分钟
uint8_t minute = RTC_GetMinutes();
// 获取秒钟
uint8_t second = RTC_GetSeconds();
// 返回时间戳
return (hour << 16) | (minute << 8) | second;
}
```
#### 4.2.2 日历的实现和应用
**日历**是一种记录日期和时间的系统,它可以帮助嵌入式系统进行日期和时间相关的计算和操作。
日历的实现步骤如下:
1. **定义日期结构:**定义一个结构体,用于存储日期信息(年、月、日)。
2. **日期转换:**编写函数,将日期从一种格式(如Unix时间戳)转换为另一种格式(如年月日)。
3. **日期计算:**编写函数,进行日期相关的计算,如加减天数、获取星期几等。
代码示例:
```c
typedef struct {
uint16_t year;
uint8_t month;
uint8_t day;
} Date;
uint32_t DateToUnixTimestamp(Date date) {
// 计算天数
uint32_t days = 0;
for (uint16_t y = 1970; y < date.year; y++) {
days += 365;
if (y % 4 == 0 && (y % 100 != 0 || y % 400 == 0)) {
days++;
}
}
for (uint8_t m = 1; m < date.month; m++) {
days += 31;
if (m == 2 && date.year % 4 == 0 && (date.year % 100 != 0 || date.year % 400 == 0)) {
days++;
}
}
days += date.day - 1;
// 计算秒数
uint32_t seconds = days * 86400;
return seconds;
}
```
### 4.3 数据存储和管理
#### 4.3.1 EEPROM和Flash的特性和应用
**EEPROM(电可擦除可编程只读存储器)**和**Flash**是两种非易失性存储器,它们可以存储数据,即使在断电后也能保持数据。
| 特性 | EEPROM | Flash |
|---|---|---|
| 擦除方式 | 按字节擦除 | 按扇区擦除 |
| 擦除次数 | 100,000次 | 100,000次 |
| 写入速度 | 慢 | 快 |
| 容量 | 小 | 大 |
EEPROM常用于存储少量的数据,如配置参数、校准数据等。Flash常用于存储大容量的数据,如程序代码、文件系统等。
#### 4.3.2 文件系统的使用和管理
**文件系统**是一种组织和管理存储数据的系统,它提供了文件和目录的概念,方便用户访问和管理数据。
常见的嵌入式文件系统包括FAT、FAT32、exFAT等。
文件系统的使用和管理步骤如下:
1. **格式化存储介质:**使用文件系统工具格式化存储介质(如SD卡、U盘),创建文件系统。
2. **挂载文件系统:**将文件系统挂载到一个目录,使其可以在系统中访问。
3. **创建文件和目录:**使用文件系统API创建文件和目录,组织数据。
4. **读写文件:**使用文件系统API读写文件,存储和获取数据。
代码示例:
```c
#include "ff.h"
FATFS fs;
FIL file;
int main(void) {
// 格式化SD卡
f_mkfs("sdcard:", 0, 0);
// 挂载文件系统
f_mount(&fs, "sdcard:", 1);
// 创建文件
f_open(&file, "test.txt", FA_CREATE_NEW | FA_WRITE);
// 写入数据
f_write(&file, "Hello world!", 12, NULL);
// 关闭文件
f_close(&file);
// 读出数据
f_open(&file, "test.txt", FA_READ);
char buffer[128];
f_read(&file, buffer, 128, NULL);
// 关闭文件
f_close(&file);
// 卸载文件系统
f_mount(NULL, "sdcard:", 0);
return 0;
}
```
# 5. 单片机语言程序设计项目实战
### 5.1 智能家居控制系统
**5.1.1 系统架构和设计**
智能家居控制系统是一个基于单片机的分布式控制系统,其架构通常包括:
- **中央控制单元:**负责系统控制、数据处理和通信。
- **传感器节点:**采集环境数据,如温度、湿度、光照等。
- **执行器节点:**根据控制指令执行动作,如控制灯具、电器等。
**5.1.2 传感器和执行器的集成**
传感器和执行器是智能家居控制系统中至关重要的组件。常用的传感器包括:
- **温度传感器:**测量环境温度。
- **湿度传感器:**测量环境湿度。
- **光照传感器:**测量环境光照强度。
常用的执行器包括:
- **继电器:**控制高压电器。
- **晶体管:**控制低压电器。
- **电机驱动器:**控制电机。
传感器和执行器的集成可以通过以下方式实现:
- **直接连接:**传感器和执行器直接与单片机相连。
- **总线连接:**传感器和执行器通过总线(如I2C、SPI)与单片机相连。
- **无线连接:**传感器和执行器通过无线通信协议(如Zigbee、Wi-Fi)与单片机相连。
### 5.2 工业控制系统
**5.2.1 过程控制的原理和实现**
过程控制是工业控制系统中的核心技术,其原理是通过测量、分析和调整被控对象的输入和输出,使被控对象达到预期的状态。
过程控制的实现通常采用以下步骤:
1. **测量:**使用传感器测量被控对象的输入和输出。
2. **分析:**将测量数据与预期的状态进行比较,计算偏差。
3. **调整:**根据偏差调整被控对象的输入,使偏差减小。
**5.2.2 PID算法的应用和调优**
PID(比例-积分-微分)算法是过程控制中常用的控制算法。PID算法通过计算偏差的比例、积分和微分,生成控制信号,调整被控对象的输入。
PID算法的调优是通过调整比例、积分和微分系数来实现的。调优的目标是使系统响应快速、稳定,且无过冲或欠冲。
PID算法的调优方法有多种,常用的方法包括:
- **Ziegler-Nichols法:**根据被控对象的阶跃响应,计算PID系数。
- **Cohen-Coon法:**根据被控对象的传递函数,计算PID系数。
- **经验法:**根据经验和试错,调整PID系数。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
欢迎来到单片机语言程序设计专栏,在这里,您将踏上探索单片机编程世界的精彩旅程。本专栏汇集了丰富的文章,涵盖了单片机语言程序设计的方方面面,从性能优化秘诀到常见问题解决方案,再到实战技巧和项目经验分享。深入了解中断处理、串口通信、定时器应用、ADC和DAC的使用,以及嵌入式系统开发的实战指南。此外,您还将了解单片机语言与其他编程语言的比较,获取学习资源和社区信息,避免常见的误区和陷阱,掌握调试和故障排除技巧,学习代码重用和模块化设计,以及软件架构和设计模式。本专栏旨在为您提供全面的知识和实践指导,助您成为一名出色的单片机程序员。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【JOSEPH环算法揭秘】:数据结构课程设计中的20个核心案例与技巧
# 摘要
JOSEPH环算法是一种经典的计算机科学问题,涉及到环形链表的数据结构及其实现原理。本文从理论基础入手,详细阐述了JOSEPH环的工作机制和数学模型,并对其变种进行了分析比较。通过多个实践案例,展示了JOSEPH环算法解决实际问题的能力,并探讨了动态场景下的应用。本文进一步对JOSEPH环算法的性能进行深入
【Wi-Fi日志抓取的必备技能】:Xcode下的iOS网络调试日志获取全攻略
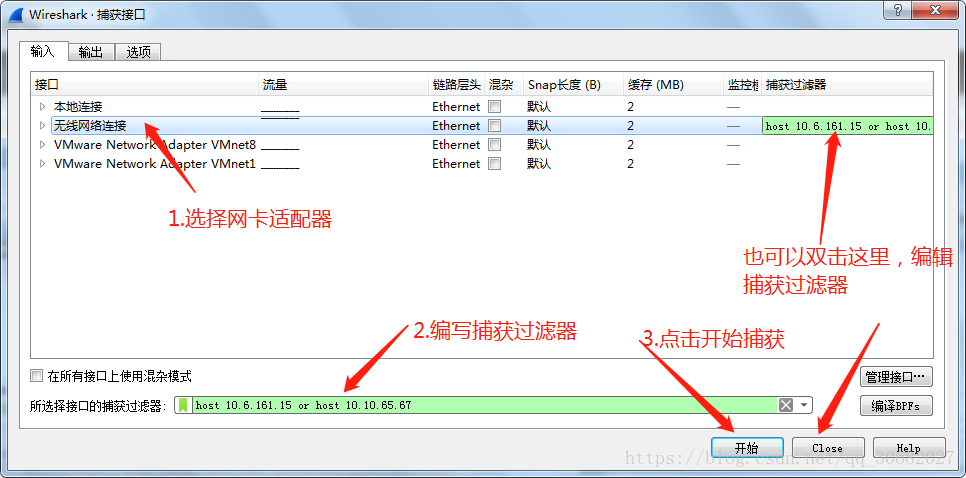
# 摘要
随着移动应用的日益普及,iOS平台上的网络调试成为开发者在软件开发过程中不可或缺的一部分。本文从iOS网络调试的概览入手,深入探讨了如何配置Xcode环境以及利用系统日志和网络
【裸机移植emWin】:5大策略实现无操作系统下的图形界面
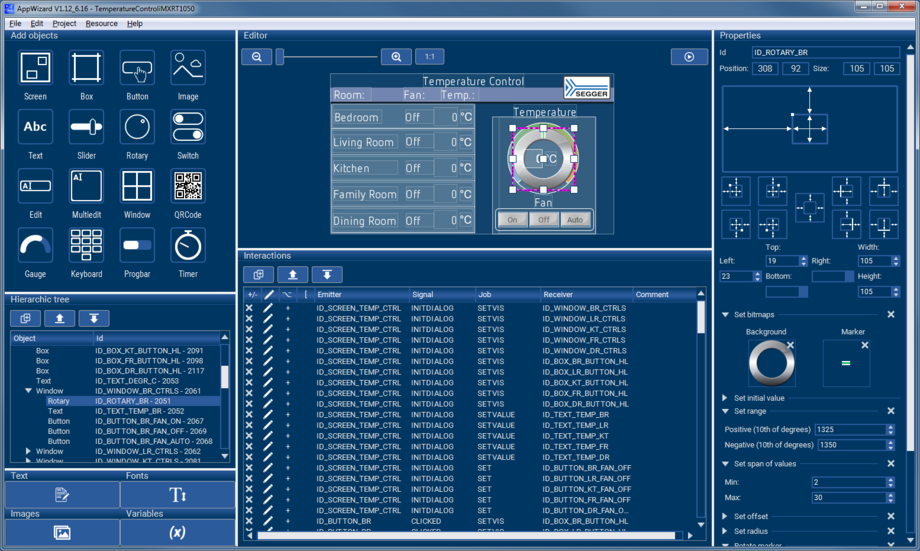
# 摘要
随着嵌入式系统的广泛应用,裸机环境下的图形界面开发成为提升用户体验的关键技术之一。本文首先介绍了裸机环境与图形界面的基础知识,并深入探讨了emWin图形库的核心概念、架构特点和资源管理机制。接着,针对裸机移植策略与实现,文章详细分析了硬件平台的选择、内存和存储管理,以及移植过程中的优化。在此基础上,本文进一步讨论了图形界面设计与优化的多个方面,包
AE Cesar1310射频电源故障排查速成:掌握解决常见问题的技巧

# 摘要
本文介绍了AE Cesar1310射频电源的基础知识和操作细节,包括其工作原理、常见故障类型及其原因,并详细阐述了故障诊断与排查的技巧和方法。文章重点探讨了日常维护和预防性故障排查的重要性,提供了维护要点和预防策略,同时通过实际案例分析展示了故障分析和处理过程。最后,本文列出了常用的故障排查工具和资源,旨在帮助技术操作人员提高射频电源的运行稳定性和故障处理能力。
# 关键字
射频电源;故
设备驱动开发入门:搭建Momentics IDE环境与基础流程
# 摘要
本文全面介绍了设备驱动开发的基础知识与实践技巧,涵盖了从Momentics IDE开发环境的搭建到设备驱动基础编程的各个方面。文章详细讲解了设备驱动架构、内存管理、主要功能实现以及驱动程序测试与调试的策略。同时,本文深入探讨了驱动开发中的高级主题,如中断处理、任务调度、安全性和并发控制,以及性能优化的方法。最后,文章展望了驱动开发在物联网领域中的应用前景以及
ICEM网格编辑:6大常见问题及解决方案
# 摘要
ICEM网格编辑是计算流体动力学(CFD)领域中用于构建高质量模拟网格的关键技术。本文首先概述了ICEM网格编辑的基本概念和理论基础,随后深入分析了网格编辑中常见的质量问题及其成因,并提供了对齐问题的识别方法与解决方案。文章进一步探讨了网格划分策略和高级操作技巧,包括编辑工具使用、网格生成与修正、以及优化与检查方法。在实践应用方面,本文讨论了在复杂几何模型、流体动力学模拟和多物理场耦合问题中网格编辑的重要性。最后,文章展望了自适应网格技术、多域网格编辑技术以及网格编辑技术的未来发展方向,包括与云计算和人工智能的结合。
# 关键字
ICEM网格编辑;网格质量问题;对齐技术;网格划分;
【PCIe 3.0电源管理】:高效能源管理策略与实践
# 摘要
本文全面探讨了PCIe 3.0的电源管理机制,涵盖硬件设计实践与软件层面的策略实施。首先,介绍了PCIe总线架构和电源规范,探讨了电源管理理论基础,包括电源状态管理和节能技术。接着,文章深入分析了硬件设计中电源优化的具体实践,如热设计和冷却技术,以及成功案例和故障分析。在软件层面,文章讨论了软件驱动和操作系统接口中的电源管理,以及动态电源管理算法的实现和性能评估。最后,本文展望了PCIe新标准对电源管理的影响,以及创新技术在电源管理中的应用前景,提出了持续改进与维护的必要性。
# 关键字
PCIe 3.0;电源管理;硬件优化;热设计;软件驱动;节能技术
参考资源链接:[PCI 3
【截词符使用误区全攻略】:避免性能下降的8个技巧

# 摘要
截词符是信息检索领域中用于增强搜索灵活性的重要工具,其基本概念与功能是允许用户在不完全明确查询项时进行搜索。
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )