数据聚类高效率:DBSCAN参数调优技巧,轻松提升聚类准确性
发布时间: 2024-12-28 00:44:36 阅读量: 7 订阅数: 7 

基于MDT重叠覆盖度数据的KNN-DBSCAN参数自适应调优研究.docx
# 摘要
数据聚类是数据挖掘的重要分支,其中DBSCAN算法以其无需指定簇数量和能够识别任意形状簇的特点而备受关注。本文首先概述了数据聚类与DBSCAN算法的基本概念,阐述了其理论基础、数学原理和参数选择对聚类效果的影响。随后,文章详细探讨了DBSCAN参数优化、实践技巧以及高维数据和大数据环境下的应用挑战。通过案例分析,本文展示了如何调优DBSCAN以提高其在实际应用中的性能。最后,本文对DBSCAN与K-means等其他聚类算法进行了比较,提出了根据具体需求选择合适聚类算法的建议,并展望了聚类算法的未来发展趋势。
# 关键字
数据聚类;DBSCAN算法;参数优化;高维数据;大数据;聚类效果评估
参考资源链接:[DBSCAN聚类算法详解:密度定义与核心边界噪声识别](https://wenku.csdn.net/doc/xdjqbdgpfx?spm=1055.2635.3001.10343)
# 1. 数据聚类与DBSCAN算法概述
数据聚类作为数据挖掘中的一项基础技术,目的是发现数据的内在结构,将相似的数据点分组到一起。DBSCAN(Density-Based Spatial Clustering of Applications with Noise)算法是一种基于密度的空间聚类方法,它可以发现任意形状的簇,同时具有识别噪声的能力。DBSCAN算法特别适用于大数据集,并且在数据集中的簇具有不同的密度时表现尤为出色。在大数据和数据科学的背景下,DBSCAN算法为聚类分析提供了有效的解决方案。接下来的章节将详细探讨DBSCAN的理论基础、参数选择、实际操作技巧,以及高级应用和算法比较。
# 2. DBSCAN算法基础与理论
### 2.1 数据聚类的基本概念
#### 2.1.1 聚类的目的与应用场景
数据聚类是一种无监督学习的方法,它将数据集中相似的对象组成一个簇,而将不相似的对象分到不同的簇中。聚类的目的是为了发现数据中的结构,使得簇内对象之间的相似度尽可能高,而簇间对象的相似度尽可能低。聚类的场景非常广泛,包括但不限于:
- 客户细分:在市场营销中,企业可以根据购买习惯、年龄、收入等因素将客户分成不同的群体,以便为不同群体制定差异化的营销策略。
- 图像分割:在计算机视觉领域,聚类算法可以用来识别图像中不同的区域或物体。
- 生物信息学:在基因表达数据分析中,聚类能够帮助科学家发现具有相似功能的基因群。
- 社交网络分析:通过对社交网络用户的行为模式进行聚类,可以识别社区结构或影响力中心。
#### 2.1.2 聚类算法的分类与发展
聚类算法按照不同的标准可以分为多种类型。按照定义的簇的形状分类,聚类算法可以分为基于原型的聚类(如K-means算法)、基于密度的聚类(如DBSCAN算法)和基于层次的聚类(如AGNES算法)。按照是否需要预先指定簇的数量,还可以分为硬聚类(每个数据点只属于一个簇)和软聚类(每个数据点属于多个簇的概率不同)。
聚类算法的发展经历了从简单到复杂的过程。早期的聚类算法如K-means因其简单高效而被广泛使用,但它们在处理复杂形状的簇或噪声点时存在局限。DBSCAN算法的出现标志着能够有效处理噪声和任意形状簇的聚类算法的研究进入了一个新阶段。目前,聚类算法的研究已经延伸到能够处理大数据量和高维数据的场景,如基于子空间聚类和基于图的聚类。
### 2.2 DBSCAN算法原理详解
#### 2.2.1 密度可达性和核心对象
DBSCAN算法的核心概念之一是“密度可达”。如果存在一个核心对象(即在给定邻域内包含足够多点的对象)和一系列直接密度可达对象,这些对象最终可以达到给定数据点,那么我们称这个数据点是从核心对象密度可达的。
为了定义核心对象,DBSCAN引入了两个参数:ε(Epsilon)和MinPts。ε代表邻域的半径,MinPts代表形成核心对象所需的最小点数。具体来说,如果一个点p的ε-邻域内至少包含MinPts个点(包括p自身),那么p就被视为一个核心对象。
#### 2.2.2 算法流程及参数作用
DBSCAN算法的流程基于密度可达性定义进行迭代,以识别所有的簇。算法流程可以概括如下:
1. 初始化:选择任意一个未被访问的数据点p。
2. 密度可达性检查:从p点开始,找出所有ε-邻域内的点,如果这些点的数量大于MinPts,则形成一个簇;否则,标记这些点为噪声。
3. 核心点连接:对于新找到的簇中的每个核心点,递归地应用步骤2,直到所有点都被访问过。
4. 重复以上过程,直到所有数据点都被访问。
参数ε和MinPts对于DBSCAN算法至关重要:
- ε决定了搜索邻域的大小,太小可能导致将本应属于同一簇的点分开,太大则可能导致簇的边界变得模糊。
- MinPts决定了形成核心对象所需的最低点数,值太小可能导致噪声被错误地包含在簇中,太大则可能导致无法找到足够多的核心对象。
### 2.3 DBSCAN的数学基础
#### 2.3.1 距离度量方法
DBSCAN算法依赖于距离度量来确定点之间的邻域关系。常见的距离度量方法包括欧几里得距离、曼哈顿距离、切比雪夫距离等。在高维空间中,选择合适距离度量对于算法的性能和结果的准确性具有重要影响。例如,当数据存在噪声或离群点时,马氏距离(Mahalanobis distance)可以用来衡量点之间的相似性。
#### 2.3.2 密度估计的数学模型
在DBSCAN算法中,密度估计是通过ε-邻域内点的数量来进行的。更精确的密度估计模型可以提高聚类的准确性和鲁棒性。例如,使用高斯核函数可以得到一种基于概率密度的密度估计,这种方法尤其适用于数据分布具有不确定性和模糊边界的情况。数学模型的选择要考虑到数据的特性和聚类任务的需求。
下一章节将深入探讨DBSCAN算法参数的选择与调整,以及它们对聚类结果的影响。
# 3. DBSCAN参数的作用与选择
DBSCAN聚类算法的成功应用在很大程度上取决于其参数的正确设置。在DBSCAN中,最关键的参数是ε(Epsilon)和MinPts(最小点数)。合适的参数选择可以有效地控制聚类的粒度,提取出有意义的模式,而参数选择不当可能会导致聚类效果不佳。这一章将深入探讨这两个参数的作用、选择方法,以及其他辅助参数的作用和优化策略。
## 3.1 参数ε(Epsilon)的确定方法
ε是一个半径参数,用于指定每个点的邻域的大小。这个参数直接关系到DBSCAN算法能否正确识别出核心对象、边界对象和噪声点。
### 3.1.1 k-distance图的解读
k-distance图是一种可视化工具,用于帮助我们选择合适的ε值。该图通过对数据集中的每个点绘制到第k个最近邻点的距离,并按照这些距离进行排序绘制。
```python
import numpy as np
import matplotlib.pyplot as plt
from sklearn.neighbors import NearestNeighbors
# 假设data是一个已经加载的numpy数组
neighbors = NearestNeighbors(n_neighbors=4) # 这里的4表示选择第4个最近邻点
neighbors_fit = neighbors.fit(data)
distances, indices = neighbors_fit.kneighbors(data)
# 绘制k-distance图
distances = np.sort(distances, axis=0)
distances = distances[:, 1]
plt.plot(distances)
plt.title('k-distance Plot')
plt.ylabel('Distance')
plt.xlabel('Data Points sorted by distance')
plt.show()
```
在k-distance图中,通常会寻找一个“膝盖”点,即图中距离突然开始增加的点。该点对应的横坐标值就是ε的合适选择。这样选择ε是因为它代表了数据密度从高到低的转折点。
### 3.1.2 ε选择的启发式规则
除了k-distance图之外,还有一些启发式规则可以帮助我们确定ε。例如,可以通过绘制一个邻域内的点数与半径大小的关系图,寻找一个点数急剧增加的位置,来大致估计ε。
```python
# 使用NearestNeighbors来辅助估计ε
k = 3 # 选择3个最近邻点进行实验
nn = NearestNeighbors(n_neighbors=k)
nn_fit = nn.fit(data)
distances, _ = nn_fit.kneighbors(data)
# 绘制距离与半径的关系图
radii = np.unique(distances[:, -1])
plt.plot(radii, data.shape[0] * np.ones_like(radii))
plt.plot(radii, np.sort(distances[:, -1], axis=0))
plt.title('Relationship between Radius and Number of Points')
plt.xlabel('Radius')
plt.ylabel('Number of Points')
plt.legend(['Number of points', 'Nearest Distance'])
plt.show()
```
## 3.2 参数MinPts(最小点数)的调整策略
MinPts定义了形成一个密度可达的最小点数,它影响着算法将哪些区域识别为密集区域的能力。如果MinPts设置得太小,算法可能会将噪声点错误地归入聚类;如果设置得太大,则可能无法识别出小的聚类。
### 3.2.1 点密度估计与MinPts的关系
点密度估计是理解MinPts作用的关键。在每个数据点周围,我们需要有足够的点来形成一个密集区域。通常,MinPts设置为数据的维度加一(d+1),即在d维空间中至少需要d+1个点才能构成一个密集区域。
### 3.2.2 MinPts对聚类结果的影响
通过实验不同大小的MinPts值,我们可以观察到聚类结果如何变化。如果MinPts设置得太小,可能会导致聚类过于分散,每个对象都可能成为自己的聚类;如果设置得太大,则可能会合并本应独立的聚类。
## 3.3 其他参数的考虑与优化
除了ε和MinPts,DBSCAN算法中还可能涉及距离度量方法的选择,以及性能优化的一些技巧。
### 3.3.1 距离度量方法的选择
DBSCAN算法默认使用欧氏距离作为相似性度量方法,但在某些情况下,曼哈顿距离、切比雪夫距离或者其他自定义度量可能更为适用。选择合适距离度量方法通常取决于数据的特性和业务需求。
### 3.3.2 算法性能优化技巧
DBSCAN算法在处理大数据集时可能会遇到性能瓶颈。一种常见的优化技巧是使用空间索引数据结构,如kd树、R树等,来加速最近邻搜索过程。另外,可以使用并行计算框架进行算法加速。
```python
# 示例:使用scikit-learn中的BallTree来加速DBSCAN
from sklearn.neighbors import BallTree
from sklearn.cluster import DBSCAN
# 建立BallTree索引
tree = BallTree(data, leaf_size=40, metric='euclidean')
# 使用BallTree的query方法加速最近邻查询
core_samples, labels = DBSCAN(eps=epsilon_value, min_samples=minpts_value,
metric='precomputed', algorithm='ball_tree',
leaf_size=40, n_jobs=-1).fit_predict(tree)
```
在上述代码中,leaf_size是BallTree的构建参数,n_jobs=-1允许算法使用所有可用的CPU核心进行并行计算。通过这种优化,DBSCAN算法的性能可以得到显著提升。
在本章中,我们深入探讨了DBSCAN参数的选择和优化方法。通过理解参数ε和MinPts的重要性,以及如何根据不同的场景调整这些参数,我们可以有效地提升DBSCAN算法的聚类效果。此外,我们还介绍了距离度量方法的选择和性能优化技巧,这些都是实现成功聚类的关键因素。在下一章中,我们将讨论DBSCAN在实际应用中的实践技巧和案例分析。
# 4. DBSCAN聚类实践技巧
## 4.1 数据预处理与特征选择
### 4.1.1 数据清洗的重要性
在进行DBSCAN聚类分析之前,数据预处理是不可忽视的一个重要步骤。数据清洗主要目的是去除数据中的噪声和不一致性,提高数据质量,以确保聚类结果的准确性和可靠性。
数据清洗通常包括以下几个方面:
- **缺失值处理**:检查数据集中的缺失值,并采取适当的方法填充或删除。常见的处理方式包括删除含有缺失值的记录、填充缺失值(如使用均值、中位数、众数或利用模型预测)。
- **异常值处理**:异常值可能会影响聚类效果,应该被识别并适当处理。异常值可以使用统计方法(如箱线图)检测,并采取删除、替换或归一化处理。
- **重复数据检查**:重复的数据记录可能导致分析结果偏差,应检查数据集中的重复记录,并进行删除。
### 4.1.2 特征提取与降维技术
特征提取和降维技术的目的是减少数据集的复杂度,同时保留重要的信息,这有助于提升聚类算法的效率和效果。
- **主成分分析(PCA)**:通过线性变换,将可能相关的多个变量转换为少数几个线性无关的变量(主成分),这些主成分能够解释原始数据大部分的方差。
- **t分布随机邻域嵌入(t-SNE)**:一种非线性降维技术,常用于高维数据的可视化。t-SNE能很好地保持局部结构,适合用于数据集的初步探索。
- **特征选择**:通过选择与目标变量关系密切的特征,剔除不相关或冗余特征,可以有效减少计算量,提升模型性能。
```python
from sklearn.decomposition import PCA
from sklearn.preprocessing import StandardScaler
from sklearn.impute import SimpleImputer
from sklearn.pipeline import Pipeline
# 数据清洗和预处理流程
def data_preprocessing(data):
# 数据标准化
scaler = StandardScaler()
scaled_data = scaler.fit_transform(data)
# 缺失值处理:使用均值填充
imputer = SimpleImputer(strategy='mean')
cleaned_data = imputer.fit_transform(scaled_data)
return cleaned_data
# 降维:PCA
pca = PCA(n_components=0.95) # 保留95%的方差信息
reduced_data = pca.fit_transform(data_preprocessing(X)) # X为原始数据集
# 特征提取后的数据可以直接用于DBSCAN聚类
```
在实际应用中,根据数据的具体情况,可能需要结合多种数据预处理技术和策略,来获得适合聚类分析的数据。
## 4.2 DBSCAN算法调优与案例分析
### 4.2.1 调优流程与策略
DBSCAN算法的关键在于参数ε(Epsilon)和MinPts(最小点数)的选取,这两个参数对于算法性能和聚类质量有决定性的影响。
- **ε的选取**:通常通过绘制k-distance图来帮助确定,k-distance图可以帮助我们识别数据密度变化的“肘部”位置,该位置对应的距离作为ε的值。
- **MinPts的选取**:取决于数据集的密度,通常一个经验规则是数据点的维度加1,或者通过实验确定最佳值。
调优策略可以总结为以下步骤:
1. 绘制k-distance图。
2. 确定ε值。
3. 选择一个合理的MinPts值。
4. 运行DBSCAN算法。
5. 根据聚类结果进行评估,必要时重复步骤2到4进行调整。
### 4.2.2 实际案例的应用与分析
为了更深入地理解DBSCAN参数调优,让我们通过一个实际案例进行分析。
假设我们有一个二维数据集,包含1000个数据点。我们的目标是将这些数据点根据其分布特性进行聚类。以下是应用DBSCAN算法前的数据预处理和参数选择流程:
1. 首先,我们进行数据清洗,移除缺失值和异常值。
2. 采用标准化方法对数据进行归一化处理。
3. 通过绘制k-distance图确定ε的值。
4. 在此基础上选择MinPts的值,开始初步的DBSCAN聚类分析。
5. 评估聚类结果,调整ε和MinPts参数,优化聚类效果。
```python
from sklearn.cluster import DBSCAN
import matplotlib.pyplot as plt
# 假设reduced_data为经过PCA降维后的数据
db = DBSCAN(eps=0.3, min_samples=10).fit(reduced_data)
labels = db.labels_
# k-distance图
distances = db.core_sample_distances_
plt.plot(distances, marker='o')
plt.xlabel('Data points sorted by distance')
plt.ylabel('Epsilon distance')
plt.show()
```
通过调整参数ε和MinPts,我们可以得到不同的聚类结果,并利用轮廓系数等评价指标对聚类效果进行评估。
## 4.3 聚类结果的评估与解释
### 4.3.1 聚类效果的评价指标
聚类效果的评价对于理解数据的分布和聚类的有效性至关重要。评价指标主要包括:
- **轮廓系数(Silhouette Coefficient)**:衡量聚类效果的指标,其值范围为[-1, 1]。值越大表示聚类效果越好。
- **Calinski-Harabasz指数**:一种聚类紧密度和分散度之间的比例度量,值越大表示聚类质量越好。
- **Davies-Bouldin指数**:基于类内和类间距离的聚类评价指标,其值越小表示聚类效果越好。
### 4.3.2 结果的业务理解和应用
在评估完聚类效果后,下一个步骤是将聚类结果转化为可理解的业务知识。聚类结果的解释应该根据业务场景和背景,进行合理的分析和解读。
例如,如果数据代表的是顾客购买行为,通过聚类可以识别出不同的顾客群体,进而为不同的群体设计个性化的营销策略。
```python
from sklearn.metrics import silhouette_score
# 假设labels为DBSCAN算法的聚类标签
silhouette_avg = silhouette_score(reduced_data, labels)
print('For n_clusters =', len(set(labels)), 'The average silhouette_score is :", silhouette_avg)
```
根据轮廓系数的值,我们可以判断当前聚类效果的好坏,并结合业务知识对聚类结果进行解释。
通过上述步骤,我们可以深入理解DBSCAN聚类实践技巧,为数据分析和业务决策提供科学依据。
# 5. DBSCAN高级应用与挑战
随着数据科学领域的发展,DBSCAN算法已经广泛应用在众多数据密集型的行业中。尽管其基础原理相对简单,但在面对更加复杂和庞大的数据集时,DBSCAN的应用和挑战也逐渐显现。本章节将深入探讨DBSCAN在高维数据、非欧氏空间和大数据环境中的高级应用,并揭示其面临的主要挑战。
## 5.1 高维数据的DBSCAN聚类
### 5.1.1 高维空间的聚类难题
在处理具有许多特征的高维数据时,DBSCAN面临“维度的诅咒”。高维空间中数据点的分布变得稀疏,相同密度的区域内可能只包含很少的数据点,导致核心点难以识别,进而使得传统的DBSCAN难以有效聚类。
**表5.1:高维数据聚类的挑战**
| 挑战 | 描述 |
| --- | --- |
| 密度稀疏 | 在高维空间中,数据点可能稀疏分布,缺乏足够的相邻点形成核心点。 |
| 距离浓缩效应 | 随着维度的增加,所有点之间的距离趋向均匀,距离度量失去区分能力。 |
| 计算量大 | 高维数据需要的存储和计算资源远远大于低维数据。 |
| 过拟合风险 | 高维特征容易导致模型过拟合,降低泛化能力。 |
| 维度重要性 | 高维数据中往往存在许多不重要的特征,会对聚类结果产生负面影响。 |
### 5.1.2 高维数据的DBSCAN改进算法
为了解决高维数据聚类的难题,研究人员提出了一些改进的DBSCAN算法。例如,使用特征选择或降维技术来减少数据的维度;或者调整密度定义来适应高维空间的特点。
```python
from sklearn.decomposition import PCA
from sklearn.cluster import DBSCAN
# 数据降维
pca = PCA(n_components=0.95) # 保留95%的信息
X_reduced = pca.fit_transform(X)
# 应用DBSCAN算法
db = DBSCAN(eps=0.5, min_samples=5)
labels = db.fit_predict(X_reduced)
# 输出聚类结果
print(labels)
```
**代码解释:**
通过使用主成分分析(PCA)减少数据的维度,我们首先保留了数据95%的信息来降低维度。然后应用DBSCAN进行聚类分析。在该示例中,`eps`和`min_samples`参数需要根据实际情况进行调整。
## 5.2 非欧氏距离的DBSCAN拓展
### 5.2.1 非欧氏距离度量的应用场景
在某些应用场景下,传统的欧几里得距离可能无法有效衡量数据点之间的相似性。例如,在文本数据聚类中,余弦相似度比欧氏距离更合适。因此,研究者们提出了使用不同类型的非欧氏距离来替代标准的欧氏距离。
### 5.2.2 实现非欧氏DBSCAN的方法
为了实现非欧氏距离的DBSCAN聚类,我们需要修改DBSCAN算法中的距离计算方式。具体来说,可以将算法中的距离函数替换为任意适用于数据类型的非欧氏距离函数。
```python
from scipy.spatial.distance import pdist, squareform
import numpy as np
def non_euclidean_distance(X, metric='cosine'):
if metric == 'cosine':
# 使用余弦相似度
D = squareform(pdist(X, metric='cosine'))
else:
# 使用其他非欧氏距离,例如曼哈顿距离
D = squareform(pdist(X, metric=metric))
return D
def non_euclidean_dbscan(D, eps, minPts):
# 使用非欧氏距离D进行DBSCAN聚类
# 此处省略聚类实现细节
pass
```
**代码逻辑分析:**
在此代码段中,我们首先定义了一个`non_euclidean_distance`函数,该函数根据输入的度量方法(默认为余弦相似度)计算非欧氏距离。然后在`non_euclidean_dbscan`函数中,我们将使用这些距离来进行聚类过程,注意这里仅展示了距离计算部分,完整的聚类逻辑需要另外实现。
## 5.3 DBSCAN在大数据环境中的应用
### 5.3.1 大数据聚类的挑战
大数据环境的特点是数据量大、种类多、生成速度快,这对DBSCAN算法提出了新的挑战。传统DBSCAN算法在处理大规模数据集时会遇到内存和计算资源的限制。因此,如何将DBSCAN算法扩展到大数据环境,成为了一个需要解决的问题。
### 5.3.2 并行化与分布式DBSCAN解决方案
针对大数据环境,一些并行化和分布式计算的方法被应用到DBSCAN算法中。这些方法通过在多台机器上分布式存储和计算数据,有效提升了算法处理大规模数据的能力。
```mermaid
graph LR
A[开始] --> B[数据分布式存储]
B --> C[并行计算邻域]
C --> D[合并局部聚类结果]
D --> E[全局聚类结果]
```
**mermaid流程图分析:**
上述流程图展示了分布式DBSCAN的一般处理流程。首先将数据分散存储在不同的节点上,然后并行计算各自节点上数据的邻域。接着,将局部聚类结果进行合并,最终得到全局的聚类结果。
## 总结
本章节深入探讨了DBSCAN算法在高级应用中的挑战和解决方案。通过分析高维数据和非欧氏距离的DBSCAN拓展方法,我们了解到面对不同数据特征时,DBSCAN需要进行一定的调整和优化。而在大数据环境下,通过并行化和分布式计算技术的应用,DBSCAN也能够有效处理大规模的数据集。随着计算技术的发展,DBSCAN算法未来将能够更好地应对各种复杂的数据科学问题。
# 6. DBSCAN算法的替代与比较
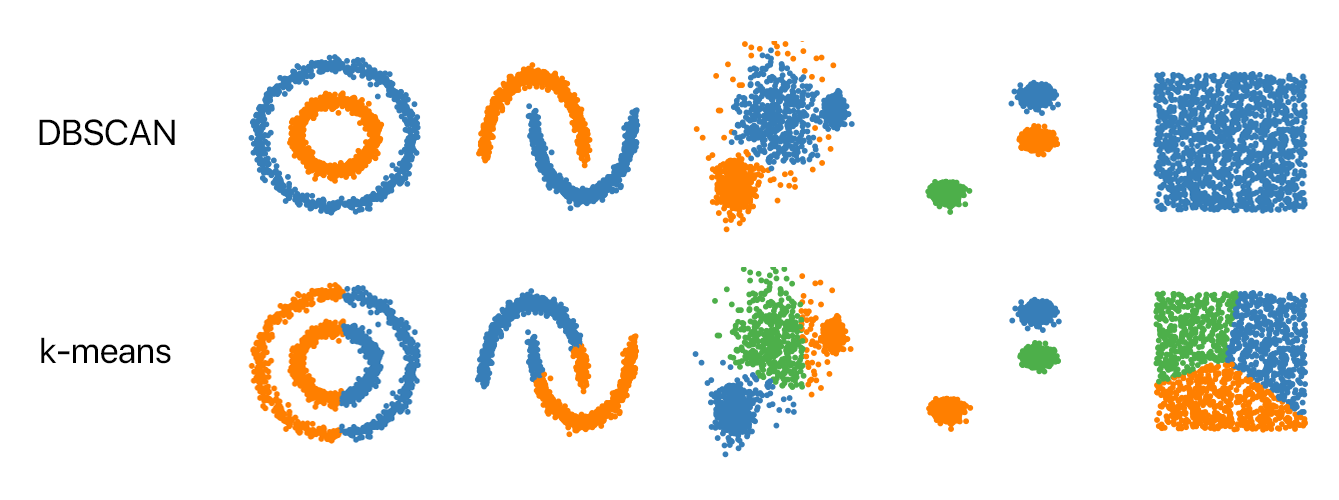
DBSCAN因其出色的聚类能力和对噪声的鲁棒性,在聚类算法中占有一席之地。然而,在不同的场景和需求下,其他聚类算法可能更加适合。本章将DBSCAN与K-means这两种常用的聚类算法进行比较,并简要介绍其他聚类算法,以帮助读者在不同场景下选择最合适的聚类方法。
## 6.1 DBSCAN与K-means算法的比较
### 6.1.1 算法适用场景差异
DBSCAN算法不依赖于聚类数量的预设,并且能够识别出任意形状的簇,这使其在处理大数据集和发现自然簇方面具有很大优势。例如,当数据集中包含噪声点和不同密度的簇时,DBSCAN表现得尤为出色。
相比之下,K-means算法则需要预先指定簇的数量(K值),并且它在簇是凸形状且大小相近时效果最佳。K-means更容易受到初始中心点选择的影响,并且对噪声和离群点较为敏感。
### 6.1.2 算法性能与聚类质量比较
在性能方面,DBSCAN的计算复杂度较高,特别是对于高维数据,其性能可能会显著下降。K-means在计算复杂度方面通常优于DBSCAN,尤其是在点的数量较多时。
从聚类质量来看,DBSCAN在识别噪声和异常值方面表现更好,因为它基于局部密度来判断点的归属。而K-means在簇的形状较为规则时能够产生紧凑的簇。聚类质量也受到数据集特性的影响,没有一种算法在所有情况下都是最优的。
### 6.1.3 实际应用场景对比
在实际应用中,如果数据集具有复杂的结构,且无法预估簇的数量,或者包含噪声点和离群点,DBSCAN通常是更好的选择。例如,在地理信息系统(GIS)中识别城市中的异常区域或者在网络安全领域检测异常行为模式时,DBSCAN的这些特性非常有用。
而K-means更适合那些数据结构简单、聚类形状规则且数量已知的情况。它在商业分析、市场细分和用户行为分析中经常被使用,如在顾客细分、市场研究或集群化产品推荐系统中。
## 6.2 其他聚类算法简介
### 6.2.1 层次聚类与谱聚类
层次聚类通过构建一个聚类树来发现数据的层次结构,可以分为凝聚和分裂两种方法。层次聚类比较适合中等规模的数据集,并且能够很好地反映数据的层次关系。
谱聚类基于图论,通过将数据点映射到图的顶点,并利用图的特性进行聚类。它在处理非球形簇和高维数据时效果较好,但计算成本相对较高。
### 6.2.2 最近邻聚类等其他方法
最近邻聚类(如OPTICS算法)是对DBSCAN的一种改进,它解决了DBSCAN在不同密度区域聚类时的问题,不需指定距离阈值ε。对于高维数据,最近邻聚类显示出更好的灵活性。
还有一些基于模型的聚类方法,如高斯混合模型(GMM),它假设数据是由几个高斯分布混合生成的,适用于发现具有复杂分布的数据结构。
## 6.3 聚类算法选择与应用建议
### 6.3.1 根据需求选择合适的算法
选择聚类算法时,需要考虑数据集的大小、特征的数量和类型、噪声和离群点的存在,以及簇的形状和数量。例如,如果数据集较小且结构相对简单,K-means可能是更好的选择。对于复杂的数据集结构,DBSCAN或层次聚类可能是更合适的选择。
### 6.3.2 算法的未来发展与趋势
聚类算法的研究和应用正在不断发展。未来的研究可能会集中在提升算法的效率,特别是在大数据和实时数据流聚类方面。同时,混合和集成聚类方法,即将多种聚类技术结合起来解决复杂问题,也是未来的一个重要研究方向。此外,自适应算法和半监督聚类也是正在探索的领域,以适应更多样化的应用场景需求。
在选择聚类算法时,应该充分理解算法的适用条件和局限性,并结合实际业务需求进行选择。通过适当的实验和验证,可以找到最适合特定应用场景的聚类算法。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 DBSCAN 聚类算法,涵盖了其核心概念、参数优化技巧、实际应用案例以及在不同领域的应用。从识别噪声和聚类核心点到优化 Hadoop 平台上的性能,再到图像处理和金融数据分析中的创新应用,专栏提供了全面的见解和实践指导。通过可视化技术、专家分享和数学原理的解释,专栏旨在帮助读者深入理解 DBSCAN 算法,并有效地将其应用于各种数据聚类任务。无论是初学者还是经验丰富的从业者,都能从本专栏中获得有价值的知识和见解。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【单片机bug无处藏身】:程序调试秘籍,快速定位问题!

# 摘要
单片机编程与调试在嵌入式系统领域扮演着关键角色。本文首先概述了单片机编程与调试的基础理论,随后介绍了程序设计的基本理论、原则以及优化策略。深入分析了调试前的准备工作、实际调试技术以及问题定位方法。本文还探讨了性能优化的理论基础和实践中的代码优化技术。最后,通过典型案例分析,展示了单片机程序调试过程的解析和高级调试技术的应用。整体而言,本文旨在为工程师提供一个全面的单片机编程与调试指南,并提供实用的优化和调
【24小时精通安川机器人】:新手必读的快速入门秘籍与实践指南

# 摘要
安川机器人作为自动化领域的重要工具,在工业生产和特定行业应用中发挥着关键作用。本文首先概述了安川机器人的应用领域及其在不同行业的应用实例。随后,探讨了安川机器人的基本操作和编程基础,包括硬件组成、软件环境和移动编程技术。接着,深入介绍了安川机器人的高级编程技术,如数据处理、视觉系统集成和网络通信,这些技术为机器人提供了更复杂的功能和更高的灵活性。
高通modem搜网注册流程优化:案例分析与实战技巧(20年技术大佬亲授)

# 摘要
本论文深入探讨了高通modem搜网注册流程的基础知识、理论分析、优化策略以及实践应用,并展望了搜网注册流程的发展前景。搜网注册流程对于移动设备连接网络至关重要,本文首先介绍了其基础组成和通信协议,然后分析了搜网注册中关键参数的设置及其对性能的影响,并提出了网络搜寻和注册流程性能优化的方法。通过对实际案例的剖析,论文还提炼了搜网注册流程在实战中的技巧和注意事项。
【性能基准测试】:极智AI与商汤OpenPPL在实时视频分析中的终极较量

# 摘要
实时视频分析技术在智能监控、安全验证和内容分析等多个领域发挥着越来越重要的作用。本文从实时视频分析技术的性能基准测试出发,对比分析了极智AI和商汤OpenPPL的技术原理、性能指标以及实践案例。通过对关键性能指标的对比,详细探讨了两者的性能优势与劣势。文章进一步提出了针对两大技术的性能优化策略,并预测了实时视频分析技术的未来发展趋势及其面临的挑战。研究发现,硬件加速技术和软件算法优化是提升实时视频
【刷机前必知】:Kindle Fire HDX7 三代用户须知的准备工作
# 摘要
本文全面介绍了Kindle Fire HDX7三代的刷机过程,涵盖了从理论知识到实践操作的各个方面。首先,文章对设备的硬件规格、刷机原理及风险进行了详细解析,并阐述了刷机前的必要准备。随后,通
新手必学:RN8209D硬件编程与代码示例入门
# 摘要
本文系统性地介绍了RN8209D硬件的编程基础、接口连接、编程环境搭建以及编程技巧。首先,概述了硬件编程的基础知识和接口类型及其功能。然后,详细说明了如何搭建编程环境,并提供了基础编程语言的选择和语法要点。文中还介绍了RN8209D基本指令集及其应用示例,包括GPIO编程。在高级编程技巧章节,本文探讨了中断处理、定时器配置、通信
【FPGA调试专家速成】:VIVADO底层调试技术与诊断秘笈
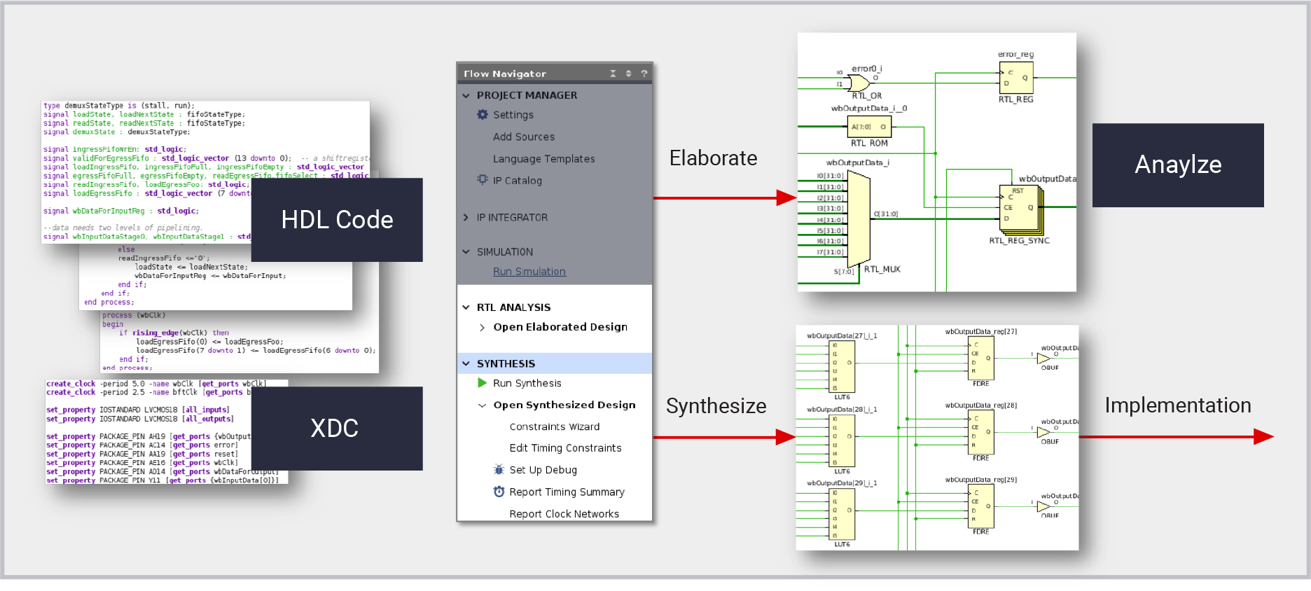
# 摘要
本论文提供了关于使用Xilinx Vivado工具对FPGA进行设计和调试的全面介绍。首先概述了FPGA和Vivado的基础知识,然后深入探讨了Vivado的设计流程和底层调试技术,包括时序分析、资源使用、功耗分析及信号完整性问题的诊断和解决策略。接着,论文通过实战案例分析展示了Vivado诊断工具的应用,如ILA调试工具和Vivado Logic Analyzer的高级应用。最后,文章探讨
C#反射与元编程:动态类型操作的魔法
# 摘要
本文探讨了C#编程语言中反射和元编程的基础原理与高级应用。首先介绍了C#反射的基本原理和应用场景,随后深入分析了元编程的核心技术,包括表达式树、代码生成和编译等方面。文章接着探讨了反射的高级用法,包括性能优化和动态代理,以及在框架开发中的运用。此外,还讨论了元编程在库和框架开发、领域特定语言(DSL)中的实际应用,并分析了其未来趋势和挑战。最后,通过案例研究和疑难解答,文章提供了解决实际开发问题的策略和技巧。
# 关键字
C#反射;元编程;表达式树;代码生成;动态代理;领域特定语言(DSL)
参考资源链接:[C# WinForm界面特效源码集锦470例](https://wenk
【Allegro PCB设计技巧集】:更换元件封装时的电源和接地策略
# 摘要
随着电子设备的复杂性增加,电源和接地在Allegro PCB设计中的作用变得越来越重要。本文首先概述了Alleg
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )