【TMS320F28335电机控制算法实现】:无刷直流电机案例的深度分析
发布时间: 2024-12-17 14:33:21 阅读量: 1 订阅数: 5 

matlab TMS320F28335 直流无刷电机

参考资源链接:[TMS320F28335中文数据手册:DSP开发速查](https://wenku.csdn.net/doc/6401ac00cce7214c316ea451?spm=1055.2635.3001.10343)
# 1. TMS320F28335微控制器概述
在探讨无刷直流电机控制技术之前,我们需要了解TMS320F28335微控制器这一核心硬件。本章将简介TMS320F28335微控制器的架构特点,以及其在电机控制领域的应用重要性。
## 1.1 微控制器的特点
TMS320F28335是德州仪器(TI)推出的高性能32位微控制器,专为实时控制应用设计,集成浮点运算单元,提供了高精度和快速控制的硬件支持。这使得F28335在需要快速和精确控制的无刷直流电机(BLDC)应用中非常受欢迎。
## 1.2 微控制器的功能模块
TMS320F28335包括多个功能模块,例如事件管理器、模数转换器(ADC)、串行通讯接口等。事件管理器模块为电机控制提供了PWM波形生成,捕获和位置编码器接口等功能。这些模块一起工作,能够实现电机的精确控制,包括速度控制、方向控制和转矩控制等。
## 1.3 微控制器在电机控制中的应用
在电机控制应用中,TMS320F28335微控制器能够实现复杂的控制算法,并且通过其高速处理能力,保证了控制的实时性。它通过软件编程实现对电机的启动、加速、减速、制动以及运行模式切换等多种控制。在实际应用中,它广泛用于工业自动化、电动车辆、航空电子等领域。
通过以上内容,我们可以看出TMS320F28335在无刷直流电机控制中的核心作用。接下来的章节将更深入地探讨无刷直流电机的基础知识、控制原理,以及如何将控制算法和硬件结合应用到实践中。
# 2. 无刷直流电机基础与控制原理
## 2.1 无刷直流电机的工作原理
### 2.1.1 电机的基本构造和工作模式
无刷直流电机(BLDC)是一种采用电子开关代替电刷换向的电机。其基本构造包括定子(固定部分)和转子(移动部分),定子通常由线圈和铁芯组成,而转子则由永磁体构成。没有电刷使得BLDC具有更长的使用寿命,更少的电磁干扰,更高的转速和更好的能效。
工作模式上,BLDC电机通常采用方波电流驱动,通过定子线圈的三相电流依次通电和断电来产生旋转磁场。转子内的永磁体受到这个旋转磁场的吸引和排斥作用,从而产生连续的旋转运动。
### 2.1.2 电机控制中的关键参数
在无刷直流电机的控制中,有几个关键参数需要关注:
- **转速**:电机轴每分钟的转动圈数,通常以rpm(每分钟转数)表示。
- **扭矩**:电机旋转时能够施加在负载上的力矩,通常以Nm(牛顿米)为单位。
- **功率**:电机输出的机械功率,单位为W(瓦特)。
- **电流**:电机在正常工作条件下消耗的电流量,单位为A(安培)。
- **电压**:电机两端的电位差,通常为直流电源提供的电压,单位为V(伏特)。
电机控制就是通过改变这些参数来实现对电机速度、方向和扭矩的精确控制。例如,通过调整输入电流的大小来改变电机的扭矩输出;调节相位差来控制电机的旋转方向等。
## 2.2 电机控制算法的理论基础
### 2.2.1 PID控制理论
PID控制是一种常见的反馈控制算法,它通过比例(P)、积分(I)和微分(D)三个控制环节的组合,实现对电机速度和位置的精确控制。具体来说:
- **比例环节(P)**:直接反映了系统的当前状态与期望状态的差距,P值越大,调整作用越强,但是可能会引起系统振荡。
- **积分环节(I)**:能够消除系统的长期偏差,使输出最终稳定在期望值上,但可能会导致响应速度变慢。
- **微分环节(D)**:预测了系统未来的变化趋势,有助于减少系统的超调,提高系统的稳定性。
PID控制算法在电机控制中的实现需要对比例、积分和微分三个参数进行精确调整,以满足不同的控制要求和电机特性。
### 2.2.2 矢量控制与直接转矩控制
矢量控制(也称场向量控制)和直接转矩控制是两种更高级的电机控制策略:
- **矢量控制**:通过将电机定子电流分解为与转子磁通正交的磁通分量和转矩分量,分别独立控制,从而实现类似直流电机的控制效果。这种方法可以对电机转矩和磁通进行精确控制,提高控制性能。
- **直接转矩控制(DTC)**:无需解耦处理,直接对电机的转矩和磁通进行控制。它通过选择合适的电压矢量来改变电机的磁通和转矩,从而达到快速、准确的控制效果。
以上两种方法都有各自的优势和适用场景,在电机控制领域有广泛的应用。
## 2.3 电机控制策略的选择与应用
### 2.3.1 不同控制策略的特点与适用场景
选择合适的电机控制策略需要根据具体的应用需求和电机特性。例如:
- 对于需要快速响应和高精度控制的场合,矢量控制或直接转矩控制是较好的选择。
- 在成本敏感型应用中,简单的开环控制或者基本的PID控制可能更受青睐。
每种策略都有其优缺点,比如PID控制算法实现简单,但适应性较低;矢量控制和直接转矩控制虽然性能优越,但实现复杂度较高,需要更多的计算资源。
### 2.3.2 实际应用中的策略优化
在实际应用中,需要对控制策略进行优化,以适应不同的工作环境和要求。优化的方法包括但不限于:
- 根据电机的工作特性和负载特性,调整PID参数,以获得最佳的动态响应和稳态性能。
- 实现更复杂的控制算法,如模糊控制或神经网络控制,以提高控制系统的鲁棒性和适应性。
- 使用先进的控制硬件,如高性能的微控制器或数字信号处理器(DSP),来实现复杂的控制算法,并提供更快的处理速度和更高的计算精度。
通过这些策略优化,可以显著提升无刷直流电机的性能,并满足更加复杂的应用需求。
# 3. TMS320F28335与无刷直流电机的接口设计
## 3.1 控制器的硬件接口分析
### 3.1.1 控制器引脚功能与配置
在深入探讨TMS320F28335微控制器与无刷直流电机(BLDC)的接口设计之前,我们必须先了解该微控制器的引脚功能及其在电机控制系统中的配置方法。TMS320F28335是一个32位浮点微控制器,它专门用于实时控制应用,广泛应用于工业自动化和电机控制领域。
引脚功能方面,TMS320F28335提供多种数字输入/输出、模拟输入、以及具有特定功能的引脚,如ADC输入、PWM输出等。在设计与无刷直流电机的接口时,以下引脚尤为重要:
- PWM引脚:提供多通道PWM输出,用于控制电机驱动器的开关。
- ADC引脚:用于读取电机运行中的各种模拟信号,如电流和电压。
- GPIO引脚:可用于外部中断、控制信号等。
在硬件接口设计中,要特别注意引脚的电气特性,如电流驱动能力、电平标准和输入/输出功能,以确保微控制器与电机驱动器之间的兼容性和稳定性。
### 3.1.2 驱动电路设计与实现
为了驱动无刷直流电机,必须使用合适的驱动电路。驱动电路通常由功率开关器件组成,比如MOSFET或IGBT,负责电机绕组的切换以及电机的正反转和速度调节。
在设计驱动电路时,需要考虑以下几个要点:
- 驱动能力:必须确保驱动电路可以提供足够的电流和电压给电机。
- 隔离保护:设计时应考虑隔离保护措施,避免电机故障影响到微控制器。
- 滤波设计:为了减少电磁干扰,应在电路中增加适当的滤波器。
此外,TMS320F28335微控制器需要通过一系列的外围电路与电机驱动器连接,包括必要的电平转换电路、隔离电路和电流检测电路。
以下是一个简化的驱动电路示例代码,展示了如何利用TMS320F28335的GPIO来实现电机启动和停止的控制逻辑。
```c
// 示例代码:电机启动与停止控制
#define MOTOR_PIN_START GPIO_getPin(3, 4) // 假设使用GPIO 3.4引脚控制电机启动
#define MOTOR_PIN_STOP GPIO_getPin(3, 5) // 假设使用GPIO 3.5引脚控制电机停止
void setup() {
// 初始化GPIO引脚模式为输出
GPIO_setPinMode(MOTOR_PIN_START, GPIO_OUTPUT);
GPIO_setPinMode(MOTOR_PIN_STOP, GPIO_OUTPUT);
// 确保电机处于停止状态
GPIO_writePin(MOTOR_PIN_START, LOW);
GPIO_writePin(MOTOR_PIN_STOP, HIGH);
}
void loop() {
// 启动电机
GPIO_writePin(MOTOR_PIN_START, HIGH);
delay(1000); // 延时1秒
// 停止电机
GPIO_writePin(MOTOR_PIN_STOP, LOW);
delay(1000); // 延时1秒
}
```
在以上代码中,我们使用了`GPIO_getPin`函数来获取指定GPIO引脚的句柄,`GPIO_setPinMode`函数来设置引脚模式,以及`GPIO_writePin`函数来控制引脚输出的高低电平,从而实现电机的启动与停止。
### 3.2 控制算法在TMS320F28335上的软件实现
#### 3.2.1 控制算法的软件框架搭建
在软件层面,TMS320F28335微控制器需要执行相应的控制算法来精确控制无刷直流电机。控制算法通常包括位置控制、速度控制和电流控制等模块。搭建控制算法的软件框架,是保证电机控制性能稳定和响应快速的基础。
软件框架的搭建通常从初始化微控制器的各个模块开始,包括时钟系统、中断系统、

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【Vivado DDS IP核:最佳实践分析】:揭秘定制频率正弦波输出的奥秘

参考资源链接:[VIVADO DDS IP核详解:设置、频率计算与仿真实战](https://wenku.csdn.net/doc/6412b5eebe7fbd1778d44e92?spm=1055.2635.3001.10343)
# 1. Vivado DDS IP核概述
数
NGboost算法理解:深入概率提升树背后的故事

参考资源链接:[清华镜像源安装NGBoost、XGBoost和CatBoost:数据竞赛高效预测工具](https://wenku.csdn.net/doc/64532205ea0840391e76f23b?spm=1055.2635.3001.10343)
# 1. NGBoost算法的理论基础
## 1.1 NGBoost的起源与定义
NGBoost,即Natural Grad
【LSI SAS 9311-8i集成与虚拟化指南】:无缝对接与配置技巧大解析
参考资源链接:[LSI SAS 9311-8i PCIe适配器用户指南](https://wenku.csdn.net/doc/604komobop?spm=1055.2635.3001.10343)
# 1. LSI SAS 9311-8i集成基础介绍
LSI SAS 9311-8i是LSI公司推出的一款高性能SAS控制器,广泛应用于服务器和存储系统中,是存储网络的
【高级应用手册】:文件系统维护与优化的高级技巧
参考资源链接:[MIKE 11 模型设置教程:从断面数据到水文参数](https://wenku.csdn.net/doc/7fx3ry4v8x?spm=1055.2635.3001.10343)
# 1. 文件系统的基本概念和重要性
## 1.1 文件系统的定义和功能
文件系统是操作系统用于管理数据的逻辑结构和物理存储的系统。它负责数据的存储、检索、更新、和删除。从技术角度讲,文件系统将数据存储为文件,而文件是一系
定制化PDF文档查看体验:PDFView.ocx的个性化开发技巧(个性化视图大揭秘)
参考资源链接:[YCanPDF PDFView OCX 控件功能与使用方法详解](https://wenku.csdn.net/doc/6412b6cdbe7fbd1778d48088?spm=1055.2635.3001.10343)
# 1. PDFView.ocx简介与应用场景
## 1.1
RS-485网络构建秘诀:CAHO P961多设备通信解决方案

参考资源链接:[CAHO_P961温控器RS-485 MODBUS编程与连接详解](https://wenku.csdn.net/doc/64617f5e5928463033b0f182?spm=1055.2635.3001.10343)
# 1. RS-485网络概述与技术标准
RS-485网络是工业通信领域常
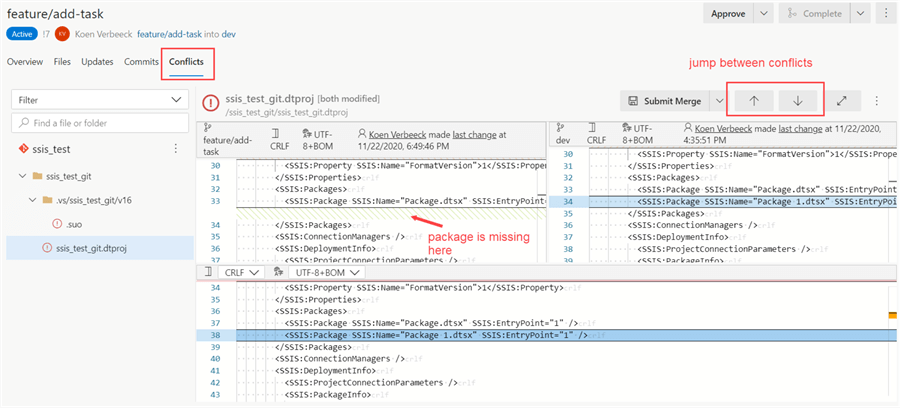
【解决Git冲突】:Windows下Git合并冲突解决技巧
参考资源链接:[加速下载:Windows Git 官方版本百度网盘分享](https://wenku.csdn.net/doc/1o88jkk5vw?spm=1055.2635.3001.10343)
# 1. Git冲突的基本概念
## 1.1 什么是Git冲突
Git冲突发生在多人协作开发过程中,当两个或多个开发者对同一文件的同一部分进行了
【键盘的世界,全球化的选择】:Filco圣手二代满足全球用户需求之道

参考资源链接:[Filco圣手二代:多语言操作指南与设置详解](https://wenku.csdn.net/doc/9bvnictv8o?spm=1055.2635.3001.10343)
# 1. 键盘的世界与全球化市场
键盘作为计算机时代必不可少的输入设备,承载着全球化沟通与交流的核心功能。本章将简要概述键盘的发展历程,分析其在不同文化和市场中的多样性,并探讨全
Conefor Sensinode 2.6 数据保护:备份策略与灾难恢复的终极指南
参考资源链接:[conefor sensinode2.6操作手册(中文版)](https://wenku.csdn.net/doc/64
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )