【PCL进阶编程技巧】:探索PCL的高级应用和潜能
发布时间: 2025-01-07 07:03:18 阅读量: 15 订阅数: 14 
# 摘要
本文全面介绍了点云库(PCL)的功能、数据结构、高级特性及其在三维重建、机器学习和实际项目中的应用。首先概述了PCL库的基本概念和高级特性,然后深入解析了其数据结构和处理管道,包括点云数据的表示方法、类型转换、操作以及管道构建和优化策略。接着探讨了高级滤波器技术的应用场景和性能选择。在三维重建方面,文章分析了特征提取、匹配、表面重建、网格生成和大规模点云数据的处理技术。此外,本文还阐述了PCL与机器学习技术的融合,包括点云数据的机器学习方法、目标检测与识别以及强化学习在三维导航中的应用。最后,通过实战案例分析,展示了项目需求分析、系统设计、技术实现、代码剖析、性能优化和测试。整体而言,本文为读者提供了一个关于PCL在点云处理和三维感知领域全面的技术指南。
# 关键字
点云库;数据结构;三维重建;机器学习;滤波器技术;性能优化;项目实战案例
参考资源链接:[PCL语言入门:Patran的二次开发解析](https://wenku.csdn.net/doc/1ir3m3b40v?spm=1055.2635.3001.10343)
# 1. PCL库概述及其高级特性
点云库(PCL)是一个独立的开源库,它提供了众多的算法和数据结构,用于处理二维/三维图像处理和计算机视觉领域的点云数据。PCL广泛应用于机器人感知、自动驾驶、3D重建、增强现实等多个领域。它不仅支持各种点云数据的读写、过滤、特征提取、配准和表面重建,还支持机器学习方法,提供了一个高度集成和灵活的环境来处理点云数据。
## 1.1 PCL库的优势
PCL的一个显著优势在于它的模块化架构,使得它能够根据应用程序的需求进行定制和扩展。它以C++编写,提供了大量的封装好的函数和类,同时为了方便用户,提供了Python和MATLAB等语言的接口。对于需要高性能计算的场景,PCL充分利用了现代硬件的优势,比如多核处理器和GPU加速。
## 1.2 高级特性概览
除了基础的点云处理功能,PCL还包含了一些高级特性,例如:
- **表面重建与网格生成**:用于将散乱的点云数据转换成连续的表面模型。
- **特征提取与匹配**:识别点云中的独特几何结构,可以用于对象识别和三维定位。
- **数据滤波与降噪**:对于从现实世界获取的数据,滤波和降噪是必不可少的步骤,以提高数据质量。
- **点云配准与融合**:将来自不同视角或时间的点云数据对齐,以获得完整的三维场景。
通过这些高级特性,PCL能够支持从点云数据的初步处理到复杂的应用场景,如三维重建、机器人导航和增强现实等。在下一章节中,我们将深入探讨PCL的数据结构及其处理方法,以帮助读者更好地理解并应用这些高级特性。
# 2. PCL数据结构深入解析
## 2.1 点云数据结构
### 2.1.1 点云数据的表示方法
点云是由一系列的点组成的集合,每个点代表了在三维空间中的一个位置。在PCL(Point Cloud Library)中,点云数据主要通过点云对象来表示,最常用的类型是`pcl::PointCloud<PointT>`,其中`PointT`可以是PCL内置的点类型之一,如`pcl::PointXYZ`、`pcl::PointXYZRGB`等,也可以是用户自定义的类型。
点云的表示方法直接关联到其应用领域。例如,XYZ类型仅包含了空间坐标信息,而XYZRGB类型则额外包含了颜色信息。用户自定义点类型可能包括表面法线、反射率、时间戳等更丰富的信息。
代码块展示如何创建和使用`pcl::PointCloud`对象:
```cpp
#include <pcl/point_types.h>
#include <pcl/point_cloud.h>
// 创建一个XYZ点类型点云
pcl::PointCloud<pcl::PointXYZ> cloud;
// 添加点到点云
cloud.push_back(pcl::PointXYZ(0.0, 0.0, 0.0));
cloud.push_back(pcl::PointXYZ(1.0, 1.0, 1.0));
// 获取点云中点的数量
std::cout << "Point cloud contains " << cloud.points.size() << " data points." << std::endl;
// ... 点云处理操作 ...
```
在上述代码中,首先包含了PCL的点类型头文件,然后创建了一个点云对象`cloud`。通过`push_back`方法,向点云中添加了两个点。最终,通过`points.size()`方法可以获取点云中点的数量。
### 2.1.2 点云数据类型的转换和操作
点云数据类型之间的转换是常见的操作,例如,将XYZ点云转换为XYZRGB点云以包含颜色信息。PCL提供了一系列的函数用于执行这类转换操作。
代码块展示点云数据类型转换:
```cpp
#include <pcl/point_types.h>
#include <pcl/common/common.h>
#include <pcl/common/transforms.h>
#include <pcl/io/pcd_io.h>
// 读取点云文件
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
if (pcl::io::loadPCDFile<pcl::PointXYZ>("input.pcd", *cloud) == -1) {
PCL_ERROR("Couldn't read file input.pcd \n");
return -1;
}
// 创建XYZRGB点云,假设所有点的颜色都是红色
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud_rgb(new pcl::PointCloud<pcl::PointXYZRGB>);
cloud_rgb->reserve(cloud->size());
for (size_t i = 0; i < cloud->size(); ++i) {
pcl::PointXYZRGB new_point = cloud->points[i];
new_point.r = 255; // 红色分量
new_point.g = 0; // 绿色分量
new_point.b = 0; // 蓝色分量
cloud_rgb->points.push_back(new_point);
}
```
在该代码段中,首先读取了一个XYZ点云文件,然后创建了一个新的XYZRGB点云对象`cloud_rgb`。通过遍历原始点云,每个点都被复制到新的点云对象中,并设置为红色。
## 2.2 点云处理管道
### 2.2.1 管道的概念和构建
在PCL中,处理点云的常用方式是使用点云处理管道,这是由一系列的滤波器和处理步骤组成的一个流程。这个流程的概念类似于UNIX系统的管道命令,每个步骤接受输入,处理数据,并将结果传递给下一个步骤。
构建一个点云处理管道的步骤通常包括:
- 初始化点云对象
- 添加处理步骤(例如滤波器)
- 设置处理步骤的参数
- 执行管道处理
下面的代码段展示了如何构建和执行一个简单的点云处理管道:
```cpp
#include <pcl/filters/statistical_outlier_removal.h>
// 创建点云对象
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
if (pcl::io::loadPCDFile<pcl::PointXYZ>("input.pcd", *cloud) == -1) {
PCL_ERROR("Couldn't read file input.pcd \n");
return -1;
}
// 创建滤波器对象
pcl::StatisticalOutlierRemoval<pcl::PointXYZ> sor;
sor.setInputCloud(cloud);
sor.setMeanK(50); // 设置在进行统计时考虑的临近点个数
sor.setStddevMulThresh(1.0); // 设置判断是否为离群点的阈值
sor.filter(*cloud); // 执行滤波器
```
在这段代码中,我们创建了一个点云对象,并使用统计离群点滤波器(StatisticalOutlierRemoval)对点云进行去噪处理。`setMeanK`设置了滤波器使用的邻域大小,而`setStddevMulThresh`参数则用于控制点被认为是离群点的条件。
### 2.2.2 管道参数的优化策略
构建好点云处理管道之后,我们面临的一个重要任务是优化管道中各个处理步骤的参数,以达到最佳的处理效果。优化通常涉及以下策略:
- 对每个处理步骤都进行参数的调整和测试
- 使用交叉验证或者留一验证等方法对参数进行评估
- 在不同类型的点云数据上测试参数,以确保参数的泛化能力
代码块展示如何优化统计滤波器的参数:
```cpp
#include <pcl/filters/statistical_outlier_removal.h>
// 假设我们有一个点云对象cloud和统计滤波器sor
std::vector<int> removed_point_indices; // 存储被移除的点的索引
// 对不同的邻域大小进行测试
for (int mean_k = 30; mean_k <= 70; mean_k += 10) {
sor.setMeanK(mean_k);
// 执行滤波器
pcl::PointCloud<pcl::PointXYZ>::Ptr filtered_cloud(new pcl::PointCloud<pcl::PointXYZ>);
sor.filter(*filtered_cloud);
// 计算并记录去除的点数量
size_t num_removed_points = cloud->points.size() - filtered_cloud->points.size();
std::cout << "mean_k = " << mean_k << " -> removed " << num_removed_points << " points." << std::endl;
removed_point_indices.clear(); // 清空数组
for (size_t i = 0; i < cloud->points.size(); i++) {
if (std::find(filtered_cloud->points.begin(), filtered_cloud->points.end(), cloud->points[i]) == filtered_cloud->points.end()) {
removed_point_indices.push_back(i);
}
}
// 对于实际应用,可能会基于某些标准进一步分析被移除的点
}
```
在这个代码块中,我们通过循环调整`meanK`参数,并统计每次滤波后去除的点的数量。通过比较不同参数设置下的结果,我们可以选择一个最佳的参数值。
## 2.3 高级滤波器技术
### 2.3.1 各类滤波器的应用场景
PCL提供了多种滤波器,每种滤波器都有其特定的应用场景:
- **体素网格滤波器(VoxelGrid)**:用于降低点云数据的分辨率,常用于预处理步骤以减少数据量。
- **统计滤波器(StatisticalOutlierRemoval)**:用于去除离群点,适用于去除噪声。
- **表面法线滤波器(SurfaceNormalEstimation)**:用于计算点云中每个点的表面法线,对表面分析很重要。
不同滤波器的选择依赖于数据的特性以及处理目标。例如,如果目的是减少数据量而不损失太多细节,则体素网格滤波器是一个不错的选择。如

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入介绍了 Patran 的二次开发语言 PCL,提供了一系列循序渐进的教程,帮助读者掌握 PCL 的各个方面。从环境搭建到数据结构分析,从数据交互到界面构建,再到脚本调试和性能优化,专栏涵盖了 PCL 的方方面面。此外,还探讨了 PCL 的高级应用,如自动化脚本编程、数据库交互、图形用户界面设计和跨平台开发。通过学习本专栏,读者可以充分利用 PCL 的强大功能,扩展 Patran 的功能,提高工作效率,并解决复杂工程问题。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
三菱NZ81GP21-SX型接口板安装与配置:CC-Link IE技术基础完全攻略

# 摘要
CC-Link IE技术作为一种工业以太网解决方案,已被广泛应用于自动化控制领域。本文首先概述了CC-Link IE技术的基本概念及其重要性。随后,重点介绍了三菱NZ81GP21-SX型接口板的硬件结构及功能,并详细阐述了其安装步骤,包括物理安装和固件更新。接着,本文深入探讨了CC-Link I
【Pinpoint性能监控深度解析】:架构原理、数据存储及故障诊断全攻略
# 摘要
Pinpoint性能监控系统作为一款分布式服务追踪工具,通过其独特的架构设计与数据流处理机制,在性能监控领域展现出了卓越的性能。本文首先概述了Pinpoint的基本概念及其性能监控的应用场景。随后深入探讨了Pinpoint的架构原理,包括各组件的工作机制、数据收集与传输流程以及分布式追踪系统的内部原理。第三章分析了Pinpoint在数据存储与管理方面的技术选型、存储模型优化及数据保留策略。在第四章中,本文详细描述了Pinpoint的故障诊断技术,包括故障分类、实时故障检测及诊断实例。第五章探讨了Pinpoint的高级应用与优化策略,以及其未来发展趋势。最后一章通过多个实践案例,分享了
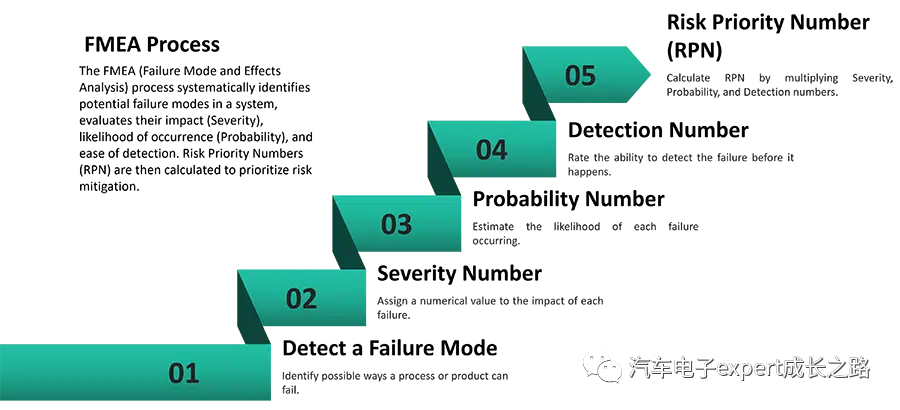
软件工程中的FMEA实战:从理论到实践的完整攻略
# 摘要
FMEA(故障模式与影响分析)是软件工程中用于提高产品可靠性和安全性的重要质量工具。本文详细解析了FMEA的基本概念、理论基础和方法论,并探讨了其在软件工程中的分类与应用。文章进一步阐述了FMEA实践应用的流程,包括准备工作、执行分析和报告编写等关键步骤。同时,本文还提供了FMEA在敏捷开发环境中的应用技巧,并通过案例研究分享了成功的行
CITICs_KC接口数据处理:从JSON到XML的高效转换策略
![CITICs_KC股票交易接口[1]](https://bytwork.com/sites/default/files/styles/webp_dummy/public/2021-07/%D0%A7%D1%82%D0%BE%20%D1%82%D0%B0%D0%BA%D0%BE%D0%B5%20%D0%9B%D0%B8%D0%BC%D0%B8%D1%82%D0%BD%D1%8B%D0%B9%20%D0%BE%D1%80%D0%B4%D0%B5%D1%80.jpg?itok=nu0IUp1C)
# 摘要
随着信息技术的发展,CITICs_KC接口在数据处理中的重要性日益凸显。本文首先概述了C
光学信号处理揭秘:Goodman版理论与实践,光学成像系统深入探讨

# 摘要
本文系统地介绍了光学信号处理的基础理论、Goodman理论及其深入解析,并探讨了光学成像系统的实践应用。从光学信号处理的基本概念到成像系统设计原理,再到光学信号处理技术的最新进展和未来方向,本文对光学技术领域的核心内容进行了全面的梳理和分析。特别是对Goodman理论在光学成像中的应用、数字信号处理技术、光学计算成像技术进行了深入探讨。同时,本文展望了量子光学信号处理、人工智能在光
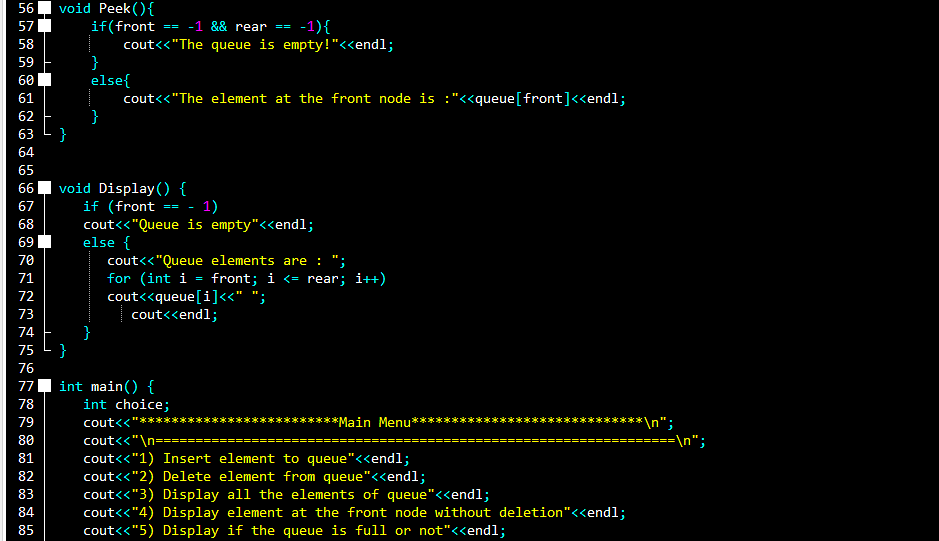
队列的C语言实现:从基础到循环队列的进阶应用
# 摘要
本论文旨在系统地介绍队列这一基础数据结构,并通过C语言具体实现线性队列和循环队列。首先,本文详细解释了队列的概念、特点及其在数据结构中的地位。随后,深入探讨了线性队列和循环队列的实现细节,包括顺序存储结构设计、入队与出队操作,以及针对常见问题的解决方案。进一步,本文探讨了队列在
【CAXA图层管理:设计组织的艺术】:图层管理的10大技巧让你的设计井井有条
# 摘要
图层管理是确保设计组织中信息清晰、高效协同的关键技术。本文首先介绍了图层管理的基本概念及其在设计组织中的重要性,随后详细探讨了图层的创建、命名、属性设置以及管理的理论基础。文章进一步深入到实践技巧,包括图层结构的组织、视觉管理和修改优化,以及CAXA环境中图层与视图的交互和自动化管理。此外,还分析了图层管理中常见的疑难问题及其解决策略,并对图层管理技术的未来发展趋势进行了展望,提出了一系列面向未来的管理策略。
# 关键字
图层管理;CAXA;属性设置;实践技巧;自动化;协同工作;未来趋势
参考资源链接:[CAXA电子图板2009教程:绘制箭头详解](https://wenku.c
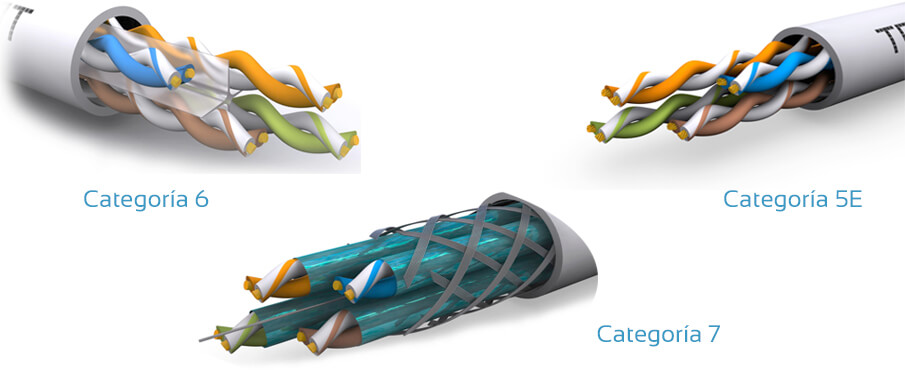
NET.VB_TCPIP协议栈深度解析:从入门到精通的10大必学技巧
# 摘要
本文全面探讨了TCP/IP协议栈的基础理论、实战技巧以及高级应用,旨在为网络工程师和技术人员提供深入理解和高效应用TCP/IP协议的指南。文章首先介绍了TCP/IP协议栈的基本概念和网络通信的基础理论,包括数据包的封装与解封装、传输层协议TCP和UDP的原理,以及网络层和网络接口层的关键功能。接着,通过实战技巧章节,探讨了在特定编程环境下如VB进行
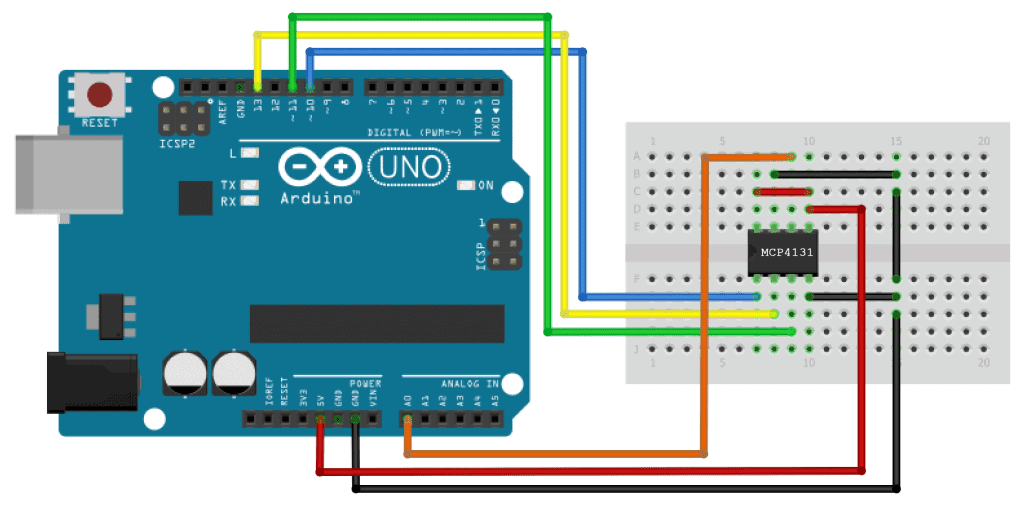
MCP41010数字电位计初始化与配置:从零到英雄
# 摘要
本文全面介绍MCP41010数字电位计的功能、初始化、配置以及高级编程技巧。通过深入探讨其工作原理、硬件接口、性能优化以及故障诊断方法,本文为读者提供了一个实用的技术指导。案例研究详细分析了MCP41010在电路调节、用户交互和系统控制中的应用,以
【Intouch界面初探】:5分钟掌握Intouch建模模块入门精髓

# 摘要
本文系统性地介绍了Intouch界面的基本操作、建模模块的核心概念、实践应用,以及高级建模技术。首先,文章概述了Intouch界面的简介与基础设置,为读者提供了界面操作的起点。随后,深入分析了建模模块的关键组成,包括数据驱动、对象管理、界面布局和图形对象操作。在实践应用部分,文章详细讨论了数据
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )