【数据结构终极复习】:20年经验技术大佬深度解读,带你掌握最实用的数据结构技巧和原理
发布时间: 2024-12-26 12:10:52 阅读量: 10 订阅数: 9 

蓝桥杯LeeCode数据结构与算法资源
# 摘要
数据结构是计算机科学的核心内容,为数据的存储、组织和处理提供了理论基础和实用方法。本文首先介绍了数据结构的基本概念及其与算法的关系。接着,详细探讨了线性、树形和图形等基本数据结构的理论与实现方法,及其在实际应用中的特点。第三章深入分析了高级数据结构的理论和应用,包括字符串匹配、哈希表设计、红黑树、AVL树、堆结构、优先队列以及图的应用扩展。第四章聚焦于数据结构在编程实践中的应用,涵盖了排序和搜索算法、系统设计中的数据结构选择以及数据结构与算法的优化技巧。第五章提供了数据结构面试题的解析,旨在帮助读者准备面试和理解面试官的解题思路。最后,第六章展望了数据结构的未来研究方向和应用领域,包括新兴数据结构的研究和数据结构在分布式系统、机器学习、量子计算等领域的发展前景。本文旨在为读者提供一个全面且深入的数据结构知识框架,以便在实际工作和研究中更有效地利用这些重要概念。
# 关键字
数据结构;算法实现;排序搜索;系统设计;优化技巧;前沿研究
参考资源链接:[严蔚敏清华数据结构PPT:详细讲解与实例剖析](https://wenku.csdn.net/doc/2iggijzbj8?spm=1055.2635.3001.10343)
# 1. 数据结构简介
## 数据结构基本概念
在计算机科学和信息技术领域,数据结构是一种存储、组织数据的方式,它能够优化数据的操作效率。数据结构通常涉及数据元素的集合、数据间的关系以及数据元素的操作方法。它不仅关注数据存储本身,更关注数据间的关联和操作算法的效率。理解数据结构,可以更好地理解计算机处理信息的方式。
## 数据结构与算法的关系
数据结构与算法是计算机科学的两个基本概念,它们相互依赖,密不可分。算法是解决问题的一系列步骤,而数据结构则是算法操作的“原料”——它们是算法执行过程中的数据组织形式。一个良好的数据结构能够显著提升算法的性能;反之,一个高效的算法也必须建立在合适的数据结构之上。简单来说,数据结构是算法的载体,算法是数据结构的灵魂。因此,想要编写出高性能的程序,对数据结构和算法有深入的理解是必不可少的。
# 2. 基本数据结构理论与实现
## 2.1 线性数据结构
### 2.1.1 数组和链表的区别与应用
数组和链表是线性数据结构中的两种基本类型,它们各有特点,在实际应用中根据不同的需求选择使用。
数组(Array)是由一系列相同类型的数据构成的集合,它使用连续的内存空间存储数据元素,每个元素通过索引直接访问。数组的特点包括:
- 固定大小:一旦创建,大小不可改变;
- 内存连续:数据存储在连续的内存块中;
- 高速访问:通过索引直接计算内存位置,实现快速访问;
- 插入和删除成本高:需要移动元素以保持连续性。
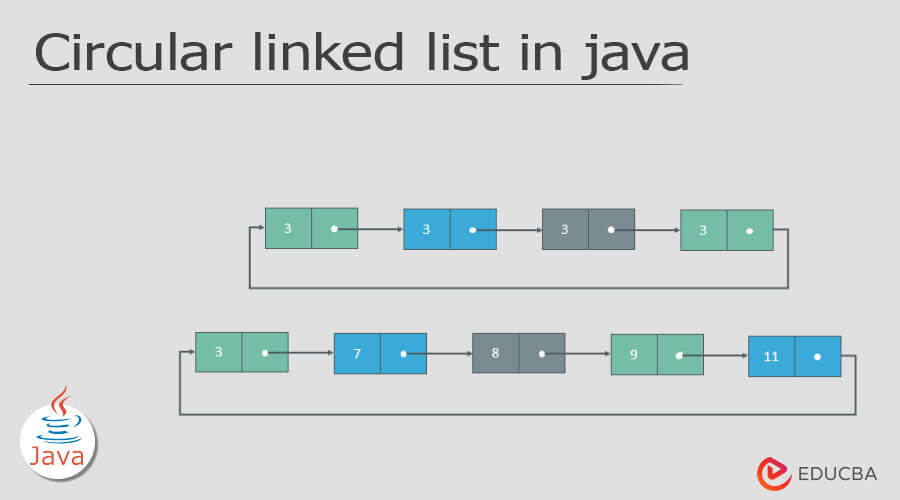
链表(LinkedList)是由一系列节点组成的集合,每个节点包含数据和指向下一个节点的指针。链表的特点包括:
- 动态大小:可以动态添加或删除节点;
- 内存非连续:节点之间通过指针连接;
- 访问速度慢:需要从头节点开始遍历,不能直接跳转;
- 插入和删除成本低:仅需修改相邻节点的指针。
**应用场景分析**:
- 数组由于其高效的随机访问能力,适用于元素数量固定且频繁访问的场景,例如编译时已知大小的集合、多维矩阵等;
- 链表由于其动态扩展性,适用于元素数量变化不定、频繁插入和删除元素的场景,例如实现队列、栈等数据结构。
### 2.1.2 栈和队列的原理及实现
栈(Stack)和队列(Queue)是两种具有特定顺序访问要求的线性数据结构。
栈是一种后进先出(LIFO)的数据结构,只能在一端进行插入(push)和删除(pop)操作。它的操作主要包含:
- push:在栈顶添加一个元素;
- pop:移除栈顶元素,并返回该元素;
- peek:返回栈顶元素但不移除它。
栈的操作复杂度通常是O(1)。在程序语言中,栈通常用于函数调用的实现、撤销操作等。
队列是一种先进先出(FIFO)的数据结构,它有两个主要操作:
- enqueue:在队尾添加一个元素;
- dequeue:移除队首元素,并返回该元素;
- peek:返回队首元素但不移除它。
队列的实现通常采用循环队列以优化空间利用率。队列广泛应用于任务调度、缓冲处理等场景。
**栈和队列的代码示例**(假设使用Python):
```python
class Stack:
def __init__(self):
self.stack = []
def push(self, item):
self.stack.append(item)
def pop(self):
return self.stack.pop()
def peek(self):
return self.stack[-1]
class Queue:
def __init__(self):
self.queue = []
def enqueue(self, item):
self.queue.append(item)
def dequeue(self):
return self.queue.pop(0)
def peek(self):
return self.queue[0]
```
通过以上代码,我们实现了栈和队列的基本操作。在实现时,应注意操作的复杂度和空间利用率,以满足不同场景下的性能要求。
## 2.2 树形数据结构
### 2.2.1 二叉树的基本操作
二叉树(Binary Tree)是一种每个节点最多有两个子节点的树形结构。在二叉树中,每个节点都有一个左子节点和一个右子节点。二叉树的基本操作包括插入、删除和查找。
- 插入操作:
在二叉树中插入新节点,通常需要从根节点开始,根据目标位置比较节点值,递归地选择左子树或右子树进行插入。
- 删除操作:
删除节点则较为复杂,可能涉及三种情况:
- 删除的是叶子节点:直接删除;
- 删除的节点只有一个子节点:用其子节点替换它;
- 删除的节点有两个子节点:找到其右子树中的最小值节点或左子树中的最大值节点,用该值替换要删除的节点,然后删除那个值的原始节点。
- 查找操作:
查找节点通常是从根节点开始,比较节点值,递归地选择左子树或右子树进行查找。
二叉树的实现代码(使用Python):
```python
class TreeNode:
def __init__(self, val=0, left=None, right=None):
self.val = val
self.left = left
self.right = right
class BinaryTree:
def __init__(self):
self.root = None
def insert(self, val):
if not self.root:
self.root = TreeNode(val)
else:
self._insert_recursive(self.root, val)
def _insert_recursive(self, node, val):
if val < node.val:
if node.left is None:
node.left = TreeNode(val)
else:
self._insert_recursive(node.left, val)
elif val > node.val:
if node.right is None:
node.right = TreeNode(val)
else:
self._insert_recursive(node.right, val)
else:
print("Value already in tree")
# 删除和查找方法的实现省略...
```
通过以上实现,我们可以看到二叉树的基本结构和插入操作的逻辑。二叉树的其他操作(删除、查找)也有类似的递归逻辑。
### 2.2.2 平衡树和B树的应用场景
平衡树(如 AVL 树、红黑树)和 B树是为了解决二叉搜索树在特定操作下的效率问题而设计的数据结构。它们通过维持树的平衡特性,保证了在插入、删除和查找操作时,树的高度保持在对数级别。
- 平衡树:
- AVL 树是最早发明的自平衡二叉搜索树,在AVL树中任何节点的两个子树的高度最大差别为1。
- 红黑树是一种自平衡二叉查找树,它在每个节点上增加了一个存储位表示节点的颜色,可以是红或黑,通过红黑树的特性,可以确保最长路径不会超过最短路径的两倍。
- B树:
- B树是一种平衡的多路查找树,特别适合读写相对较大的数据块的系统,如磁盘存储。B树通过分裂和合并节点来保持平衡,并允许节点拥有多个子节点(通常在数据库和文件系统中使用)。
**应用场景**:
- 平衡树广泛应用于需要频繁更新的场合,比如关联数组和优先队列;
- B树由于其多路分支的特性,在数据库索引中应用广泛,因为它们能有效减少磁盘I/O次数。
## 2.3 图形数据结构
### 2.3.1 图的表示方法和遍历算法
图(Graph)是一种数据结构,由顶点集合和连接这些顶点的边集合组成。图可以是有向图(边有方向)或无向图(边没有方向)。
图的表示方法有:
- 邻接矩阵:使用二维数组表示图,数组的元素表示顶点间的关系。邻接矩阵适合表示稠密图。
- 邻接表:使用链表来表示每个顶点的邻接顶点。邻接表适合表示稀疏图。
图的遍历算法包括:
- 深度优先搜索(DFS):通过递归或栈的方式实现。遍历过程中尽可能深地搜索图的分支。
- 广度优先搜索(BFS):通过队列实现。按照距离起始点的远近顺序来访问顶点。
以下是使用Python实现的图类和DFS与BFS算法:
```python
class Graph:
def __init__(self, vertices):
self.V = vertices
self.adj_list = {i: [] for i in range(self.V)}
def add_edge(self, u, v):
self.adj_list[u].append(v)
# 深度优先遍历
def DFS(graph, start):
visited = set()
stack = [start]
while stack:
vertex = stack.pop()
if vertex not in visited:
print(vertex, end=' ')
visited.add(vertex)
for neighbor in sorted(graph.adj_list[vertex], reverse=True):
if neighbor not in visited:
stack.append(neighbor)
# 广度优先遍历
def BFS(graph, start):
visited = set()
queue = [start]
visited.add(start)
while queue:
vertex = queue.pop(0)
print(vertex, end=' ')
for neighbor in sorted(graph.adj_list[vertex]):
if neighbor not in visited:
queue.append(neighbor)
visited.add(neighbor)
```
通过以上代码,我们看到了图的基本结构表示方法和遍历算法的实现。图的遍历在很多实际应用中都有非常广泛的应用,例如网络路由算法和社交网络分析。
### 2.3.2 最短路径和最小生成树问题
图的最短路径问题是指在一个图中找到两个顶点之间的最短路径,而最小生成树问题是指在加权连通图中找到一个总权值最小的树结构,连接所有顶点。
- 最短路径问题:
- Dijkstra算法适用于带权重的有向或无向图,且不包含负权重边。它通过贪心策略逐步构建最短路径。
- Bellman-Ford算法可以处理包含负权重边的图,它不断松弛所有边,直到找到最短路径。
- 最小生成树问题:
- Kruskal算法和Prim算法是两种常用的最小生成树算法。Kruskal算法按边的权重顺序处理,避免形成环路;Prim算法从一个顶点开始,逐步扩展生成树。
以下是使用Python实现的Dijkstra算法和Kruskal算法的示例代码:
```python
# Dijkstra算法
def dijkstra(graph, start):
distances = {vertex: float('infinity') for vertex in graph.adj_list}
distances[start] = 0
priority_queue = [(0, start)]
while priority_queue:
current_distance, current_vertex = heapq.heappop(priority_queue)
if current_distance > distances[current_vertex]:
continue
for neighbor, weight in graph.adj_list[current_vertex].items():
distance = current_distance + weight
if distance < distances[neighbor]:
distances[neighbor] = distance
heapq.heappush(priority_queue, (distance, neighbor))
return distances
# Kruskal算法
class DisjointSet:
def __init__(self, vertices):
self.sets = {vertex: vertex for vertex in vertices}
def find(self, node):
if self.sets[node] != node:
self.sets[node] = self.find(self.sets[node])
return self.sets[node]
def union(self, node1, node2):
root1 = self.find(node1)
root2 = self.find(node2)
if root1 != root2:
self.sets[root2] = root1
def kruskal(graph):
mst = []
edges = [(weight, start, end) for start, adj in graph.adj_list.items() for end, weight in adj.items()]
edges.sort()
disjoint_set = DisjointSet(graph.vertices)
for weight, start, end in edges:
if disjoint_set.find(start) != disjoint_set.find(end):
disjoint_set.union(start, end)
mst.append((start, end, weight))
return mst
```
以上代码展示了Dijkstra算法和Kruskal算法在Python中的实现。这些算法是图论和网络优化问题中的重要基础,并且在实际应用中有着广泛的应用,如网络路由、交通规划等。
在本章节中,我们介绍了线性数据结构、树形数据结构和图形数据结构的基本概念和实现方法,同时分析了它们的应用场景。这些基础数据结构是构建更复杂数据结构和高效算法的基础。在下一章中,我们将进一步探讨更高级的数据结构,并讨论它们在实际编程实践中的应用。
# 3. 复杂数据结构深入探讨
## 高级线性数据结构
### 字符串匹配算法的应用
字符串匹配是计算机科学中的一个经典问题,它在文本编辑器、搜索引擎、生物信息学等领域有着广泛的应用。要掌握字符串匹配算法,首先需要了解基本概念:
- **模式(Pattern)**:在主字符串中搜索的小字符串。
- **主字符串(Text)**:通常较模式长的字符串,需要在其中搜索模式。
- **匹配(Match)**:主字符串中与模式相等的子串。
在本节中,我们将讨论两种常见的字符串匹配算法:朴素字符串匹配和KMP算法。
#### 朴素字符串匹配
朴素字符串匹配是最直观的方法。它通过简单地比较模式和主字符串中的字符来查找匹配。算法描述如下:
1. 将模式的每一个字符与主字符串从左到右的第一个字符对齐。
2. 比较当前对齐下的所有字符是否相等。
3. 如果不相等,则将模式向右滑动一位,重复步骤2。
4. 如果在某个位置上字符全部相等,则找到一个匹配。
5. 继续从主字符串的下一个位置开始重复步骤1。
该算法在最坏情况下的时间复杂度为O(n*m),其中n是主字符串的长度,m是模式的长度。这意味着在最坏情况下,算法效率较低。
```c
void朴素字符串匹配算法(char *text, char *pattern) {
int n = strlen(text);
int m = strlen(pattern);
for (int i = 0; i <= n - m; i++) {
int j;
for (j = 0; j < m; j++) {
if (text[i + j] != pattern[j])
break;
}
if (j == m)
printf("Pattern found at index %d.\n", i);
}
}
```
在上述代码中,我们使用了两层嵌套循环。外层循环遍历主字符串中的每个可能的开始位置,内层循环负责执行实际的字符比较。如果在内层循环中所有字符都匹配成功,就输出模式在主字符串中的位置。
#### KMP算法
为了改善朴素字符串匹配算法的效率,D.E.Knuth、J.H.Morris和V.R.Pratt发明了KMP算法。KMP算法的显著优点是避免从头开始比较,提高了效率。
KMP算法的核心在于一个“部分匹配表”(也称为“前缀函数”或“失败函数”),它记录了模式中前后缀匹配的最长长度。该表可以用于在不匹配时,决定模式的下一个尝试位置。
```c
void部分匹配表(char *pattern, int *lps) {
int len = 0; // lps的长度
int i = 1;
lps[0] = 0; // lps[0]总是0
// 计算lps[i]的值
while (i < strlen(pattern)) {
if (pattern[i] == pattern[len]) {
len++;
lps[i] = len;
i++;
} else {
if (len != 0) {
len = lps[len - 1];
} else {
lps[i] = 0;
i++;
}
}
}
}
void KMP算法(char *text, char *pattern) {
int n = strlen(text);
int m = strlen(pattern);
int *lps = (int *)malloc(m * sizeof(int));
// 计算部分匹配表
部分匹配表(pattern, lps);
int i = 0; // text的索引
int j = 0; // pattern的索引
while (i < n) {
if (pattern[j] == text[i]) {
j++;
i++;
}
if (j == m) {
printf("Pattern found at index %d.\n", i - j);
j = lps[j - 1];
} else if (i < n && pattern[j] != text[i]) {
if (j != 0)
j = lps[j - 1];
else
i = i + 1;
}
}
free(lps);
}
```
### 哈希表的设计和冲突解决
哈希表(Hash Table)是一种通过哈希函数将键映射到表中的位置来存储数据的结构,它能够在平均常数时间内完成插入、删除和查找操作。哈希表的设计和冲突解决是其性能的关键。
#### 哈希表设计
哈希表的设计涉及以下几个关键部分:
- **哈希函数**:将键转换为数组的索引。
- **哈希表大小**:决定冲突解决策略和负载因子。
- **冲突解决方法**:当不同的键被映射到同一个数组索引时所采取的方法。
#### 冲突解决
冲突是指不同的键具有相同的哈希值。常见的冲突解决方法有:
- **开放定址法**:在发生冲突时,线性或二次探测表中的下一个空位置。
- **链表法**:在每个哈希表槽中维护一个链表,冲突的键以链表的形式存储。
哈希表的效率取决于哈希函数的质量和冲突解决策略。一个好的哈希函数应尽量减少冲突,而一个好的冲突解决策略应确保即便在高负载因子下也能保持较低的搜索时间。
```c
#define TABLE_SIZE 100
// 哈希函数
unsigned int哈希函数(int key) {
return key % TABLE_SIZE;
}
// 插入操作
void插入哈希表(HashNode *table, int key, void *data) {
int index = 哈希函数(key);
// 冲突解决使用链表
while (table[index].data != NULL && table[index].key != key) {
index = (index + 1) % TABLE_SIZE;
}
table[index].key = key;
table[index].data = data;
}
// 查找操作
void*查找哈希表(HashNode *table, int key) {
int index = 哈希函数(key);
while (table[index].data != NULL && table[index].key != key) {
index = (index + 1) % TABLE_SIZE;
}
if (table[index].data != NULL)
return table[index].data;
else
return NULL;
}
```
在上述代码中,`HashNode`是哈希表中节点的结构,我们使用链表法来解决冲突。数组索引计算后,如果该位置已被占用,我们将通过循环来寻找下一个可用位置。这里展示了如何通过哈希函数和冲突解决策略实现插入和查找操作。通过合理设计哈希表,我们能够以接近O(1)的时间复杂度进行数据的查找、插入和删除操作。
## 高级树形数据结构
### 红黑树和AVL树的比较
红黑树和AVL树都是自平衡二叉搜索树,用于存储有序的数据,支持快速查找、插入和删除操作。它们通过旋转和重新着色等操作来维护树的平衡。
#### AVL树
AVL树是一种高度平衡的二叉搜索树。AVL树中的任何节点的两个子树的高度最大差别为1,因此它也被称为高度平衡树。AVL树的特点是:
- 平衡因子(左子树高度 - 右子树高度)为-1、0或1。
- 查找效率很高,平均时间复杂度为O(log n)。
- 插入和删除操作会引起树的旋转来维持平衡。
AVL树适合读操作远多于写操作的应用场景。
#### 红黑树
红黑树则是一种弱平衡的二叉搜索树。它确保从任一节点到其每个叶子的所有路径上包含相同数目的黑色节点。红黑树的特点是:
- 平衡因子不会超过2。
- 查找、插入、删除操作的平均时间复杂度均为O(log n)。
- 插入和删除操作的调整比AVL树简单。
红黑树适合插入和删除操作较为频繁的应用场景。
#### 比较
| 特性 | AVL树 | 红黑树 |
|------------|-------------------------------|------------------------------|
| 平衡条件 | 任何节点的两个子树的高度差不超过1 | 从任一节点到叶子的所有路径上黑色节点数目相同 |
| 平衡调整 | 通过旋转(4种) | 通过旋转和颜色改变(最多3次旋转) |
| 查找性能 | 更优,因为树更高 | 稍差,但差别不大 |
| 插入/删除性能 | 较差,因为平衡调整更复杂 | 较好,因为平衡调整更简单 |
| 实现复杂性 | 更复杂 | 较简单 |
根据具体的应用场景和操作需求选择合适的树形结构是关键。如果应用主要涉及查找操作,AVL树可能更合适。如果应用更频繁地进行插入和删除操作,红黑树可能是更优的选择。
### 堆和优先队列的实现
堆(Heap)是一种特殊的完全二叉树结构,它满足堆性质:任何一个父节点的值都大于或等于(在最小堆中)或小于或等于(在最大堆中)任何一个子节点的值。堆常用于实现优先队列。
#### 堆的性质
- **完全二叉树**:除了最后一层外,每一层都被完全填满,且最后一层的节点都靠左填充。
- **堆性质**:父节点的值要么大于(最大堆)要么小于(最小堆)子节点的值。
#### 优先队列
优先队列是一种抽象数据结构,它允许插入新的对象,并且允许删除具有最高优先级的对象。堆是实现优先队列的一种方法。
#### 堆的操作
- **插入**:新元素被添加到堆的末尾,然后通过上浮操作(sift-up)来维护堆性质。
- **删除**:从堆中删除元素通常涉及删除根节点(在最小堆中是最低优先级的元素,在最大堆中是最高优先级的元素)。然后用堆的最后一个元素替换它,并通过下沉操作(sift-down)来维护堆性质。
```c
// 以最小堆为例,展示插入操作
void插入最小堆(Heap *heap, int value) {
// 添加元素到堆的末尾
heap->elements[heap->size++] = value;
// 上浮元素
int i = heap->size - 1;
while (i > 0 && heap->elements[heap->parent(i)] > heap->elements[i]) {
swap(&heap->elements[heap->parent(i)], &heap->elements[i]);
i = heap->parent(i);
}
}
// 删除最小堆的根节点
int删除最小堆根(Heap *heap) {
if (heap->size == 0)
return INT_MAX;
int root = heap->elements[0];
heap->elements[0] = heap->elements[--heap->size];
// 下沉元素
int i = 0;
while (heap->left(i) < heap->size) {
int smaller_child = heap->left(i);
if (heap->right(i) < heap->size && heap->elements[heap->right(i)] < heap->elements[smaller_child])
smaller_child = heap->right(i);
if (heap->elements[i] < heap->elements[smaller_child])
break;
swap(&heap->elements[i], &heap->elements[smaller_child]);
i = smaller_child;
}
return root;
}
```
在上述代码中,我们定义了堆的基本操作:插入和删除。插入操作通过上浮来维护最小堆的性质,而删除操作通过下沉来维护。这两个操作都保证了在删除或插入操作后,堆依然保持完全二叉树的结构和堆性质。
#### 优先队列的应用
优先队列在许多算法中都有应用,例如:
- **堆排序**:使用最大堆来实现排序。
- **图算法**:如Dijkstra和Prim算法中使用优先队列选择最小边或节点。
- **事件驱动模拟**:如离散事件模拟中,事件按照发生时间的先后顺序被提取和处理。
## 图的应用扩展
### 网络流问题的解决
网络流问题是在有向图中研究从源点到汇点的最大流量问题。在计算机网络、调度系统、运输规划等领域有广泛应用。
#### 网络流问题概述
网络流问题主要解决两个问题:
1. 如何在有向图中找到从源点到汇点的最大流量。
2. 如何找到这样的流量分布。
#### 解决方法
解决网络流问题常用的方法是Ford-Fulkerson方法,该方法通过不断增加流的容量直至找到最大流量为止。具体步骤如下:
1. 初始化流量为0。
2. 找到一条从源点到汇点的路径,这条路径上的边都有尚未使用的容量。
3. 在这条路径上增加尽可能多的流量。
4. 重复步骤2和3直到无法找到这样的路径为止。
Ford-Fulkerson方法的关键在于寻找增广路径,这可以通过深度优先搜索(DFS)或广度优先搜索(BFS)实现。
```c
// 伪代码,展示Ford-Fulkerson方法的流程
Ford-Fulkerson(图 G, 源点 s, 汇点 t) {
流量 f = 0;
while (存在增广路径p从s到t) {
// 增广路径上的最小残余容量
int b = min残余容量(p);
// 更新流量
f += b;
// 更新边上的流量和残余容量
更新G的流量和残余容量(b, p);
}
return f;
}
```
#### 应用
网络流问题的应用场景:
- **计算机网络**:数据包路由,寻找最大吞吐量。
- **运输规划**:道路或铁路系统中运输车辆的最大流量。
- **物流**:货物的最大运输量。
### 社交网络分析中的图算法
社交网络分析是研究社交关系、群体结构和传播过程的领域。它利用图算法对社交网络中的各种关系进行分析。
#### 社交网络的图表示
社交网络可以用无向图表示,其中节点代表个体,边代表个体之间的关系(如朋友关系)。
#### 关键图算法
在社交网络分析中,以下图算法尤其重要:
- **中心性分析**:度中心性、接近中心性、中介中心性等,用于确定节点在社交网络中的重要性。
- **社区检测**:将网络分解为小的社区,其中社区内成员间的联系比社区间更紧密。
- **影响力最大化**:识别关键节点,它们可以最大化信息在网络中的传播。
#### 应用
图算法在社交网络分析中的应用:
- **关系推荐**:通过图算法找到个体之间的潜在联系。
- **群体动态**:分析群体中的影响力和领导力。
- **信息传播**:优化广告或信息在社交网络中的传播路径。
通过深入探讨字符串匹配算法、哈希表设计、红黑树与AVL树以及图的应用扩展,我们可以看到数据结构在解决实际问题中的强大作用。在下一章节中,我们将继续探索数据结构在编程实践中的应用,如排序和搜索算法、数据结构在系统设计中的角色以及数据结构与算法优化的策略。
# 4. 数据结构在编程实践中的应用
### 4.1 排序和搜索算法
在编程中,排序和搜索是频繁进行的操作。理解不同排序和搜索算法的特点及其适用场景是十分重要的。
#### 4.1.1 常见排序算法的比较与选择
排序算法的效率会直接影响到整个程序的性能,所以选择一个合适的排序算法是优化的关键一步。比较几种常见的排序算法:
- **冒泡排序(Bubble Sort)**:通过重复交换相邻的元素,如果它们的顺序错误。它的时间复杂度为O(n^2),适用于小数据量的排序。
- **快速排序(Quick Sort)**:通过选择一个"基准"元素,将数组分为两部分,一部分都比基准小,另一部分都比基准大,然后递归排序。它的平均时间复杂度为O(n log n),但最坏情况为O(n^2)。
- **归并排序(Merge Sort)**:通过递归地将数组分成两半,分别排序,然后将结果合并起来。它的时间复杂度稳定为O(n log n)。
- **堆排序(Heap Sort)**:将无序的列表构造成一个最大堆,然后重复地移除堆顶元素,并重新调整堆结构。时间复杂度也是O(n log n)。
选择排序算法时,需要考虑数据规模、数据分布、稳定性等因素。例如,对于大数据集,归并排序或堆排序可能是更好的选择,因为它们的时间复杂度是固定的。快速排序在大多数情况下表现良好,但在最坏情况下性能会退化。而冒泡排序通常只适用于教学和小规模数据的简单应用。
下面是一个快速排序的Python实现示例:
```python
def quicksort(arr):
if len(arr) <= 1:
return arr
pivot = arr[len(arr) // 2]
left = [x for x in arr if x < pivot]
middle = [x for x in arr if x == pivot]
right = [x for x in arr if x > pivot]
return quicksort(left) + middle + quicksort(right)
# 示例数组
array = [3, 6, 8, 10, 1, 2, 1]
print(quicksort(array))
```
在这个代码块中,我们定义了一个递归函数`quicksort`,它接受一个数组作为输入,并返回排序后的数组。排序过程中,我们选择了一个基准值(pivot),将数组分为小于、等于和大于基准值的三部分。然后递归地对小于和大于基准值的部分进行排序。
#### 4.1.2 二分搜索和其变种的实现
二分搜索是一种在有序数组中查找特定元素的高效算法。其基本思想是将目标值与数组中间的元素比较,从而减半搜索范围。二分搜索的时间复杂度为O(log n),适合于大数据量的查找。
以下是二分搜索的Python实现:
```python
def binary_search(arr, x):
low = 0
high = len(arr) - 1
mid = 0
while low <= high:
mid = (high + low) // 2
if arr[mid] < x:
low = mid + 1
elif arr[mid] > x:
high = mid - 1
else:
return mid
return -1
# 示例数组
array = [1, 2, 3, 4, 5, 6, 7, 8, 9]
x = 5
print(binary_search(array, x)) # 输出索引
```
在这个代码块中,`binary_search`函数接受一个有序数组`arr`和一个要查找的值`x`。通过计算中间位置`mid`,比较中间元素与目标值的大小,不断缩小搜索范围,直到找到目标值或范围为空。
二分搜索还有许多变种,例如在旋转排序数组中查找元素,或在查找第一个和最后一个出现的位置等,这些变种都有其特定的使用场景。
### 4.2 数据结构在系统设计中的角色
系统设计往往涉及对数据结构的精心选择和优化,以应对各种各样的数据处理需求。
#### 4.2.1 缓存策略中的数据结构选择
缓存是系统设计中常见的优化策略,能够加快数据访问速度,减少对后端存储的依赖。缓存的实现依赖于合适的数据结构。
- **LRU(Least Recently Used)缓存**:可以使用哈希表与双链表结合的方式实现。哈希表用于O(1)时间复杂度的查找,而双链表用于维护使用顺序,以O(1)时间复杂度移除最长时间未被访问的元素。
- **LFU(Least Frequently Used)缓存**:这种缓存策略需要记录元素的访问频率。可以使用哈希表记录键值对,再结合一个最小堆来记录频率,实现O(log k)时间复杂度的频率更新和O(1)时间复杂度的查找。
下面是一个LRU缓存策略的Python实现示例:
```python
from collections import OrderedDict
class LRUCache(OrderedDict):
def __init__(self, capacity):
super().__init__()
self.capacity = capacity
def get(self, key):
if key not in self:
return -1
self.move_to_end(key)
return self[key]
def put(self, key, value):
if key in self:
self.move_to_end(key)
self[key] = value
if len(self) > self.capacity:
self.popitem(last=False)
# 示例
cache = LRUCache(2) # 容量为2
cache.put(1, 1)
cache.put(2, 2)
print(cache.get(1)) # 返回 1
cache.put(3, 3) # 2被挤出
print(cache.get(2)) # 返回 -1 (未找到)
cache.put(4, 4) # 1和3被挤出
print(cache.get(1)) # 返回 -1 (未找到)
print(cache.get(3)) # 返回 3
print(cache.get(4)) # 返回 4
```
在这个代码块中,`LRUCache`类继承自`OrderedDict`,我们重写了`get`和`put`方法来实现LRU缓存策略。当元素被访问时,使用`move_to_end`方法将其移动到链表末尾。当插入新元素时,如果缓存已满,则移除最早插入的元素。
#### 4.2.2 大数据处理框架中的数据结构应用
大数据处理框架如Hadoop和Spark等,它们在内部优化和数据结构的选择上非常重视效率。使用特定的数据结构可以优化内存管理、提高数据处理速度。
- **弹性分布式数据集(RDD)**:Spark使用RDD作为其主要的数据处理抽象,它是一种不可变、分布式的元素集合。每个RDD可以分布在集群的多个节点上,执行并行操作。
- **数据分区(Partitioning)**:合理地对数据进行分区可以显著提高并行处理的效率。Spark和Hadoop都允许用户自定义分区器,以优化数据的分布和处理。
下面是一个简单的Spark RDD的使用示例:
```python
from pyspark import SparkContext
sc = SparkContext()
rdd = sc.parallelize([1, 2, 3, 4, 5])
def square(x):
return x * x
rdd2 = rdd.map(square)
print(rdd2.collect()) # [1, 4, 9, 16, 25]
```
在这个代码块中,我们创建了一个`SparkContext`实例,并创建了一个包含5个元素的RDD。通过`map`操作,我们对每个元素执行平方运算。最终,使用`collect`方法获取结果,并打印输出。
### 4.3 数据结构与算法优化
性能优化是编程实践中的核心问题,良好的数据结构是实现优化的基础。
#### 4.3.1 空间复杂度和时间复杂度分析
分析算法的空间复杂度和时间复杂度是确定其效率的重要依据。一个算法的空间复杂度是指执行算法所需要的存储空间大小,而时间复杂度是指执行算法所需要的计算时间。
例如,快速排序的时间复杂度通常为O(n log n),但在最坏情况下会退化到O(n^2)。而空间复杂度通常取决于算法中临时变量的数量和递归调用的深度。
- **空间换时间**:在某些情况下,可以通过增加额外的存储空间来减少算法的执行时间,例如在排序操作中使用额外的数组来存储临时数据。
- **时间换空间**:在需要节省内存的情况下,可以通过重复计算来减少存储空间的使用。
#### 4.3.2 算法优化技巧和案例分析
为了优化算法性能,开发者通常会采取各种技巧:
- **尾递归优化**:对于递归算法,可以改写为尾递归形式,以减少递归调用栈的深度,这有助于节省内存空间。
- **分治法**:将大问题分解为小问题,解决后合并结果。分治法可以将复杂问题转化为易处理的问题。
- **动态规划**:利用算法的子问题重叠特性,存储已经解决的子问题的解,避免重复计算。
下面是一个动态规划解决斐波那契数列的示例:
```python
def fibonacci(n):
cache = [0] * (n + 1)
cache[1] = 1
for i in range(2, n + 1):
cache[i] = cache[i - 1] + cache[i - 2]
return cache[n]
print(fibonacci(10)) # 输出第10个斐波那契数
```
在这个代码块中,我们使用了一个列表`cache`来存储已经计算过的斐波那契数,避免了重复计算。这种方法利用了动态规划的思想,显著提高了算法效率。
通过这些优化技术,可以在实际编程中显著提高程序性能。在不同的问题场景下,选择合适的数据结构和算法优化策略是系统设计和开发的关键。
# 5. 数据结构面试题解析
## 5.1 常见数据结构面试题
### 5.1.1 实现经典数据结构的问题
在编程面试中,面试官经常要求面试者现场实现一些经典的数据结构。这不仅考察编程技能,更考察对数据结构本质理解和细节掌握。
以实现一个简单的链表为例,需要面试者不仅能够写出代码,还需要对指针操作、内存分配等底层细节非常清楚。
```c
struct ListNode {
int val;
struct ListNode *next;
};
struct ListNode* createNode(int val) {
struct ListNode* newNode = (struct ListNode*)malloc(sizeof(struct ListNode));
if (newNode == NULL) {
return NULL;
}
newNode->val = val;
newNode->next = NULL;
return newNode;
}
```
面试者在实现时需要注意内存管理,避免内存泄漏。对于每个操作,如插入、删除节点,都需要仔细考虑边界条件和错误处理。例如在删除节点时,要确保正确释放内存,并维护好其他节点之间的关系。面试者应该清晰地向面试官描述每一个步骤的实现逻辑。
### 5.1.2 数据结构相关算法面试题
面试者除了需要实现数据结构之外,往往还需要根据数据结构编写相关的算法题。例如,利用二叉树数据结构实现一个二叉搜索树的中序遍历。
```c
void inorderTraversal(struct TreeNode* root) {
if (root == NULL) return;
inorderTraversal(root->left);
printf("%d ", root->val);
inorderTraversal(root->right);
}
```
在解决这类问题时,面试者需要注意算法的效率和正确性。例如,在二叉搜索树的遍历中,面试者应该理解中序遍历的时间复杂度为O(n),且能够解释每个节点只访问一次的原因。面试者应该能够展示对算法空间和时间复杂度的深刻理解,并且能够提供算法的优化策略,例如迭代替代递归以避免栈溢出。
## 5.2 面试题解题思路与技巧
### 5.2.1 分析题目要求和解题步骤
面试时,正确理解题目的要求至关重要。面试者应该先分析题目,理解所需数据结构的特性,以及算法要解决的核心问题。
以实现一个散列表为例,面试者需要先分析散列表的用例场景和基本操作,然后确定如何处理冲突(如链表法或开放寻址法),最后编写出如插入、删除、查找等基本操作的代码。
```c
#define TABLE_SIZE 1000
struct HashTableEntry {
int key;
int value;
struct HashTableEntry *next;
};
struct HashTable {
struct HashTableEntry* entries[TABLE_SIZE];
};
unsigned int hash(int key) {
return key % TABLE_SIZE;
}
void insert(struct HashTable* table, int key, int value) {
unsigned int index = hash(key);
struct HashTableEntry* entry = table->entries[index];
struct HashTableEntry* prevEntry = NULL;
while (entry != NULL) {
if (entry->key == key) {
entry->value = value;
return;
}
prevEntry = entry;
entry = entry->next;
}
struct HashTableEntry* newEntry = (struct HashTableEntry*)malloc(sizeof(struct HashTableEntry));
newEntry->key = key;
newEntry->value = value;
newEntry->next = NULL;
if (prevEntry == NULL) {
table->entries[index] = newEntry;
} else {
prevEntry->next = newEntry;
}
}
```
在实际编码过程中,面试者要确保代码的鲁棒性,例如检查内存分配是否成功,以及在插入新节点时更新链表指针。面试者应该学会用自然语言描述代码的逻辑,并能够解释每一个重要的步骤。
### 5.2.2 面试官视角下的解题要点
面试官通常更关注面试者的问题解决能力,而不是单纯地记忆数据结构和算法。
在面试过程中,面试者应该展示出清晰的解题思路,合理地分解问题,逐步推进解决方案的实现。例如,在解决图算法问题时,先从简单的情况入手,例如假设图是有向无环图,然后逐步引入新的条件,如增加节点,再增加边等。
面试者在解决每一个子问题后,都应该与面试官进行沟通,确认解决方法的正确性。这样的互动不仅能够帮助面试者得到即时反馈,同时也能让面试官看到面试者清晰的思考过程。
面试者在面试中还应该学会从面试官的提问中提取隐藏信息,例如面试官询问“能否优化这个算法的性能?”,可能是在考察面试者对时间复杂度和空间复杂度的理解。在给出解决方案时,面试者应该结合实际应用场景给出合理化的建议,并解释优化的动机与效果。
## 5.3 面试准备与案例分享
### 5.3.1 面试准备策略和心态调整
准备数据结构面试时,面试者需要有明确的策略。首先,应该对常用的数据结构和算法有深入的理解,并通过编写代码来熟练应用它们。其次,面试者需要学会如何分析问题,并且能够灵活地将理论知识应用于实际问题。
面试者应该积极准备,并通过模拟面试来适应面试环境。这包括熟悉面试流程,了解不同公司可能问到的问题类型,以及准备一些常见的面试问题的回答。
此外,保持良好的心态同样重要。面试者应该保持自信,同时也要有接受失败的勇气。面对难题时,面试者应该展现出积极思考和不放弃的态度。
### 5.3.2 面试中的数据结构案例解析
在面试中,面试官可能会给出具体的案例,要求面试者分析问题并提供解决方案。
例如,面试官可能会问:“如何设计一个LRU(最近最少使用)缓存机制?”这是一个考察数据结构实际应用能力的问题,要求面试者不仅了解数据结构,还要理解缓存替换策略。
```c
struct Node {
int key;
int value;
struct Node *next;
struct Node *prev;
};
struct DLinkedList {
struct Node *head;
struct Node *tail;
};
void addNode(struct DLinkedList *list, struct Node *node) {
node->next = list->head->next;
node->prev = list->head;
list->head->next->prev = node;
list->head->next = node;
}
void moveToHead(struct DLinkedList *list, struct Node *node) {
// Similar to removeNode(), followed by addNode()
}
void removeNode(struct DLinkedList *list, struct Node *node) {
struct Node *prev = node->prev;
struct Node *next = node->next;
prev->next = next;
next->prev = prev;
}
struct LRUCache {
int capacity;
struct DLinkedList *list;
unordered_map<int, struct Node*> map;
};
void set(struct LRUCache *cache, int key, int value) {
struct Node *node = cache->map[key];
if (node == NULL) {
node = (struct Node*)malloc(sizeof(struct Node));
node->key = key;
node->value = value;
addNode(&cache->list, node);
cache->map[key] = node;
if (cache->list->size > cache->capacity) {
struct Node *tail = cache->list->tail;
removeNode(&cache->list, tail);
cache->map.erase(tail->key);
free(tail);
}
} else {
node->value = value;
moveToHead(&cache->list, node);
}
}
int get(struct LRUCache *cache, int key) {
struct Node *node = cache->map[key];
if (node == NULL) {
return -1;
}
moveToHead(&cache->list, node);
return node->value;
}
```
在这个问题中,面试者需要展示对双向链表和哈希表的结合使用,以及对LRU策略的理解。面试者应该解释代码中的每一行,确保面试官明白代码的逻辑。面试者还需要指出在实现中考虑的各种边界条件和潜在的错误处理,以及代码如何达到O(1)时间复杂度来访问最近最少使用的元素。
面试者应该利用具体案例的分析来展示自己的分析能力和编程技巧,同时向面试官传达自己对问题的深刻理解。
# 6. 数据结构研究前沿与未来展望
在信息技术飞速发展的今天,数据结构的研究不仅仅局限于传统概念和实现,它在新兴领域如分布式系统、机器学习和量子计算等领域扮演着越来越重要的角色。接下来,我们将探讨数据结构在这些领域的研究前沿和未来的发展趋势。
## 6.1 新兴数据结构研究
### 6.1.1 分布式数据结构的新挑战
随着云计算和大数据时代的到来,分布式系统已经成为了构建大规模应用的基石。在分布式环境中,数据结构面临许多新挑战,如数据一致性的保证、分布式事务处理、以及系统容错能力的提升。传统数据结构往往假设在单一内存空间内进行操作,而在分布式系统中,数据可能分布在不同节点上,这要求数据结构必须适应网络延迟、分区容错等分布式特性。
例如,分布式哈希表(Distributed Hash Table, DHT)就是为了解决分布式环境中的数据映射问题而设计的。DHT能够在任意节点加入或离开时,快速重新分配数据,保证了系统的高效和稳定。此外,一致性哈希算法也在分布式缓存系统中广泛应用,以减少节点变化时对系统性能的影响。
```mermaid
graph LR
A[客户端] -->|写操作| B(一致性哈希环)
B --> C{定位节点}
C -->|节点1| D[节点1]
C -->|节点2| E[节点2]
C -->|节点3| F[节点3]
```
如上图所示,一致性哈希环将数据映射到不同的节点上,当有节点加入或离开时,只有部分数据需要重新分配,大大降低了系统重新平衡的成本。
### 6.1.2 数据结构在机器学习中的应用
机器学习模型通常需要处理大量数据,高效的数据结构对于提升算法性能至关重要。例如,在推荐系统中,经常使用索引树(如Trie树)来加速对用户历史记录的检索;在图像识别中,空间数据结构如KD树用于快速查询和分类数据点;在自然语言处理中,字典树(Trie)结构可以用来优化字符串匹配过程。
在未来,数据结构的研究将更加紧密地与机器学习技术相结合,如何设计能够适应机器学习特点的数据结构,如何在数据结构中嵌入机器学习模型以提升算法效率等问题,都将成为研究的热点。
## 6.2 数据结构的未来发展趋势
### 6.2.1 计算模型的演变对数据结构的影响
随着非冯·诺依曼计算模型的发展,例如量子计算、神经形态计算,传统的数据结构可能无法直接应用或者需要进行根本性的变革。例如,在量子计算中,量子比特(qubits)的叠加态和纠缠态为数据的存储和处理提供了全新的可能性。量子比特的这种特性将引导研究者们开发全新的量子数据结构,如量子数组和量子树,以及新的算法逻辑来实现量子并行计算。
### 6.2.2 数据结构在量子计算中的角色预览
量子数据结构和算法是量子计算领域的重要组成部分,它们对于实现高效量子计算至关重要。以量子图算法为例,传统图算法在量子世界中可以被重新构造,以利用量子叠加态的特性来同时处理大量的图节点,从而实现加速。在数据结构方面,研究者们正在尝试构建适用于量子计算机的数据结构,如量子位向量、量子树和量子图等,以便能够在量子层面上实现高效的信息组织和检索。
通过这些研究,我们可以预见未来数据结构将不仅限于经典计算领域,它将在新兴计算模型中扮演核心角色,推动计算能力的飞跃发展。
在接下来的章节中,我们将总结并展望数据结构的研究方向,并提出对当前和未来数据结构研究的建议。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
清华大学严蔚敏教授倾情打造的数据结构专栏,为您提供全面的数据结构知识体系。专栏涵盖了从基础到高级的数据结构,包括链表、数组、二叉树、图论、哈希表、数据库索引、平衡二叉树、最小生成树算法、排序算法、动态规划、贪心算法、分治法、图的遍历算法、字符串匹配算法、线段树和树状数组等。通过深入浅出的讲解和丰富的实战案例,专栏将帮助您掌握最实用的数据结构技巧和原理,解决复杂的数据管理问题,在数据结构领域脱颖而出。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【统计分析的终极武器】:最小二乘法的全面解析与案例实战

# 摘要
最小二乘法是一种广泛应用于数据统计分析的数学优化技术,用于估计模型参数并最小化误差的平方和。本论文首先回顾了最小二乘法的理论基础和数学原理,包括线性回归分析、损失函数
西门子伺服技术精讲:掌握V90 PN伺服控制字与状态字的实战技巧
# 摘要
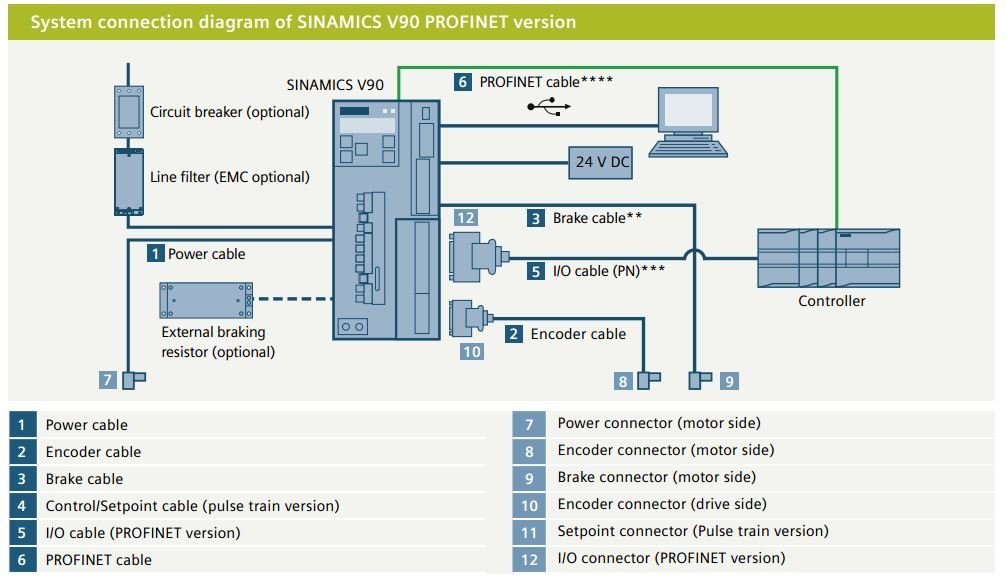
本文系统地介绍了西门子V90 PN伺服技术,包括控制字与状态字的深入解析、实际应用和故障处理。首先概述了伺服技术与V90 PN伺服的基本知识,随后详细阐述了控制字的理论基础和编程实践,以及状态字在故障诊断中的应用。通过实战技巧章节,本文还提供了现场调试、参数优化和问题解决的具体方法。最
【Ubuntu Mini.iso进阶技巧】:解决安装常见问题的4大秘诀
# 摘要
Ubuntu Mini.iso作为一个精简的Linux发行版镜像,为用户提供了一个轻量级的安装选项,特别适用于需要快速部署系统的场景。本文首先对Ubuntu Mini.iso的基本概念和安装基础进行了介绍,并深入分析了其文件系统结构和安装流程。随后,文章详细探讨了安装过程中可能遇到的各类问题及其理论背景,并提供了相应的解决方法。进阶技巧章节分享了如何通过脚本自动化安装、系
深度解析SRecord工具集:专家揭秘srec_cat、srec_cmp、srec_info的高级使用技巧

# 摘要
本文深入介绍SRecord工具集,包括其基础功能、高级用法和核心功能。通过探讨srec_cat的命令结构和数据转换应用,srec_cmp的对比原理和固件校验技巧,以及srec_info的用户交互和信息提取技术,本文展示了如何在嵌入式开发中高效整合使用这些工具。同时,本文提供了实战演练案例,分析了在整合应用中遇到的高级问题及解决方案,并对SRecord工具集的未来改进方向进行展望,强
MIMO与OFDM深度解析:掌握3GPP TS 36.413的关键技术

# 摘要
本文对MIMO和OFDM技术进行了全面的概述,并深入探讨了其工作原理、性能评估、关键技术以及结合应用。首先介绍了MIMO技术的基本原理、分类和性能评估方法,接着分析了O
KISTLER 5847技术秘籍:零基础也能精通的术语与应用
# 摘要
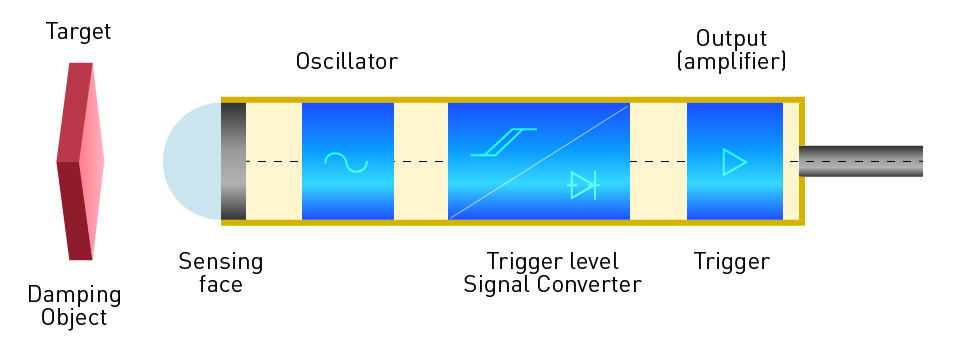
KISTLER 5847传感器因其在测量精度和应用范围上的优势而被广泛使用。本文首先对KISTLER 5847传感器进行概述,然后详细分析其核心原理与技术,包括压电效应的理论基础、传感器工作机制以及校准与性能优化方法。接着,探讨了该传感器在工业、科研和环境监测等不同领域的日常应用,突出其在材料测试、产品质量控制和动态过程监测中的重要性。此外,文章还提供了
【PreScan Viewer高级技能提升】:视频输出质量优化,专家级进阶教程!
# 摘要
本文系统性地介绍了PreScan Viewer在视频质量优化中的应用,重点探讨了视频输出质量的理论基础和实践操作技巧。首先,概述了视频编码技术及其效率和质量的权衡原则,接着分析了信号处理技术在视频压缩中的应用,以及视频质量评估的主观与客观标准。文章接着介绍了PreScan Viewer的界面详解、高级视频预处理技术应用和高效视频输出设置。进
MSP430F5529软件编程全攻略:C语言到汇编,效率翻倍!

# 摘要
本文旨在全面介绍MSP430F5529微控制器的基础知识、开发环境搭建以及其在嵌入式系统中的应用。首先,文章回顾了C语言编程的基础,并探讨了如何在MSP430F5529开发环境中进行工程配置和构建。接着,深入分析了MSP430F5529的寄存器架构和硬件特性,提供了外设模块的编程细节,包括定时器、ADC/DAC转换以及通信接口的高级应用。此外,文章详细阐述
【COM Express操作系统选择】:如何挑选最适合您模块的操作系统
# 摘要
本文综合分析了COM Express模块的操作系统选择问题,从理论基础、实践方法到案例分析,系统地探讨了操作系统的选择和实施过程。首先介绍了COM Express模块的基本概念和特点,然后深入讨论了操作系统选择的理论基础,包括不同操作系统的分类、硬件兼容性、系统稳定性及安全性要求。在实践方法章节,本文关注了需求分析、社区支持评
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )