STM32单片机编程软件底层原理:深入剖析核心技术
发布时间: 2024-07-01 19:54:04 阅读量: 111 订阅数: 39 

# 1. STM32单片机架构和编程环境
STM32单片机是一款基于ARM Cortex-M内核的微控制器,广泛应用于嵌入式系统开发。其架构主要包括处理器、存储器、外设和总线。
在编程环境方面,STM32单片机支持多种开发工具,如IAR Embedded Workbench、Keil MDK和GCC。这些工具提供编译器、调试器和仿真器,帮助开发者快速高效地开发和调试程序。
# 2. STM32单片机软件开发流程
### 2.1 软件开发流程概述
STM32单片机软件开发流程一般遵循以下步骤:
1. **需求分析:**确定项目需求,包括功能、性能、接口等。
2. **硬件设计:**设计硬件电路,包括MCU选型、外围器件选择、电路连接等。
3. **软件设计:**编写软件代码,包括功能实现、算法设计、数据结构等。
4. **编译:**使用编译器将代码编译成可执行文件(二进制文件)。
5. **下载:**将可执行文件下载到MCU中。
6. **调试:**使用调试工具对软件进行调试,查找并修复错误。
7. **测试:**对软件进行测试,验证其功能和性能是否满足需求。
8. **发布:**将软件发布到实际应用中。
### 2.2 硬件抽象层(HAL)
硬件抽象层(HAL)是STM32单片机软件开发中的一项重要技术,它提供了对底层硬件的统一访问接口。HAL库由STM32官方提供,它封装了不同STM32系列MCU的底层寄存器操作,简化了软件开发过程。
使用HAL库,开发者可以专注于应用层代码的编写,而无需关心底层硬件的具体细节。HAL库提供了以下优势:
- **代码移植性:**HAL库支持所有STM32系列MCU,使得代码可以在不同MCU之间轻松移植。
- **代码可读性:**HAL库使用标准C语言函数,代码可读性好,易于理解和维护。
- **代码效率:**HAL库经过优化,可以提高代码执行效率。
### 2.3 中间件和操作系统
STM32单片机支持多种中间件和操作系统,它们提供了丰富的功能和服务,可以简化软件开发过程。
**中间件:**
- **FreeRTOS:**一款免费且开源的实时操作系统,提供了任务管理、同步、通信等功能。
- **LwIP:**一款轻量级的TCP/IP协议栈,支持网络通信。
- **FatFS:**一款文件系统,支持文件读写操作。
**操作系统:**
- **μC/OS-II:**一款商业化的实时操作系统,提供了更丰富的功能和服务。
- **VxWorks:**一款高性能的实时操作系统,广泛应用于工业控制领域。
选择合适的中间件或操作系统可以根据项目的具体需求和资源限制来确定。
# 3. STM32单片机核心模块分析
### 3.1 时钟系统
**概述**
时钟系统是STM32单片机的核心模块之一,负责为整个系统提供稳定的时钟信号。STM32单片机的时钟系统由多个时钟源和分频器组成,可以提供多种频率的时钟信号。
**时钟源**
STM32单片机有多个时钟源,包括:
- **HSI(内部高速振荡器)**:内部振荡器,提供约8MHz的时钟频率。
- **HSE(外部高速振荡器)**:外部晶振或陶瓷谐振器,提供更高的时钟频率(通常为8MHz或16MHz)。
- **LSI(内部低速振荡器)**:内部振荡器,提供约32kHz的低速时钟频率。
- **LSE(外部低速振荡器)**:外部32.768kHz晶振,用于时钟同步和低功耗模式。
**分频器**
时钟源的频率可以通过分频器进行分频,以获得所需的时钟频率。STM32单片机有多个分频器,包括:
- **PLL(锁相环)**:可以将时钟源的频率倍频或分频。
- **AHB分频器**:将PLL输出的时钟频率分频为AHB总线时钟频率。
- **APB1分频器**:将AHB总线时钟频率分频为APB1总线时钟频率。
- **APB2分频器**:将AHB总线时钟频率分频为APB2总线时钟频率。
**时钟树**
STM32单片机的时钟树是一个分层结构,从时钟源开始,经过分频器,最终为系统中的各个外设提供时钟信号。时钟树可以根据需要进行配置,以满足不同的应用需求。
**代码示例**
```c
// 配置时钟系统
SystemClock_Config();
// 获取系统时钟频率
uint32_t SystemCoreClock = HAL_RCC_GetSysClockFreq();
```
**参数说明**
- `SystemClock_Config()`:配置时钟系统的函数。
- `HAL_RCC_GetSysClockFreq()`:获取系统时钟频率的函数。
### 3.2 中断系统
**概述**
中断系统是STM32单片机处理外部事件和异常的机制。STM32单片机有多个中断源,可以触发中断请求。中断请求被优先级控制器处理,根据优先级决定哪个中断请求被响应。
**中断源**
STM32单片机有多个中断源,包括:
- **外部中断**:由外部引脚上的信号触发。
- **内部中断**:由内部外设或事件触发,例如定时器溢出或数据传输完成。
- **NMI(非屏蔽中断)**:最高优先级的中断,不能被屏蔽。
**中断控制器**
中断控制器负责管理中断请求。STM32单片机有多个中断控制器,包括:
- **NVIC(嵌套向量中断控制器)**:负责处理所有中断请求,并根据优先级决定哪个中断请求被响应。
- **EXTI(外部中断控制器)**:负责处理外部中断请求。
**中断处理**
当一个中断请求被响应时,STM32单片机会执行相应的中断服务程序(ISR)。ISR是负责处理中断事件的代码段。ISR可以执行各种操作,例如读取输入数据、设置输出引脚或调用其他函数。
**代码示例**
```c
// 定义中断服务程序
void EXTI0_IRQHandler(void)
{
// 处理外部中断0事件
HAL_GPIO_TogglePin(GPIOA, GPIO_PIN_5);
}
// 启用外部中断0
HAL_NVIC_EnableIRQ(EXTI0_IRQn);
```
**参数说明**
- `EXTI0_IRQHandler()`:外部中断0的中断服务程序。
- `HAL_GPIO_TogglePin()`:切换GPIO引脚状态的函数。
- `HAL_NVIC_EnableIRQ()`:启用中断的函数。
### 3.3 GPIO(通用输入/输出)
**概述**
GPIO(通用输入/输出)是STM32单片机上用于控制外部引脚的模块。GPIO引脚可以配置为输入、输出或模拟功能。GPIO模块提供了灵活的引脚控制,可以用于各种应用,例如读取开关状态、控制LED或与外部设备通信。
**GPIO引脚**
STM32单片机有多个GPIO端口,每个端口包含多个GPIO引脚。GPIO引脚可以配置为以下功能:
- **输入**:读取外部信号。
- **输出**:控制外部设备。
- **模拟**:连接到模拟外设,例如ADC或DAC。
**GPIO寄存器**
GPIO模块的配置和控制通过GPIO寄存器进行。主要寄存器包括:
- **MODER(模式寄存器)**:配置GPIO引脚的模式(输入、输出或模拟)。
- **OTYPER(输出类型寄存器)**:配置GPIO引脚的输出类型(推挽或开漏)。
- **OSPEEDR(输出速度寄存器)**:配置GPIO引脚的输出速度(低速、中速或高速)。
- **PUPDR(上拉/下拉寄存器)**:配置GPIO引脚的上拉或下拉电阻。
**代码示例**
```c
// 配置GPIO引脚PA5为输出模式
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Pin = GPIO_PIN_5;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
// 设置GPIO引脚PA5为高电平
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_SET);
```
**参数说明**
- `GPIO_InitTypeDef`:GPIO初始化结构体。
- `HAL_GPIO_Init()`:初始化GPIO引脚的函数。
- `HAL_GPIO_WritePin()`:设置GPIO引脚电平的函数。
### 3.4 定时器
**概述**
定时器是STM32单片机上用于生成精确时序的模块。STM32单片机有多个定时器,每个定时器都可以配置为不同的模式和功能。定时器可以用于各种应用,例如生成脉冲、测量时间间隔或创建PWM信号。
**定时器模式**
STM32单片机上的定时器可以配置为以下模式:
- **向上计数模式**:定时器从0开始计数,直到达到最大值。
- **向下计数模式**:定时器从最大值开始计数,直到达到0。
- **中心对齐模式**:定时器从最大值的一半开始计数,向上或向下计数到0或最大值。
**定时器功能**
定时器可以配置各种功能,包括:
- **捕获/比较**:捕获外部信号或比较定时器计数器值。
- **PWM(脉冲宽度调制)**:生成可变占空比的脉冲信号。
- **输入捕获**:捕获外部信号的上升沿或下降沿。
- **输出比较**:当定时器计数器值与比较值匹配时生成输出脉冲。
**代码示例**
```c
// 配置定时器2为向上计数模式
TIM_HandleTypeDef htim2;
htim2.Instance = TIM2;
htim2.Init.Prescaler = 1000;
htim2.Init.Period = 1000;
htim2.Init.Mode = TIM_COUNTERMODE_UP;
HAL_TIM_Init(&htim2);
// 启动定时器2
HAL_TIM_Base_Start(&htim2);
```
**参数说明**
- `TIM_HandleTypeDef`:定时器句柄结构体。
- `HAL_TIM_Init()`:初始化定时器的函数。
- `HAL_TIM_Base_Start()`:启动定时器的函数。
# 4. STM32单片机高级特性应用
### 4.1 DMA(直接存储器访问)
DMA(直接存储器访问)是一种硬件特性,允许外设直接访问内存,而无需CPU干预。这可以显著提高数据传输速度,特别是在处理大量数据时。
**4.1.1 DMA的工作原理**
DMA控制器通过以下步骤执行数据传输:
1. 配置DMA通道,指定源地址、目标地址、数据长度和其他参数。
2. 启动DMA传输。
3. DMA控制器在后台处理数据传输,无需CPU干预。
4. 传输完成后,DMA控制器触发中断,通知CPU。
**4.1.2 DMA的优势**
* **提高数据传输速度:**DMA可以显著提高数据传输速度,特别是在处理大量数据时。
* **降低CPU负载:**DMA可以释放CPU资源,使其可以专注于其他任务。
* **提高系统效率:**DMA可以提高系统效率,因为它允许外设直接访问内存,而无需CPU干预。
**4.1.3 DMA的应用**
DMA在各种应用中都有用,包括:
* 数据缓冲
* 数据流
* 外设通信
### 4.2 ADC(模数转换器)
ADC(模数转换器)是一种硬件特性,允许将模拟信号(如电压或电流)转换为数字信号。这对于处理来自传感器或其他模拟设备的数据非常有用。
**4.2.1 ADC的工作原理**
ADC通过以下步骤执行模数转换:
1. 对模拟信号进行采样。
2. 将采样值转换为数字信号。
3. 将数字信号存储在寄存器中。
**4.2.2 ADC的优势**
* **将模拟信号转换为数字信号:**ADC允许将模拟信号转换为数字信号,以便计算机或微控制器可以处理它们。
* **高精度:**现代ADC可以提供高精度,这对于精确测量非常重要。
* **广泛的应用:**ADC在各种应用中都有用,包括:
* 数据采集
* 过程控制
* 医疗设备
### 4.3 USART(通用异步收发器)
USART(通用异步收发器)是一种硬件特性,允许与其他设备进行串行通信。这对于与外部设备(如显示器、传感器或其他微控制器)进行通信非常有用。
**4.3.1 USART的工作原理**
USART通过以下步骤执行串行通信:
1. 将数据转换为串行位流。
2. 将串行位流发送到传输线。
3. 接收来自接收线的串行位流。
4. 将串行位流转换为数据。
**4.3.2 USART的优势**
* **串行通信:**USART允许与其他设备进行串行通信,这需要较少的引脚。
* **灵活的配置:**USART可以灵活配置,以满足不同的通信需求。
* **广泛的应用:**USART在各种应用中都有用,包括:
* 调试
* 数据传输
* 设备控制
# 5. STM32单片机项目实战
本节将通过三个实际项目,带领大家深入了解STM32单片机的应用和编程技巧。
### 5.1 LED闪烁程序
**硬件连接:**
* STM32单片机
* LED灯
* 100Ω电阻
**代码实现:**
```c
#include "stm32f10x.h"
int main() {
// 初始化时钟系统
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);
// 初始化GPIOC第13位为输出模式
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
while (1) {
// 点亮LED灯
GPIO_SetBits(GPIOC, GPIO_Pin_13);
// 延时500ms
for (int i = 0; i < 500000; i++);
// 熄灭LED灯
GPIO_ResetBits(GPIOC, GPIO_Pin_13);
// 延时500ms
for (int i = 0; i < 500000; i++);
}
}
```
### 5.2 按键输入程序
**硬件连接:**
* STM32单片机
* 按键
* 10kΩ电阻
**代码实现:**
```c
#include "stm32f10x.h"
int main() {
// 初始化时钟系统
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
// 初始化GPIOA第0位为输入模式
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
while (1) {
// 检测按键是否按下
if (GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_0) == 0) {
// 按键按下,执行相应操作
// ...
}
}
}
```
### 5.3 串口通信程序
**硬件连接:**
* STM32单片机
* USB转串口模块
* 电脑
**代码实现:**
```c
#include "stm32f10x.h"
int main() {
// 初始化时钟系统
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
// 初始化USART1
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 115200;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_Init(USART1, &USART_InitStructure);
// 发送数据
USART_SendData(USART1, 'H');
USART_SendData(USART1, 'e');
USART_SendData(USART1, 'l');
USART_SendData(USART1, 'l');
USART_SendData(USART1, 'o');
// 接收数据
while (USART_GetFlagStatus(USART1, USART_FLAG_RXNE) == RESET);
uint8_t data = USART_ReceiveData(USART1);
}
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏提供全面的 STM32 单片机编程软件指南,涵盖从入门到精通的各个方面。从实战教程到底层原理剖析,再到优化技巧和常见问题解答,深入探讨了 STM32 编程软件的方方面面。还包括高级特性解析、性能提升秘诀、调试技巧、项目实战案例和嵌入式系统开发指南,为读者提供全面的知识和技能。此外,还涉及物联网应用、工业控制系统设计、实时操作系统集成、图形用户界面开发和无线通信技术应用,让读者能够掌握 STM32 编程软件在各个领域的应用。通过学习本专栏,读者可以快速掌握 STM32 编程软件,并将其应用于各种实际项目中。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【Python编程精进路线图】:从新手到专家的完整指南
# 摘要
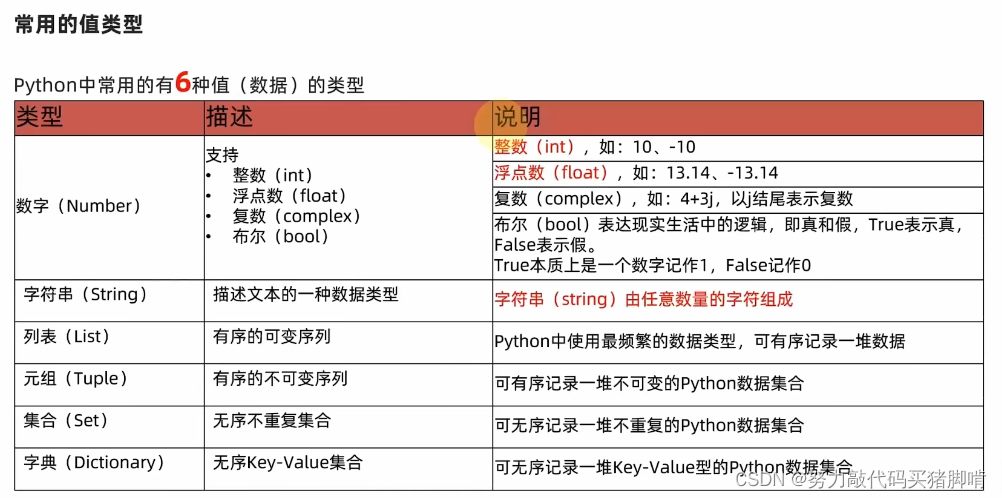
Python作为一种流行的编程语言,在初学者和专业开发者中得到了广泛的应用。本文旨在为读者提供从基础语法到高级编程技巧的全面教程。文章首先介绍Python的基础语法,包括数据类型、控制结构、函数以及面向对象编程的基础知识。接着,文中探讨了Python的高级编程技巧,如异常处理、模块和包管理以及文件和数据处理。在实践与项目开发章节中,文章详细阐述了Web开发、数据分析与可视化以及自动化脚本编写
【基恩士cv-x系列故障排查秘籍】:出库操作中的问题诊断与解决
# 摘要
本文针对基恩士cv-x系列的出库操作和故障排查进行了全面的概述和分析。首先介绍了故障排查的基本概念,然后详细阐述了基恩士cv-x系列出库操作的理论基础,包括出库流程解析、控制点以及可能遇到的问题类型。接着,本文提供了问题诊断的工具、方法和流程,以及针对软件故障、硬件故障和操作错误的具体解决策略。最后,强调了故障预防与维护的重要性,并通过实战案例分析总结出具体的故障解决步骤。本文旨在为基恩士cv-x系列用户和维护人员提供一套系统的出库操作指导和故障排查解决方案,提高设备运行的稳定性和效率。
# 关键字
基恩士cv-x系列;出库操作;故障排查;故障诊断;预防措施;维护策略
参考资源链
【风电系统整流技术】:六脉波与十二脉波整流器应用对比与选择
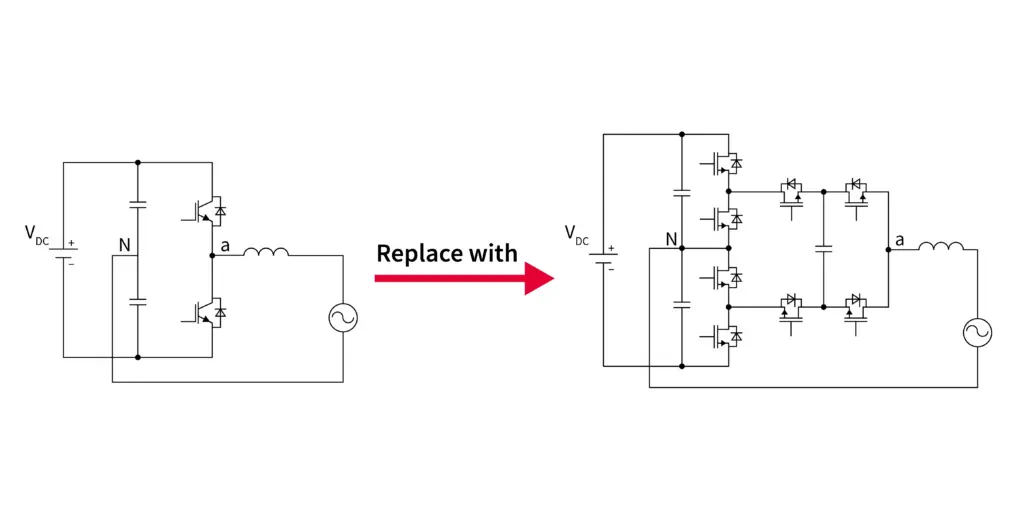
# 摘要
本文综述了风电系统中整流技术的应用,包括六脉波和十二脉波整流器的工作原理、技术特点及应用实例。通过对比分析,探讨了两种整流器在性能、成本和应用领域的差异,并提出了选择整流器时的决策过程和风险管理策略。案例研究与实证分析进一步验证了理论分析的可行性,提供了行业专家的视角和对未来发展的建议。本文旨在为风电系统的整流技术提供全面的技术分析和实用的决策支持。
# 关键字
风电
【子群发现技术】:揭秘如何识别社区结构
/i.s3.glbimg.com/v1/AUTH_08fbf48bc0524877943fe86e43087e7a/internal_photos/bs/2018/B/f/hyNZ42T72w5eQ2iWB4rg/captura-2018-10-04-15-26-57.png)
# 摘要
社区结构与子群发现技术是网络分析领域中的核心问题,它涉
【STM32WB固件更新挑战与解决方案】:优化流程,确保数据传输完整性

# 摘要
本文全面探讨了STM32WB微控制器的固件更新过程,从理论基础到实践操作,再到面临的挑战和未来发展趋势。首先,介绍了STM32WB的基本架构和固件更新机制的基本原理,以及常用固件更新协议和数据完整性的重要性。接着,详细阐述了固件更新的实践操作,
商业智能与数据可视化:CAP认证必过知识点的全方位解析

# 摘要
本文旨在全面概述商业智能(BI)与数据可视化,并详细探讨CAP认证的核心理论框架。文章首先介绍了商业智能和数据可视化的基本概念及其在商业决策中的应用,接着深入讲解数据仓库和数据湖的设计、构建与维护,以及数据模型的构建和多维分析技术。文章还着重讨论了CAP定理在数据管理领域的应用,并分析了各种商业智能工具的比较与应用。此外,文章深入探讨了数据治理的理论框架、数据质量的提升策略,以及
模拟登录与自动抢购:Autojs在双11活动中的实战应用

# 摘要
本文专注于Auto.js在Android平台上的自动化应用,从模拟登录到自动抢购,再到高级应用技巧的探讨,提供了全面的技术分析和实践指南。首先,分析了模拟登录的基本原理和实践步骤,着重于Android输入事件模拟机制和安全性考量。接着,探讨了自动抢购的策略分析、实践技巧以及性能优化。此外,本文还介绍了Auto.js在实现高级应用技巧中的事件监听
操作系统中电梯调度算法的并发问题分析(专家解读)

# 摘要
本文深入探讨了电梯调度算法及其并发控制策略,涵盖了算法的基本原理、并发编程基础、以及并发问题的类型、危害和控制策略。文章分析了多电梯协同作业及请求队列并发访问时可能出现的并发问题,并提出相应的改进策略。通过实验环境搭建、算法实现和性能评估,本文验
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )