【USB3 Vision协议实战演练】:打造高效稳定系统的全程攻略
发布时间: 2024-12-01 06:37:24 阅读量: 21 订阅数: 29 

USB3_vision英文协议手册
参考资源链接:[USB3 Vision协议详解:工业相机的USB3.0标准指南](https://wenku.csdn.net/doc/6vpdqfiyj3?spm=1055.2635.3001.10343)
# 1. USB3 Vision协议概述
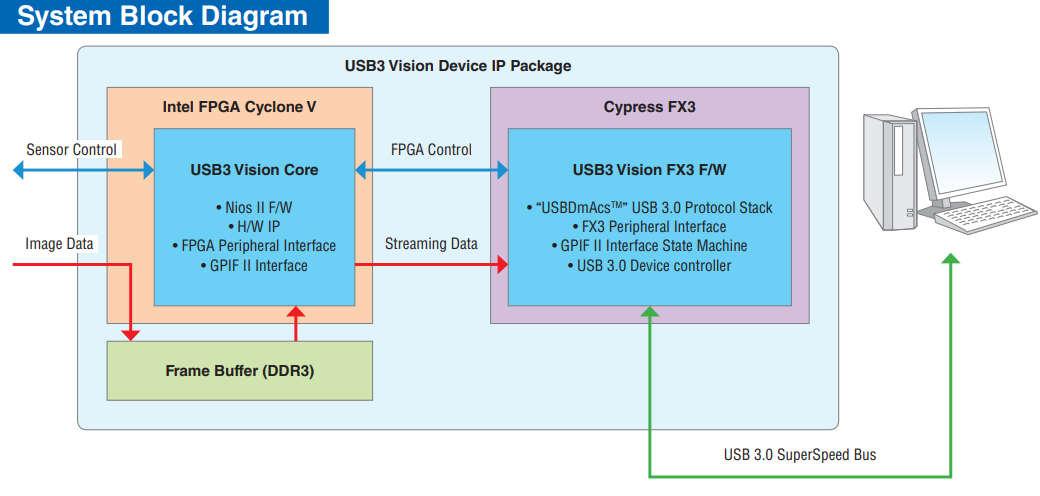
USB3 Vision协议是一个为机器视觉应用设计的开放标准,它基于USB3.0通信协议,旨在提供一种高速、简便、兼容性高的相机通信方式。本章节将简要介绍USB3 Vision的基本概念、发展背景以及其在现代视觉系统中的重要地位。
## 1.1 USB3 Vision的定义与标准
USB3 Vision是GenICam(通用工业摄像机编程接口)标准的一个实现,它允许用户通过USB3.0接口实现高性能的图像数据传输。该协议支持即插即用,简化了相机与计算机之间的连接过程。
## 1.2 协议的核心优势
该协议的核心优势在于其高速的数据传输能力(高达5 Gbit/s)和广泛的兼容性。它不仅支持USB3.0标准,还可以与现有的机器视觉系统集成,为用户提供更多的部署灵活性和选择空间。
## 1.3 应用场景概述
USB3 Vision广泛应用于制造业自动化、医疗成像、生物研究等领域。它能够应对这些领域对高速图像采集和处理的严苛要求,同时保证系统的稳定性和可靠性。
接下来的章节将深入探讨USB3 Vision协议在硬件连接、软件开发和高级应用方面的细节,为读者提供实用的技术指导和经验分享。
# 2. USB3 Vision协议的硬件连接与配置
## 2.1 硬件设备的选择与兼容性
### 2.1.1 USB3.0相机的性能指标
选择合适的USB3.0相机是构建高质量视觉系统的关键。USB3 Vision相机相比于其前任USB2 Vision,提供了更高的带宽和更快的数据传输速度。性能指标主要包括帧率(Frame Rate)、分辨率(Resolution)、灵敏度(Sensitivity)、信噪比(Signal-to-Noise Ratio, SNR)和动态范围(Dynamic Range)。
- **帧率** 表示每秒可以采集多少帧图像。高帧率对于运动目标的捕获至关重要。
- **分辨率** 由像素数量决定,影响图像的细节丰富程度。较高的分辨率能提供更多的图像细节,但同时会增加对带宽和处理能力的需求。
- **灵敏度** 描述相机对光的敏感程度。高灵敏度意味着在低光照条件下仍能捕捉到清晰图像。
- **信噪比** 反映图像质量的重要参数,高信噪比代表图像清晰、噪声低。
- **动态范围** 决定了相机能够同时记录亮度最高和最低部分的能力。
当选择USB3.0相机时,需要根据实际应用的需求,权衡各项指标的优劣,确保相机的性能能够满足应用场景。
### 2.1.2 主机端的接口与扩展卡
主机端的接口和扩展卡也是USB3 Vision系统的关键组成部分。根据不同的主机平台(如PC、笔记本电脑等),选择合适的USB3.0接口或扩展卡至关重要。接口类型通常包括USB3.0 Type-A、Type-B以及更常见的Mini和Micro连接器。
扩展卡的作用在于为不支持USB3.0的旧系统提供必要的硬件支持。选择扩展卡时,应确保其与主板兼容并能满足系统最大带宽的需求。为避免数据传输瓶颈,扩展卡的接口带宽应大于相机所能提供的最大带宽。
## 2.2 接口连接与线路布局
### 2.2.1 线缆的选择与布线要求
USB3 Vision相机的接口连接需通过高质量的USB3.0线缆。线缆的选择应基于线缆长度和质量要求。长距离传输时,应使用带有额外信号增强功能的线缆,以确保数据的完整性。
线缆的长度与信号衰减相关,USB3.0标准规定线缆长度不应超过5米,但这在实际中可能会有所偏差。为避免信号衰减,建议在可能的情况下使用短于5米的线缆,并在布局时注意以下几点:
- 确保线缆远离电磁干扰源,如电源线、大型电机等。
- 避免线缆弯曲过度,以免物理损伤导致内部导线断裂。
- 使用带有屏蔽的线缆以增强抗干扰能力。
### 2.2.2 连接器的类型与适用场景
连接器类型的选择会影响整体系统的稳定性和兼容性。常见的USB3.0连接器有Type-A、Type-B、Mini和Micro等。其中,Type-B主要用于工业相机与PC之间的直接连接,而Type-A通常用于连接外设。
在选择连接器时,需要考虑实际应用场景:
- **工业环境** 中,选择金属外壳的连接器,因为它们通常具有更高的耐用性和更佳的抗干扰能力。
- **实验室环境** 中,则可以根据美学和空间限制选择更小巧的连接器。
- **移动设备** 使用Mini或Micro连接器,以满足紧凑空间的需求。
## 2.3 配置步骤和注意事项
### 2.3.1 安装USB3 Vision驱动
正确安装USB3 Vision驱动是系统配置的第一步。首先,确保系统支持USB3.0标准,然后根据相机制造商提供的安装向导或文档进行操作。通常,安装驱动包括以下步骤:
1. 连接相机到主机。
2. 在设备管理器中查找新的硬件设备,并安装正确的驱动程序。
3. 使用厂商提供的软件工具测试相机是否正常工作。
4. 调整系统设置(如电源管理和带宽分配)以优化性能。
驱动安装完成后,建议运行一些基准测试来确保驱动工作正常,并且相机运行在最佳状态。
### 2.3.2 调整硬件设置以优化性能
为了达到最优的系统性能,通常需要对硬件进行一些配置。其中包括:
- **电源管理**:设置主机端电源选项,避免在系统低负载时进入低功耗状态,这可能会影响USB设备的数据传输。
- **带宽分配**:在多USB设备同时使用的系统中,适当分配带宽以避免数据拥堵。
- **中断请求**:正确配置中断请求(IRQ)可以减少数据传输的延迟。
硬件设置的调整往往需要根据具体应用和环境进行定制。在设置过程中,实时监控系统性能,确保配置能够带来预期的性能提升。
# 3. USB3 Vision协议的软件开发基础
## 3.1 开发环境的搭建
搭建一个USB3 Vision协议的软件开发环境,是进行任何开发工作的第一步。一个良好的开发环境能够为开发者提供所需的工具、库和配置,使得软件开发流程更为高效和顺畅。
### 3.1.1 选择合适的开发工具和库
首先需要确定的是软件开发中所使用的核心库以及开发工具。对于USB3 Vision协议,一般推荐使用GenICam标准,它是用于编程控制图像采集设备的开放标准,由EMVA(European Machine Vision Association)维护。GenICam通过提供统一的编程接口简化了不同厂商相机的开发工作。
选择开发工具时,可以考虑使用如C/C++、Python等语言结合特定的开发库,例如libusb、Spinnaker SDK或Basler pylon SDK等。这些库通常提供了一套针对USB3 Vision协议的高级接口,让开发者可以不必直接处理底层协议细节。
### 3.1.2 配置开发环境
搭建开发环境涉及多个步骤,首先要下载和安装所选的库。接着,配置开发工具,例如IDE(集成开发环境),确保所有库文件和头文件被正确链接。
对于C/C++开发者,这一过程可能包括设置编译器和链接器选项,确保库文件路径被正确添加到项目中。Python开发者则需要确保相关的库已经安装并且可以被Python环境识别。
以下是使用CMake配置一个简单的项目环境的示例代码块:
```cmake
# CMakeLists.txt配置示例
cmake_minimum_required(VERSION 3.10)
project(USB3VisionDemo)
find_package(OpenCV REQUIRED)
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《USB3 Vision中文协议手册》专栏全面介绍了USB3 Vision协议的方方面面。从入门指南到实战技巧,从应用案例到技术对比,从安装配置到协议框架,从实战演练到标准解读,从医疗影像应用到最佳实践,再到调试技巧,专栏涵盖了协议的各个方面,提供了深入浅出的讲解和丰富的案例分析。通过阅读本专栏,读者可以全面掌握USB3 Vision协议的知识,并将其应用于实际项目中,打造高效稳定、性能优异的机器视觉系统。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【实践必备】:爱普生ESC指令集应用指南,轻松实现打印机控制
# 摘要
本文全面介绍了爱普生打印机使用的ESC/POS指令集,首先概述了指令集的架构与功能,并对核心指令进行了详细解析。随后,探讨了ESC/POS指令集在不同编程语言中的应用,提供了实际打印任务的设计与实现案例。文章进一步分析了爱普生打印机的高级控制方法,包括连接与通信协议、驱动与接口编程,以及自定义功能和第三方库的应用。最后,通过案例研究展示了如何打造个性化打印解决方案,并讨论了常见问题的诊断与解决方法,以及打印机的维护与性能优化策略。
# 关键字
爱普生打印机;ESC/POS指令集;编程语言应用;打印任务设计;高级控制;故障排除
参考资源链接:[爱普生ESC/P指令集详解:热敏打印机
光栅立体画尺寸与比例计算:优化视觉效果的科学方法

# 摘要
光栅立体画作为视觉艺术的一种形式,其基本原理和制作技巧一直是艺术家和研究人员关注的焦点。本文详细探讨了光栅立体画的视觉效果与光栅尺寸之间的关联,分析了分辨率调整、实际制作流程以及视觉效果优化策略。进一步地,文章对创新技术在光栅立体画中的应用进行了研究,包括新型光栅材料和数字化制作流程,以及这些技术对行业的影响。最后,本文对光栅立体画的未来发展趋势进行了展望,并提出了相应的行业建议和长期研究目标
深入解析AP6256:硬件架构与工作原理的详尽指南(20年行业专家揭秘)
# 摘要
本文对AP6256硬件设备进行了全面的介绍和深入分析。首先概述了AP6256的硬件组成,包括其处理器、内存架构、无线通信模块等主要组件,并探讨了其电气特性与接口设计,如电源管理和I/O扩展能力。接着,文章深入阐述了AP6256的工作原理,包括功能模块的操作机制和信号处理流程,并介绍了关键技术和算法,如信号调制解调技术及信道编码。此外,文中还详细描述了AP6256的编程接口、开发环境及工具链,并提供了应用案例分析和问题解决策略。最后,针对AP6256的安全性进行了分析,并对未来的技术趋势与研发方向进行了展望,探讨了新兴技术如何塑造行业未来。
# 关键字
AP6256硬件;无线通信模块
Java异常处理的正确打开方式:IKM测试题的全面解析

# 摘要
本文全面探讨了Java异常处理的各个方面,从基础知识到高级应用,提供了系统的分析与实践技巧。首先概述了异常处理的概念和Java异常的分类结构,然后深入到异常捕获的高级技巧、异常处理的优化方法,以及异常处理与资源管理的关系。接着,本文通过IKM测试题的解析与应用,强调了理论与实践相结合的重要性。在项目
君正T40EVB原理图学习宝典:从入门到精通的专家进阶之路
# 摘要
本文对君正T40EVB开发板进行了全面的介绍,涵盖其硬件架构、软件开发环境搭建、应用编程实践及高级应用和优化策略。文中首先概述了T40EVB开发板的基本情况,随后深入分析了其核心处理器特性和外围设备。接着,详细说明了如何搭建软件开发环境,包括固件管理、工具链配置及操作系统支持。在应用编程方面,本文提供了底层驱动开发和应用层软件开发的具体案例,以及系统集成和测试方法。最后,探讨了系统性能调优、安全机制构建和创新项目实践,并展望了T40EVB在新兴领域的应用前景及持续学习的资源。本文旨在为君正T40EVB开发板用户提供实用的指导和资源,以促进其在多样化的项目中的有效应用。
# 关键字
【实验数据管理】:Logisim字库存储数据备份与恢复,专家级操作技巧

# 摘要
本文深入探讨了Logisim环境下的字库存储基础、数据备份与恢复流程、存储性能优化以及灾难恢复计划制定,旨在为读者提供全面的理论知识和实践经验。通过分析数据备份的重要性、类型和策略,详细介绍了Logisim中数据
【DD6300存储配置与优化】:存储性能与容量利用最大化策略
# 摘要
本文全面介绍了DD6300存储系统,从基础概念到性能优化及配置实践进行了详细探讨。首先概述了DD6300存储系统的基本架构和功能,随后深入分析了存储性能优化的理论基础,包括关键性能指标和容量管理理论。接着,本文详细阐述了DD6300的存储配置步骤、高级特性的实现以及监控与管理方法。在性能优化实践方面,提供了实战技巧,并讨论了容量优化和灾难恢复配置。最后,通过案例研究,本文展示了DD6300在真实环境中的应用,并对存储技术的未来发展进行了展望。
# 关键字
DD6300存储系统;性能优化;容量管理;存储配置;监控与管理;灾难恢复;技术趋势
参考资源链接:[Dell EMC Data
PPPoE会话管理详解:会话建立、维护与终止策略

# 摘要
PPPoE(Point-to-Point Protocol over Ethernet)是一种广泛使用的网络协议,用于实现宽带网络上的点对点连接。本文从PPPoE协议的基础知识和应用场景入手,详细探讨了PPPoE会话的建立、维护、终止过程及其相关技术细节。文章分析了PPPoE会话建立过程中的封装机制、认证协议和常见问题解决策略。在会话维护方面,本文讨论了Keepalive消息处理、QoS配置和网络管理
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )