【图像分割性能比较指南】:2023年最新评估方法与实践技巧
发布时间: 2024-09-03 23:28:31 阅读量: 420 订阅数: 78 
# 1. 图像分割技术概述
图像分割是计算机视觉中的一个基本任务,它将数字图像细分为多个部分或对象。这个过程的目的是简化或改变图像的表示形式,使得这些部分变得易于理解和分析。尽管图像分割技术在各种应用领域如医疗成像、自动驾驶和卫星图像分析中有着广泛的应用,但它依然是一个具有挑战性的研究领域,因为它涉及到从复杂的背景中识别出有意义的区域,这些区域通常有着复杂的形状和颜色,甚至可能彼此粘连。图像分割技术的发展,不仅仅是为了处理静态图片,还包括处理视频序列和实时流媒体,这使得对高效、准确的算法的需求更为迫切。在本章中,我们将介绍图像分割的核心概念、方法和应用,为读者构建一个扎实的基础,帮助理解后续章节将探讨的深度学习技术与最新评估方法。
# 2. 理论基础与评估指标
### 2.1 图像分割的基本概念
#### 2.1.1 图像分割的定义与目的
图像分割是将数字图像细分为多个图像区域(即像素的集合)的过程,目的是简化或改变图像的表示形式,使之更易于分析。它旨在改变图像的表示形式,让感兴趣的区域(如物体、物体边界等)更容易识别和分析。
图像分割是计算机视觉和图像处理领域的一个基础任务,因为通过分割可以得到图像中的关键信息,为后续的图像分析、识别和理解提供重要基础。例如,在自动驾驶汽车中,图像分割可以帮助识别道路、行人、车辆和其他障碍物,这是实现安全驾驶的关键。
### 2.1.2 常见的图像分割方法概述
图像分割的方法大致可以分为基于边缘检测的方法、基于聚类的方法、基于区域生长的方法、基于阈值化的方法以及基于深度学习的方法。其中,深度学习方法,特别是卷积神经网络(CNN),在最近几年的图像分割领域取得了显著的成功。
基于边缘检测的方法利用图像边缘信息进行分割,而基于聚类的方法将像素分为多个类别,通常是利用颜色或者像素强度相似性进行。区域生长的方法基于种子点逐渐扩张区域直到满足一定的停止条件,而基于阈值化的方法则通过设置合适的阈值来分离前景和背景。然而,随着深度学习的发展,这些传统方法已逐渐被更高效、精确的深度学习方法所取代。
### 2.2 图像分割性能评估指标
#### 2.2.1 精确度(Precision)和召回率(Recall)
精确度和召回率是衡量分类问题性能的两个重要指标,它们同样适用于图像分割任务。精确度关注的是所有预测为正的样本中真正为正的样本比例,而召回率关注的是所有实际为正的样本中有多少被正确识别出来。
在图像分割中,如果将像素点的预测看作是二分类问题(前景和背景),那么精确度就是正确预测为前景的像素占所有预测为前景像素的比例。召回率则是正确预测为前景的像素占实际所有前景像素的比例。
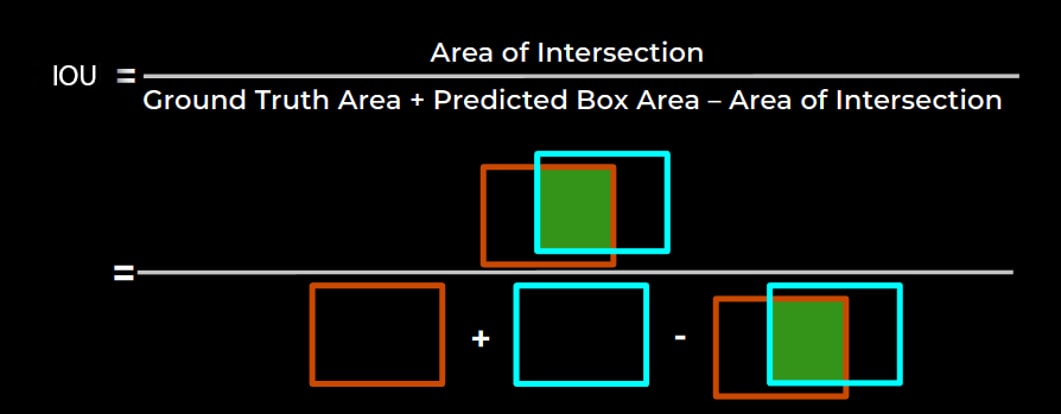
### 2.2.2 交并比(Intersection over Union, IoU)
交并比是图像分割领域中用于衡量预测区域与真实区域重合度的重要指标。IoU定义为预测区域和真实区域的交集大小除以它们的并集大小。它的取值范围在0到1之间,值越高表示分割越精确。
在图像分割问题中,IoU作为评价标准比精确度和召回率更为严格,因为它同时考虑了预测的准确性和完整性。它在许多深度学习模型训练中作为损失函数的一部分,对于提高分割的准确性非常有帮助。
### 2.2.3 F1分数和Dice系数
F1分数是精确度和召回率的调和平均值,提供了同时考虑两者的一种方法。F1分数越高,表示模型的性能越好。F1分数的计算公式是:F1 = 2 * (precision * recall) / (precision + recall)。
Dice系数也是用于衡量两个样本相似性的指标,它与F1分数相似,是交集大小的两倍除以两个样本大小之和。它主要用于医学图像分割等任务中,由于Dice系数对分割结果的不完美比较宽容,因此非常适合评估包含大量小目标的图像。
### 2.3 深度学习在图像分割中的角色
#### 2.3.1 卷积神经网络(CNN)的基础
卷积神经网络(CNN)是深度学习领域中最重要的模型之一,特别是在图像分割任务中,它通过卷积层、池化层、激活函数等结构自动提取和学习图像的层次化特征表示,这对于图像分割是非常有帮助的。
在图像分割任务中,CNN模型不仅能够识别图像中的重要特征,还能够确定这些特征在空间中的位置。通过端到端的训练,CNN可以逐像素地预测图像中每个像素点的类别,从而实现像素级的图像分割。
### 2.3.2 转移学习与预训练模型在分割中的应用
转移学习是指使用在某个任务上训练好的模型,调整并用于相关的新任务。在图像分割中,预训练模型可以基于大量的通用图像数据进行训练,然后迁移到特定的图像分割任务上。
预训练模型的优点在于能够显著减少所需标注数据的数量和训练时间。它们已经学会了从图像中提取有用的特征,可以作为分割模型的起点,加速和改善新任务上的训练效果。
预训练模型的迁移过程可以细分为几个步骤。首先,从源数据集中学习到的特征提取器在新数据集上进行微调。其次,有时可以使用域适应技术来适应不同分布的数据。最后,针对特定任务进行特定层的调整和训练。预训练模型的应用已经在多个图像分割案例中证明了其有效性。
# 3. 最新评估方法与工具
在本章节中,我们将探讨最新的图像分割评估方法以及介绍一些评估工具和框架。图像分割作为计算机视觉的重要分支,不断有新的评估方法涌现,以更准确地衡量模型性能。同时,为了方便研究人员和开发者进行图像分割任务,市场上也出现了很多优秀的评估工具与框架。了解和掌握这些内容,对于深入研究图像分割和实际应用都有重要价值。
## 3.1 新兴的图像分割评估方法
随着深度学习技术的不断进步,图像分割评估方法也在不断发展。这里我们将重点介绍两类新兴的图像分割评估方法:深度度量学习方法和基于注意力机制的评估策略。
### 3.1.1 深度度量学习方法
深度度量学习方法通过学习一个映射,使得相似的样本在特征空间中的距离更近,而不相似的样本距离更远。这类方法在图像分割的评估中被用来衡量分割出的区域与真实标签之间的相似度。
在图像分割中,一个典型的深度度量学习方法是通过构建一个端到端的深度网络结构,该结构在学习分割任务的同时,也学习如何度量分割区域的相似性。例如,通过对比学习(Contrastive Learning),网络可以学习到分割区域间的语义关系,并优化分割质量。
### 3.1.2 基于注意力机制的评估策略
注意力机制已被证明可以显著提升深度学习模型在图像处理任务中的性能。它模拟人类视觉注意力,可以使得模型聚焦于图像中的关键部分,而忽略不相关的信息。
在图像分割的评估中,注意力机制可以用来关注那些对分割结果贡献较大的区域,并对模型预测的每个像素点赋予不同的权重。这样,评估过程不仅关注整体性能,还能细致地考量模型在各个区域的表现。基于注意力机制的评估方法可以提供更为直观和细致的性能反馈。
## 3.2 评估工具与框架
评估工具与框架对于快速准确地进行图像分割任务的评估至关重要。我们将探讨在选择评估框架时需要考虑的因素,并介绍一些实用的评估工具及它们的应用案例。
### 3.2.1 评估框架的比较与选择
选择合适的评估框架首先需要明确评估的目的和评估指标。不同的框架在计算效率、灵活性、易用性等方面各有优劣。比如,有些框架可能在计算交并比(IoU)时非常高效,而有些则可能提供了更多的评估指标和可视化工具。
在实际应用中,评估框架的选择还应当考虑以下因素:
- 是否支持自定义评估指标
- 是否提供了易于使用的API接口
- 是否能够与其他深度学习框架(如TensorFlow, PyTorch等)无缝集成
- 是否拥有活跃的社区和持续的更新支持
### 3.2.2 实用工具的介绍与应用案例
在本小节中,我们将介绍几个流行的图像分割评估工具,并提供一些实际应用案例。这些工具能够帮助开发者和研究者更高效地进行图像分割任务的评估。
#### TensorBoard
TensorBoard是TensorFlow官方提供的可视化工具,它可以帮助研究人员在训练过程中直观地查看损失曲线、计算指标等信息。对于图像分割任务,TensorBoard提供了丰富的可视化插件,包括直方图、图像、音频等。
使用TensorBoard进行图像分割评估的一个案例是在医学图像分割中,通过对分割结果和真实标签进行可视化比较,可以帮助医生和研究者理解模型的分割表现。
#### Mean IoU
Mean Intersection over Union(Mean IoU)是衡量分割模型性能的常用指标。它计算所有类别上IoU的平均值,用于评估模型在多类别分割任务中的整体性能。
一个使用Mean IoU作为评估指标的应用案例是自动驾驶场景中的车辆检测。通过计算分割出的车辆区域与真实标签的IoU值,可以评估车辆检测模型的性能。
#### Evaluation Metrics in scikit-image
scikit-image是一个基于Python的图像处理库,它提供了多种图像评估指标,包括像素精度(pixel accuracy)、交并比(IoU)和F1分数等。这些指标使得评估工作更加标准化和易于实现。
在实际应用中,使用scikit-image的评估指标能够帮助开发者快速比较不同模型的性能,并进行模型选择。例如,在工业自动化领域,通过这些评估指标,可以更准确地选择出最适合特定检测任务的图像分割模型。
## 3.3 实验设计与结果解读
为了确保图像分割模型评估的有效性和可靠性,设计合理的实验和准确解读结果至关重要。我们将探讨实验设计的关键要点,并提供结果可视化与解读的技巧。
### 3.3.1 实验设计的要点
实验设计阶段需要确定评估的基准,包括选择合适的数据集、定义评估指标、以及确定模型的训练和测试策略等。要点包括:
- **选择数据集**:选用具有代表性的标准数据集,或根据实际情况定制专属的数据集。
- **定义评估指标**:明确哪些指标将用于评估模型性能,并根据任务需求选择主要和次要指标。
- **模型训练与测试**:确保模型在不同条件下都经过充分训练,并采用交叉验证等方法来测试模型的泛化能力。
### 3.3.2 结果的可视化与解读技巧
结果可视化和解读是实验设计的最后一步,其目的是直观展示模型的性能,并提供可供决策的见解。常用的技巧包括:
- **绘制指标曲线图**:通过绘制精度、召回率、F1分数等指标随训练周期变化的曲线图,可以直观地展示模型训练的稳定性和收敛性。
- **混淆矩阵**:使用混淆矩阵可以清晰展示模型分类的正确与否,尤其在多类别的分割任务中非常有效。
- **错误分析**:通过分析模型预测错误的案例,可以找到模型性能不佳的原因,并指导模型的进一步优化。
通过上述方法,可以将复杂的评估结果转化为易于理解的信息,帮助开发者和研究人员做出更加明智的决策。
我们已经完成了第三章的内容,接下来将继续深入探讨第四章的内容,涵盖图像分割实践技巧中的数据增强与预处理、模型训练与调优以及网络结构创新等方面,为读者提供更多实际应用与操作层面的详细指导。
# 4. 图像分割实践技巧
### 4.1 数据增强与预处理
图像分割任务中,数据是构成模型学习的重要基石。数据的质量直接影响到分割模型的准确性和鲁棒性。因此,数据增强与预处理成为图像分割前不可或缺的环节。
#### 4.1.1 数据增强的方法与效果
数据增强的目的是通过一系列变换来人为地扩充训练数据集,从而提高模型对新数据的泛化能力。常见的数据增强方法包括旋转、缩放、剪切、翻转、色彩变换等。使用数据增强可以带来以下效果:
- **提高模型鲁棒性**:通过数据增强,模型能够在更多样化的样本上训练,从而提升在面对真实世界数据时的泛化能力。
- **避免过拟合**:数据增强增加了数据的多样性,减少了模型过度拟合单一训练样本的风险。
- **更高效的利用数据**:在数据集较小的情况下,数据增强能够有效扩充训练集,增加模型训练时的学习信号。
```python
from imgaug import augmenters as iaa
# 定义数据增强序列
seq = iaa.Sequential([
iaa.Fliplr(0.5), # 随机水平翻转
iaa.Affine(
scale={"x": (0.8, 1.2), "y": (0.8, 1.2)}, # 随机缩放
rotate=(-45, 45) # 随机旋转
),
iaa.GaussianBlur(sigma=(0, 0.5)) # 高斯模糊
])
# 使用定义的增强序列对图像进行增强
aug_img = seq(image=my_image)
```
在上述代码中,使用了`imgaug`库来对图像进行增强,通过组合不同的变换以生成新的训练样本。参数`scale`定义了随机缩放的范围,`rotate`定义了旋转的角度范围,而`GaussianBlur`则为图像添加了高斯模糊效果。
#### 4.1.2 图像预处理的重要性与步骤
图像预处理是确保图像分割任务能够高效且准确执行的关键步骤。正确的预处理方法可以减少噪声、标准化数据、提高特征的可区分性,并减少计算负担。预处理步骤通常包括以下几个方面:
1. **标准化与归一化**:将图像的像素值标准化至一个固定范围(例如0到1),或者进行归一化处理,使得输入数据具有统一的尺度。
2. **尺寸调整**:为了模型能够接受标准尺寸的输入,需要将所有图像调整至统一大小。
3. **去噪**:图像常常包含噪声,使用各种滤波器(如高斯滤波器、中值滤波器等)进行去噪。
4. **增强对比度**:通过直方图均衡化等技术增强图像对比度,有助于模型识别图像中的重要特征。
```python
from skimage import exposure, transform
import numpy as np
# 读取图像
image = io.imread(image_path)
# 标准化像素值
image_normalized = (image - np.min(image)) / (np.max(image) - np.min(image))
# 图像尺寸调整
image_resized = transform.resize(image_normalized, (new_height, new_width))
# 直方图均衡化增强对比度
image_equalized = exposure.equalize_hist(image_resized)
# 显示处理后的图像
io.imshow(image_equalized)
io.show()
```
以上代码展示了如何使用`skimage`库对图像进行预处理,包括标准化、尺寸调整和直方图均衡化处理。步骤中使用了`transform.resize`对图像进行尺寸调整,而`exposure.equalize_hist`则对图像进行了直方图均衡化处理。
### 4.2 模型训练与调优
在图像分割领域,设计高效且精确的模型是研究和应用的重点。模型训练和调优是图像分割工作中的关键环节。
#### 4.2.1 超参数的选择与调优策略
模型的超参数对训练过程和结果具有重要影响。超参数包括学习率、批次大小、迭代次数等。选择合适的超参数以及调优策略是提高模型性能的重要手段:
- **学习率**:影响模型权重更新的速度和方向,选择恰当的学习率至关重要。
- **批次大小**:决定了每次模型训练时的样本数量,不同的批次大小会影响训练的稳定性和收敛速度。
- **迭代次数**:通常通过验证集上的表现来确定模型训练的次数。
超参数的优化常用方法有网格搜索(Grid Search)、随机搜索(Random Search)和贝叶斯优化(Bayesian Optimization)等。每种方法各有优劣,贝叶斯优化在寻找全局最优解方面表现出色,但计算成本较高。
```python
from sklearn.model_selection import GridSearchCV
from sklearn.svm import SVC
# 定义模型和参数网格
model = SVC()
param_grid = {
'C': [0.1, 1, 10, 100], # 正则化强度
'gamma': [1, 0.1, 0.01, 0.001], # 核函数的系数
'kernel': ['rbf', 'poly'] # 核函数类型
}
# 创建GridSearchCV对象
grid_search = GridSearchCV(estimator=model, param_grid=param_grid, cv=5, scoring='accuracy')
# 拟合模型
grid_search.fit(X_train, y_train)
# 输出最佳参数
print("Best parameters found: ", grid_search.best_params_)
```
在此示例中,我们使用`GridSearchCV`对支持向量机(SVM)模型进行超参数优化,通过5折交叉验证,评估不同参数组合下的模型准确率,从而找到最优超参数组合。
#### 4.2.2 损失函数的设计与优化
损失函数是指导模型优化的核心,其设计直接决定了模型训练的目标和效果。对于图像分割任务,常见的损失函数包括交叉熵损失(Cross-Entropy Loss)、Dice损失(Dice Loss)和边界损失(Boundary Loss)等。
- **交叉熵损失**:常用于多分类问题,衡量模型预测概率分布与真实标签分布之间的差异。
- **Dice损失**:基于 Dice 系数,是一种更适合图像分割任务的损失函数,能够在类别不平衡情况下取得更好的分割效果。
- **边界损失**:关注于分割边界的质量,适合于需要准确界线的分割任务。
选择合适的损失函数或结合多种损失函数进行优化,是模型训练中调整的重点。实际应用中,可能会根据任务的特定需要对损失函数进行定制化设计。
```python
from keras import backend as K
from keras.losses import binary_crossentropy
def dice_loss(y_true, y_pred):
smooth = 1.
y_true_f = K.flatten(y_true)
y_pred_f = K.flatten(y_pred)
intersection = K.sum(y_true_f * y_pred_f)
return 1 - ((2. * intersection + smooth) / (K.sum(y_true_f) + K.sum(y_pred_f) + smooth))
# 编译模型时使用自定义的损失函数
***pile(optimizer='adam', loss=dice_loss)
```
上面的代码段定义了一个基于Dice系数的损失函数`dice_loss`,并将其应用在模型的编译阶段。使用自定义的损失函数有助于模型更加关注于分割任务的目标。
### 4.3 网络结构创新
随着深度学习技术的发展,网络结构的创新已经成为提高图像分割性能的一个重要方向。
#### 4.3.1 现有网络结构的总结与比较
目前,众多研究者已提出了多种网络结构以满足不同图像分割任务的需求。例如:
- **U-Net**:专为医学图像分割设计的网络结构,具有跳跃连接和对称结构,能够有效捕捉图像的上下文信息。
- **Mask R-CNN**:在Faster R-CNN的基础上增加了一个分支进行像素级的分割,适用于实例分割任务。
- **DeepLab系列**:使用空洞卷积(Atrous Convolution)来实现多尺度上下文信息的整合,提高分割精度。
对这些网络进行比较可以发现,它们各有优势与不足,例如U-Net在医学图像分割领域表现卓越,而Mask R-CNN更适合于实例分割任务。
#### 4.3.2 网络结构创新的实际案例
网络结构的创新有助于应对特定场景下的挑战。例如,为了提高网络在资源受限的情况下的性能,研究者提出了一些轻量级网络结构,如MobileNet和ShuffleNet。这些结构通过减少参数数量和计算量,实现在边缘设备上进行高效分割。
例如,MobileNetV2在保持准确率的前提下,通过深度可分离卷积来减少参数量和计算量,非常适合移动和嵌入式设备。
```python
from keras.applications import MobileNetV2
# 使用MobileNetV2作为特征提取器
base_model = MobileNetV2(input_shape=(height, width, 3), include_top=False, weights='imagenet')
# 在特征提取器的基础上构建分割模型
# 添加所需的自定义层
model = Sequential([
base_model,
GlobalAveragePooling2D(), # 全局平均池化层
Dense(num_classes, activation='softmax') # 全连接层和softmax激活函数
])
# 编译并训练模型
***pile(optimizer='adam', loss='categorical_crossentropy', metrics=['accuracy'])
model.fit(X_train, y_train, batch_size=32, epochs=10)
```
在此示例中,我们使用了预训练的MobileNetV2作为特征提取器,并在其基础上添加了全局平均池化层和全连接层来完成分割任务。这种轻量级的结构在医学图像处理等对实时性要求较高的场景中具有潜在应用价值。
### 4.4 应用案例:基于深度学习的卫星图像分割
卫星图像分割是遥感数据处理的重要应用领域,可用于土地覆盖分类、城市规划、灾害监测等。深度学习的介入大大提高了从卫星图像中自动提取信息的准确性。本节将探讨几个关键的应用案例。
#### 4.4.1 土地覆盖分类
土地覆盖分类指的是将卫星图像中的像素分配到不同的土地覆盖类型(如水体、森林、城市等)的过程。通过训练深度学习模型,可以自动化并加速这一过程。深度学习模型不仅能够处理传统图像特征,还能够学习更加复杂的时空特征。
```python
from keras.models import Model
from keras.layers import Input, Conv2D, MaxPooling2D, UpSampling2D
# 构建一个简单的卷积神经网络用于土地覆盖分类
input_img = Input(shape=(height, width, 3))
x = Conv2D(64, (3, 3), activation='relu', padding='same')(input_img)
x = MaxPooling2D((2, 2), padding='same')(x)
x = Conv2D(128, (3, 3), activation='relu', padding='same')(x)
x = MaxPooling2D((2, 2), padding='same')(x)
x = Conv2D(256, (3, 3), activation='relu', padding='same')(x)
encoded = MaxPooling2D((2, 2), padding='same')(x)
# 通过上采样和卷积层进行解码
x = Conv2D(256, (3, 3), activation='relu', padding='same')(encoded)
x = UpSampling2D((2, 2))(x)
x = Conv2D(128, (3, 3), activation='relu', padding='same')(x)
x = UpSampling2D((2, 2))(x)
x = Conv2D(64, (3, 3), activation='relu', padding='same')(x)
decoded = UpSampling2D((2, 2))(x)
# 使用Softmax激活函数进行分类
output_img = Conv2D(num_classes, (3, 3), activation='softmax', padding='same')(decoded)
# 定义Autoencoder模型
autoencoder = Model(input_img, output_img)
***pile(optimizer='adam', loss='categorical_crossentropy')
# 训练模型
autoencoder.fit(X_train, y_train, batch_size=32, epochs=10)
```
在这段代码中,我们构建了一个卷积神经网络(CNN),其结构类似于一个自动编码器,能够学习图像的压缩表示,并通过Softmax层进行分类。该模型适合用于卫星图像的土地覆盖分类。
#### 4.4.2 城市规划
在城市规划中,卫星图像分割可以辅助识别城市的不同区域,如住宅区、商业区、工业区等。深度学习模型可以用于分析建筑物的分布、交通网络以及城市绿地等信息。
```python
# 假设X_train已经包含了处理过的卫星图像
# 假设y_train是一个one-hot编码的矩阵,表示不同的城市区域
# 构建城市规划用的分割模型
model = Sequential()
model.add(Conv2D(32, (3, 3), activation='relu', input_shape=(height, width, 3)))
model.add(MaxPooling2D((2, 2)))
model.add(Conv2D(64, (3, 3), activation='relu'))
model.add(MaxPooling2D((2, 2)))
model.add(Conv2D(128, (3, 3), activation='relu'))
model.add(MaxPooling2D((2, 2)))
model.add(Flatten())
model.add(Dense(512, activation='relu'))
model.add(Dense(num_classes, activation='softmax'))
# 编译并训练模型
***pile(optimizer='adam', loss='categorical_crossentropy', metrics=['accuracy'])
model.fit(X_train, y_train, batch_size=32, epochs=10)
```
以上代码构建了一个简单的CNN模型用于城市区域的分割。通过分类不同区域,该模型可以辅助城市规划者更好地理解城市的现状和未来发展的可能性。
#### 4.4.3 灾害监测
灾害监测是卫星图像分割应用中的一个重要方向。通过对卫星图像进行实时监控,可以快速定位受灾区域,评估灾害影响。深度学习模型能够自动识别受损的建筑物、倒下的树木、洪水淹没区域等关键信息。
```python
# 构建灾害监测用的分割模型
model = Sequential()
model.add(Conv2D(32, (3, 3), activation='relu', input_shape=(height, width, 3)))
model.add(MaxPooling2D((2, 2)))
model.add(Conv2D(64, (3, 3), activation='relu'))
model.add(MaxPooling2D((2, 2)))
model.add(Conv2D(128, (3, 3), activation='relu'))
model.add(MaxPooling2D((2, 2)))
model.add(Flatten())
model.add(Dense(512, activation='relu'))
model.add(Dense(num_classes, activation='sigmoid')) # 使用sigmoid激活函数进行二分类
# 编译并训练模型
***pile(optimizer='adam', loss='binary_crossentropy', metrics=['accuracy'])
model.fit(X_train, y_train, batch_size=32, epochs=10)
```
在上述代码中,模型被设计为二分类问题,用于判断图像中的像素是否属于受灾区域。这种方法可以快速部署用于灾害响应和评估。
### 4.5 挑战与机遇
尽管深度学习在图像分割领域取得了显著进展,但在某些应用中仍然面临挑战。例如,在医学图像分割中,由于病变的多样性,模型的泛化能力受到限制。此外,准确率、速度和资源消耗之间的平衡也是实际应用中需要考虑的问题。
#### 4.5.1 增强现实世界数据的代表性
为了训练出能够应对现实世界挑战的模型,需要增强训练数据的多样性,包括引入更多样的病变类型、不同的环境条件等。这需要跨学科的合作以及大规模、高质量数据集的构建。
#### 4.5.2 提高模型的泛化能力
模型的泛化能力是衡量其在未见数据上性能的重要指标。通过对抗性训练、迁移学习、元学习等技术,可以提高模型在新场景下的适应性和鲁棒性。
```python
# 使用对抗性训练增强模型泛化能力
# 这里假设我们已经有一个训练好的模型model和对应的损失函数loss
# 对抗性样本生成
from cleverhans.attacks import FastGradientMethod
fgm = FastGradientMethod(model)
adv_x = fgm.generate(model.input, eps=0.3)
# 使用对抗性样本对模型进行再训练
model.fit(adv_x, y_train, batch_size=32, epochs=10)
```
上面的示例使用了`cleverhans`库来生成对抗性样本,并利用这些样本对模型进行再训练,目的是提高模型的鲁棒性和泛化能力。
通过这些策略和技术的创新,我们能够不断提升图像分割的性能,使其更好地服务于实际应用。
# 5. 案例研究与性能比较
## 5.1 经典图像分割算法的性能对比
### 5.1.1 U-Net与其变体的性能比较
U-Net是医学图像分割领域广泛使用的一个网络结构,其名称来源于网络对称的U型结构。U-Net通过跳跃连接(skip connection)提高了在图像分割任务中对细节的捕捉能力。由于其在医疗图像分割任务中的杰出表现,众多的变体也在不断出现,以此来应对不同类型图像数据的挑战。U-Net的变体主要通过改进网络结构、添加注意力机制等方法来提升分割效果。
**U-Net变体的改进方向:**
1. **网络深度与宽度**:通过增加网络深度(层数)或宽度(每个层的卷积核数量),提高网络的学习能力。
2. **编码器-解码器结构**:U-Net采用的编码器-解码器架构使得网络可以有效地提取图像特征并保持空间维度信息,一些改进模型在此基础上进一步细化网络结构,比如引入密集连接(DenseNet)来提高特征传播效率。
3. **注意力机制**:引入注意力机制如SENet(Squeeze-and-Excitation Networks)能够使网络更加聚焦于重要的特征通道,从而提高分割的准确性。
### 5.1.2 Mask R-CNN与其他目标检测算法的比较
Mask R-CNN是在Faster R-CNN的基础上增加了一个分支,用于预测目标的掩码。与传统的目标检测算法相比,Mask R-CNN能够提供更精细的目标区域分割,因此在图像分割任务中表现更为出色。Mask R-CNN通过并行结构处理目标检测和实例分割,提高了处理速度和分割质量。
**Mask R-CNN的优势和应用场景:**
1. **实例级别的分割**:Mask R-CNN不仅能检测出图像中的目标,还能为每个检测到的目标生成高质量的分割掩码。
2. **实时性**:相比于一些专为分割设计的网络结构,Mask R-CNN在保持高精度的同时,仍然能够实现实时检测和分割。
3. **灵活性**:Mask R-CNN易于扩展,可以处理各种复杂场景下的图像分割问题。
### 5.1.3 比较评估方法
在对比不同图像分割算法的性能时,我们需要有一套客观的评价标准,常见的评价指标包括精确度(Precision)、召回率(Recall)、交并比(Intersection over Union, IoU)、F1分数和Dice系数等。
**主要性能指标详解:**
- **精确度**:指的是正确分割区域与算法预测所有区域的比率。
- **召回率**:指的是正确分割区域与真实所有区域的比率。
- **IoU**:预测分割区域和真实分割区域的交集与并集之比,是分割任务中最重要的评估指标之一。
- **F1分数**:精确度和召回率的调和平均数,是一个综合指标,用于衡量模型的精确度和完整性。
- **Dice系数**:与IoU相似,衡量的是两个样本集的相似度,常用于医学图像分割评价。
```python
# 示例代码:计算IoU
def IoU(box1, box2):
# box1和box2是两个列表,表示两个分割区域的坐标[x_min, y_min, x_max, y_max]
# 计算交集区域
intersection = max(0, min(box1[2], box2[2]) - max(box1[0], box2[0])) * max(0, min(box1[3], box2[3]) - max(box1[1], box2[1]))
# 计算并集区域
union = (box1[2] - box1[0]) * (box1[3] - box1[1]) + (box2[2] - box2[0]) * (box2[3] - box2[1]) - intersection
# 返回交并比
return intersection / union
```
在实际应用中,为了对比算法性能,往往需要在相同的测试集上运行不同算法,并计算出这些指标。一般还会使用P-R曲线(精确度-召回率曲线)或者PR AUC(精确度-召回率曲线下的面积)进行综合评价,以此来选择最适合的算法应用于特定场景。
## 5.2 应用案例分析
### 5.2.1 医学图像分割的挑战与机遇
医学图像分割一直是图像分割技术的重要应用领域,其面临的挑战和机遇并存。与自然图像不同,医学图像的数据具有更复杂的形态和结构,且往往对分割精度要求极高,因为这关系到最终的诊断结果和治疗计划。
**医学图像分割的主要挑战:**
1. **图像质量差异大**:不同的成像设备和技术可能导致图像质量和分辨率差异很大,对算法的泛化能力提出较高要求。
2. **类别不平衡**:医学图像中感兴趣的目标区域往往占据很小的比例,这导致了严重的类别不平衡问题。
3. **数据隐私和标注成本**:医学图像数据涉及患者隐私,难以公开共享,且高质量的标注需要医学专家的参与,成本很高。
**医学图像分割的机遇:**
1. **深度学习技术的快速发展**:卷积神经网络(CNN)和注意力机制等深度学习技术的发展为解决上述挑战提供了可能。
2. **大数据和预训练模型**:随着医疗数据量的增加和预训练模型的普及,训练出鲁棒性强、泛化能力好的医学图像分割模型成为可能。
### 5.2.2 自动驾驶中的图像分割技术应用
自动驾驶技术中,图像分割技术是感知系统的关键组成部分,它可以帮助车辆理解环境,从而做出准确的决策。例如,通过分割交通标志、道路线、行人等,自动驾驶系统可以预测和规划车辆的行驶路径。
**图像分割在自动驾驶中的应用:**
1. **车辆和行人检测**:准确地识别和分割车辆、行人在道路中的位置,是确保自动驾驶安全的重要前提。
2. **车道线识别**:车道线分割可以帮助车辆了解当前车道并保持车道行驶,同时识别偏离车道的行为。
3. **交通标志识别**:通过分割交通标志,系统可以识别各种交通信号,并做出相应的驾驶决策。
**自动驾驶图像分割的挑战:**
1. **实时性要求**:自动驾驶系统必须能够实时处理图像数据并作出快速响应。
2. **复杂多变的环境**:室外环境变化多端,图像分割算法需要在各种光照、天气条件下都能保持稳定。
3. **高准确性和鲁棒性**:图像分割结果需要非常准确,任何误差都可能导致严重的安全问题。
## 5.3 实验设计与结果解读
### 5.3.1 实验设计的要点
进行图像分割实验时,实验设计是获得有效结果的关键。合理的设计能够确保实验结果的可比性和可信性。
**实验设计的主要要点:**
1. **选择合适的评估数据集**:根据任务的需求选择具有代表性的数据集,并确保数据集中的图像质量和标注质量。
2. **使用统一的评价标准**:为了对比不同算法的性能,需要采用统一的评价指标进行评估。
3. **实验过程的可控性**:保证实验环境一致,比如使用相同的硬件设备、操作系统、软件库等,确保实验结果的公正性。
4. **考虑多种场景和条件**:实验设计应涵盖不同的场景和条件,以确保算法的泛化能力和鲁棒性。
### 5.3.2 结果的可视化与解读技巧
实验结果的可视化能够直观地展示算法的性能,有助于理解算法的优势和不足。
**结果可视化的方法:**
1. **混淆矩阵**:展示模型预测与真实情况的匹配程度,有助于分析模型的分类效果。
2. **分割结果图**:将模型的预测结果直接覆盖在原始图像上,可以直观地看出模型的分割效果。
3. **PR曲线和ROC曲线**:分别展示精确度和召回率、真正率和假正率的关系,有助于评估模型的整体性能。
```mermaid
graph TD;
A[开始] --> B[数据准备];
B --> C[模型选择];
C --> D[超参数调整];
D --> E[模型训练];
E --> F[性能评估];
F --> G[结果可视化];
G --> H[解读结果];
H --> I[结束];
```
在解读图像分割结果时,我们需要关注算法的精度、速度、鲁棒性等多个方面。尤其是在实际应用中,一个模型可能在特定场景下表现良好,但在其他场景下却表现不佳。因此,对结果的解读要结合实际应用场景,并对可能出现的问题进行深入分析。
以上是对第五章:案例研究与性能比较的详细介绍。在接下来的章节中,我们将深入探讨图像分割的未来趋势与发展,包括新技术的涌现、技术挑战的克服以及专家的见解和建议。
# 6. 未来趋势与发展
随着人工智能和深度学习技术的快速发展,图像分割技术也在不断进化,涌现了许多新的研究方向和应用领域。在未来,我们可以预期图像分割技术将解决更多现有挑战,并在各行业发挥更大的作用。
## 6.1 图像分割技术的未来方向
图像分割领域正在经历一场变革,新的学习范式和研究方向不断涌现,试图解决传统方法的不足。
### 6.1.1 零样本和少样本学习
零样本(Zero-shot)和少样本(Few-shot)学习是近年来机器学习领域的新趋势。在图像分割中,这些方法允许模型在几乎没有或只有极少数标注数据的情况下进行训练。通过学习已知类别的数据,模型能够推广到未知类别,大大减少了对标注数据的依赖。
### 6.1.2 自监督学习与半监督学习的进展
自监督学习利用未标注数据本身产生的监督信号进行学习,而半监督学习则结合少量标注数据和大量未标注数据。这些方法在图像分割中展示了巨大的潜力,能够在降低成本的同时,提高模型的泛化能力。
## 6.2 技术挑战与解决路径
尽管有许多令人兴奋的进展,图像分割技术仍面临不少挑战。在此,我们将探讨一些核心问题和可能的解决策略。
### 6.2.1 模型泛化能力的提升
泛化能力是衡量模型在未见数据上表现的重要指标。要提升模型的泛化能力,研究者们正在探索如何更好地设计网络结构,以及如何结合多任务学习和域自适应等技术。
### 6.2.2 实时处理与高精度分割的平衡
实时处理要求模型具有快速响应能力,而高精度分割则需要复杂的模型结构和大量的计算资源。解决这一矛盾需要从算法优化、硬件加速和模型压缩等多方面入手。
## 6.3 专家观点与建议
我们收集了一些行业专家和实践者在图像分割技术上的见解和建议,以帮助读者更好地理解当前的发展动态和未来趋势。
### 6.3.1 行业专家对图像分割技术的看法
专家们普遍认为,图像分割技术的发展应注重实际应用需求,比如在医疗、自动驾驶等领域。他们也强调了跨学科合作的重要性,以及从其他领域借鉴思想和技术的必要性。
### 6.3.2 实践者在分割技术上的经验分享
实践者建议,除了关注模型性能,工程师还应重视数据的质量、多样性和处理方式。此外,实现高效的模型部署和优化是将研究成果转化成实际产品的关键。
在实际应用中,图像分割技术仍需不断创新与改进,以满足日新月异的行业需求。随着算法的不断进步,我们可以期待这一领域在未来带来更多的可能性和突破。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了图像分割算法在计算机视觉中的关键作用。它提供了全面的指南,介绍了最新的评估方法和实践技巧,以比较图像分割算法的性能。此外,该专栏还深入研究了阈值技术、区域分割、边缘检测、聚类技术和深度学习在图像分割中的应用。它提供了专家见解,分析了挑战,并提出了优化策略。通过深入探讨全卷积网络 (FCN) 的革命性影响,该专栏为图像分割的未来发展指明了方向。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
嵌入式系统中的BMP应用挑战:格式适配与性能优化
# 摘要
本文综合探讨了BMP格式在嵌入式系统中的应用,以及如何优化相关图像处理与系统性能。文章首先概述了嵌入式系统与BMP格式的基本概念,并深入分析了BMP格式在嵌入式系统中的应用细节,包括结构解析、适配问题以及优化存储资源的策略。接着,本文着重介绍了BMP图像的处理方法,如压缩技术、渲染技术以及资源和性能优化措施。最后,通过具体应用案例和实践,展示了如何在嵌入式设备中有效利用BMP图像,并探讨了开发工具链的重要性。文章展望了高级图像处理技术和新兴格式的兼容性,以及未来嵌入式系统与人工智能结合的可能方向。
# 关键字
嵌入式系统;BMP格式;图像处理;性能优化;资源适配;人工智能
参考资
潮流分析的艺术:PSD-BPA软件高级功能深度介绍

# 摘要
电力系统分析在保证电网安全稳定运行中起着至关重要的作用。本文首先介绍了潮流分析的基础知识以及PSD-BPA软件的概况。接着详细阐述了PSD-BPA的潮流计算功能,包括电力系统的基本模型、潮流计算的数学原理以及如何设置潮流计算参数。本文还深入探讨了PSD-BPA的高级功
ECOTALK数据科学应用:机器学习模型在预测分析中的真实案例

# 摘要
本文对机器学习模型的基础理论与技术进行了综合概述,并详细探讨了数据准备、预处理技巧、模型构建与优化方法,以及预测分析案例研究。文章首先回顾了机器学习的基本概念和技术要点,然后重点介绍了数据清洗、特征工程、数据集划分以及交叉验证等关键环节。接
【Ubuntu 16.04系统更新与维护】:保持系统最新状态的策略
# 摘要
本文针对Ubuntu 16.04系统更新与维护进行了全面的概述,探讨了系统更新的基础理论、实践技巧以及在更新过程中可能遇到的常见问题。文章详细介绍了安全加固与维护的策略,包括安全更新与补丁管理、系统加固实践技巧及监控与日志分析。在备份与灾难恢复方面,本文阐述了
【光辐射测量教育】:IT专业人员的培训课程与教育指南

# 摘要
光辐射测量是现代科技中应用广泛的领域,涉及到基础理论、测量设备、技术应用、教育课程设计等多个方面。本文首先介绍了光辐射测量的基础知识,然后详细探讨了不同类型的光辐射测量设备及其工作原理和分类选择。接着,本文分析了光辐射测量技术及其在环境监测、农业和医疗等不同领域的应用实例。教育课程设计章节则着重于如何构建理论与实践相结合的教育内容,并提出了评估与反馈机制。最后,本文展望了光辐射测量教育的未来趋势,讨论了技术发展对教育内容和教
SSD1306在智能穿戴设备中的应用:设计与实现终极指南
# 摘要
SSD1306是一款广泛应用于智能穿戴设备的OLED显示屏,具有独特的技术参数和功能优势。本文首先介绍了SSD1306的技术概览及其在智能穿戴设备中的应用,然后深入探讨了其编程与控制技术,包括基本编程、动画与图形显示以及高级交互功能的实现。接着,本文着重分析了SSD1306在智能穿戴应用中的设计原则和能效管理策略,以及实际应用中的案例分析。最后,文章对SSD1306未来的发展方向进行了展望,包括新型显示技术的对比、市场分析以及持续开发的可能性。
# 关键字
SSD1306;OLED显示;智能穿戴;编程与控制;用户界面设计;能效管理;市场分析
参考资源链接:[SSD1306 OLE
RTC4版本迭代秘籍:平滑升级与维护的最佳实践
# 摘要
本文重点讨论了RTC4版本迭代的平滑升级过程,包括理论基础、实践中的迭代与维护,以及维护与技术支持。文章首先概述了RTC4的版本迭代概览,然后详细分析了平滑升级的理论基础,包括架构与组件分析、升级策略与计划制定、技术要点。在实践章节中,本文探讨了版本控制与代码审查、单元测试
分析准确性提升之道:谢菲尔德工具箱参数优化攻略

# 摘要
本文介绍了谢菲尔德工具箱的基本概念及其在各种应用领域的重要性。文章首先阐述了参数优化的基础理论,包括定义、目标、方法论以及常见算法,并对确定性与随机性方法、单目标与多目标优化进行了讨论。接着,本文详细说明了谢菲尔德工具箱的安装与配置过程,包括环境选择、参数配置、优化流程设置以及调试与问题排查。此外,通过实战演练章节,文章分析了案例应用,并对参数调优的实验过程与结果评估给出了具体指
PM813S内存管理优化技巧:提升系统性能的关键步骤,专家分享!
# 摘要
PM813S作为一款具有先进内存管理功能的系统,其内存管理机制对于系统性能和稳定性至关重要。本文首先概述了PM813S内存管理的基础架构,然后分析了内存分配与回收机制、内存碎片化问题以及物理与虚拟内存的概念。特别关注了多级页表机制以及内存优化实践技巧,如缓存优化和内存压缩技术的应用。通过性能评估指标和调优实践的探讨,本文还为系统监控和内存性能提
CC-LINK远程IO模块AJ65SBTB1现场应用指南:常见问题快速解决
# 摘要
CC-LINK远程IO模块作为一种工业通信技术,为自动化和控制系统提供了高效的数据交换和设备管理能力。本文首先概述了CC-LINK远程IO模块的基础知识,接着详细介绍了其安装与配置流程,包括硬件的物理连接和系统集成要求,以及软件的参数设置与优化。为应对潜在的故障问题,本文还提供了故障诊断与排除的方法,并探讨了故障解决的实践案例。在高级应用方面,文中讲述了如何进行编程与控制,以及如何实现系统扩展与集成。最后,本文强调了CC-LINK远程IO模块的维护与管理的重要性,并对未来技术发展趋势进行了展望。
# 关键字
CC-LINK远程IO模块;系统集成;故障诊断;性能优化;编程与控制;维护
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )