CUDA中的并行图像处理与图像算法优化
发布时间: 2024-01-16 22:17:22 阅读量: 82 订阅数: 37 

应用CUDA 图像处理算法
# 1. CUDA并行计算简介
## 1.1 CUDA架构与编程模型概述
CUDA(Compute Unified Device Architecture)是由NVIDIA开发的一种并行计算架构和编程模型。它允许开发者使用CUDA C/C++语言对NVIDIA的GPU进行并行计算,以提升计算性能。CUDA架构由多个处理器核心组成,每个核心可以同时执行多个线程。它采用了SIMD(Single Instruction Multiple Data)的执行模式,即同一个指令被多个线程同时执行。这种架构能够实现大规模并行计算,极大地提高了计算速度。
CUDA编程模型包括主机代码和设备代码。主机代码在CPU上运行,负责控制设备上的并行计算任务。设备代码在GPU上运行,执行实际的并行计算任务。主机和设备之间的数据传输由开发者手动管理,可以通过内存拷贝或者使用CUDA提供的异步内存操作来实现。
## 1.2 CUDA并行计算的基本概念和原理
CUDA并行计算的基本概念包括线程、线程块和网格。线程是最小的并行任务单元,一个线程对应一个并行计算任务。多个线程组成线程块,线程块是并行计算的基本单位。多个线程块组成网格,网格是并行计算的整体。
CUDA并行计算的原理是将并行计算任务分解为多个线程并行执行。每个线程执行相同的指令,但是处理的数据不同。线程之间可以通过共享内存进行通信,同一个线程块的线程之间也可以进行同步操作。通过合理的任务划分和数据分布,利用GPU的并行计算能力可以加速计算过程。
接下来的章节将重点介绍CUDA在图像处理中的并行实现、优化策略以及性能优化方法,以及实际应用中的案例分析。
# 2. 图像处理在CUDA中的并行实现
### 2.1 CUDA中的图像处理基础
在CUDA中进行图像处理,首先需要了解GPU与CPU的处理方式不同。GPU是由成千上万个小处理核心组成的并行处理器,对于图像处理这种需要大量计算的任务来说,GPU具有天然的优势。在CUDA中,图像数据通常被表示为二维数组,而且在处理图像时,每个像素通常可以独立处理,这正与GPU的并行特性相契合。
在CUDA中,对图像进行并行处理通常可以使用核函数(kernel)来实现,并在GPU上进行并行计算。通过编写适当的核函数,可以充分利用GPU的并行计算能力来加速图像处理任务。同时,CUDA还提供了丰富的图像处理函数和工具库,例如CUDA图像处理库(npp)和CUDA深度学习库(cuDNN),这些工具库为图像处理任务提供了便利的功能和算法。
### 2.2 图像处理中的并行算法设计和优化技巧
在设计并行图像处理算法时,需要考虑以下几个方面的优化技巧:
- 数据并行:将图像数据分割成小块,让每个线程处理一部分数据,以实现数据并行处理,充分利用GPU的并行计算能力。
- 内存访问优化:优化内存访问模式,尽量减少全局内存访问,尽可能使用共享内存来提高访问速度。
- 算法优化:针对特定的图像处理任务,设计高效的并行算法,减少不必要的计算和数据传输。
- 并行任务划分:合理划分并行任务,避免线程间的冲突和竞争,最大限度地提高并行计算效率。
- 线程束优化:合理配置线程束(warp)大小,充分发挥线程束级并行性。
通过以上优化技巧,可以有效地设计并行图像处理算法,并利用CUDA框架强大的并行计算能力来加速图像处理任务,提高算法效率和性能。
```python
# 示例:利用CUDA进行图像模糊处理的并行算法
import numpy as np
import cv2
import pycuda.driver as cuda
import pycuda.autoinit
from pycuda.compiler import SourceModule
# 1. 读取图像数据
image = cv2.imread('input.jpg', 0)
# 2. 定义核函数
mod = SourceModule("""
__global__ void blur_filter(unsigned char* input, unsigned char* output, int width, int height) {
int x = blockIdx.x * blockDim.x + threadIdx.x;
int y = blockIdx.y * blockDim.y + threadIdx.y;
if (x < width && y < height) {
int offset = y * width + x;
float blur_value = (input[offset] + input[offset - 1] + input[offset + 1] + input[offset - width] + input[offset + width]) / 5.0;
output[offset] = (unsigned char) blur_value;
}
}
""")
# 3. 调用核函数进行并行图像模糊处理
blur_filter = mod.get_function("blur_filter")
rows, cols = image.shape
block = (16, 16, 1)
grid = (int((cols + block[0] - 1) / block[0]), int((rows + block[1] - 1) / block[1]))
output = np.zeros_like(image)
blur_filter(cuda.In(image), cuda.Out(output), np.int32(cols), np.int32(rows), block=block, grid=grid)
# 4. 显示并保存处理结果
cv2.imwrite('output_blur.jpg', output)
cv2.imshow('Blurred Image', output)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
通过以上示例代码,展示了利用CUDA进行图像模糊处理的并行算法实现。首先是图像数据的准备和读取,然后定义了在GPU上执行的核函数,最后调用核函数进行并行计算,得到模糊处理后的图像结果。通过CUDA的并行计算能力,可以加速图像处理任务,并实现高效的图像

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏《CUDA编程:GPU并行计算与CUDA编程模型》深入探讨了CUDA编程在GPU并行计算领域的重要性和应用。从GPU加速计算基础概念与应用场景、CUDA并行编程基础到线程、块和网格的使用,再到CUDA中的各种优化技巧和性能提升方法,以及对并行算法设计与优化、深度学习与神经网络加速计算的讨论,逐一揭示了在CUDA编程模型下进行高效并行计算的关键要点。同时,结合实际应用实例,探讨了在数值计算、科学计算、图像处理、物理仿真以及高性能计算等领域中如何充分利用CUDA并行计算技术。通过对GPU性能分析、调优工具使用和并行算法库的介绍,为读者提供了全面的学习资源和实践指南。本专栏旨在帮助读者系统地掌握CUDA编程的相关知识,提升在并行计算领域的能力,促进并行计算技术在各个领域的应用和发展。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
Odroid XU4与Raspberry Pi比较分析
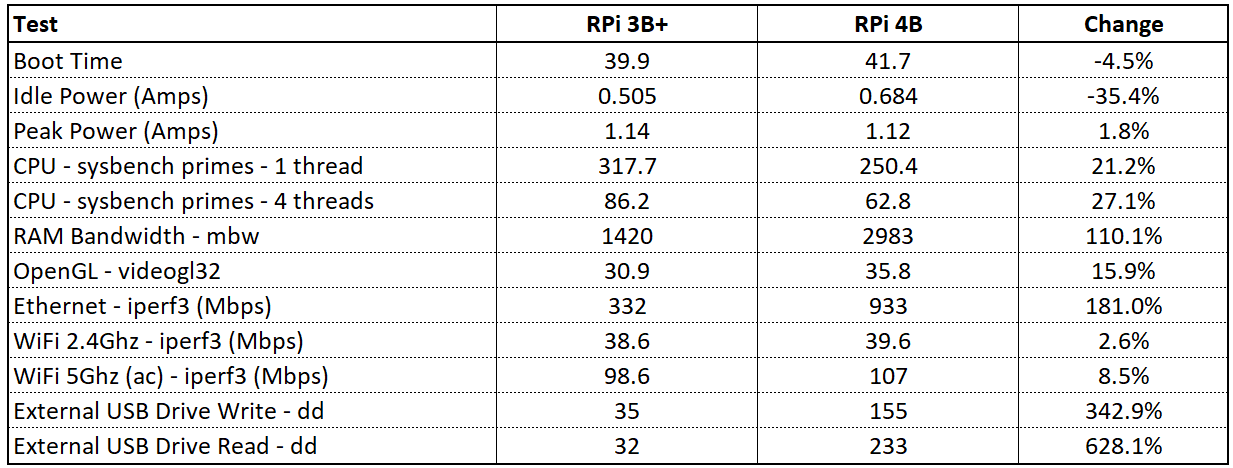
# 摘要
本文详细比较了Odroid XU4与Raspberry Pi的硬件规格、操作系统兼容性、性能测试与应用场景分析,并进行了成本效益分析。通过对比处理器性能、内存存储能力、扩展性和连接性等多个维度,揭示了两款单板计算机的优劣。文章还探讨了它们在图形处理、视频播放、科学计算和IoT应用等方面的实际表现,并对初次购买成本与长期运营维护成本进行了
WinRAR CVE-2023-38831漏洞全生命周期管理:从漏洞到补丁
# 摘要
WinRAR CVE-2023-38831漏洞的发现引起了广泛关注,本文对这一漏洞进行了全面概述和分析。我们深入探讨了漏洞的技术细节、成因、利用途径以及受影响的系统和应用版本,评估了漏洞的潜在风险和影响等级。文章还提供了详尽的漏洞应急响应策略,包括初步的临时缓解措施、长期修复
【数据可视化个性定制】:用Origin打造属于你的独特图表风格

# 摘要
随着数据科学的发展,数据可视化已成为传达复杂信息的关键手段。本文详细介绍了Origin软件在数据可视化领域的应用,从基础图表定制到高级技巧,再到与其他工具的整合,最后探讨了最佳实践和未来趋势。通过Origin丰富的图表类型、强大的数据处理工具和定制化脚本功能,用户能够深入分析数据并创建直观的图表。此外,本文还探讨了如何利用Origin的自动化和网络功能实现高效的数据可视化协作和分享。通
【初学者到专家】:LAPD与LAPDm帧结构的学习路径与进阶策略
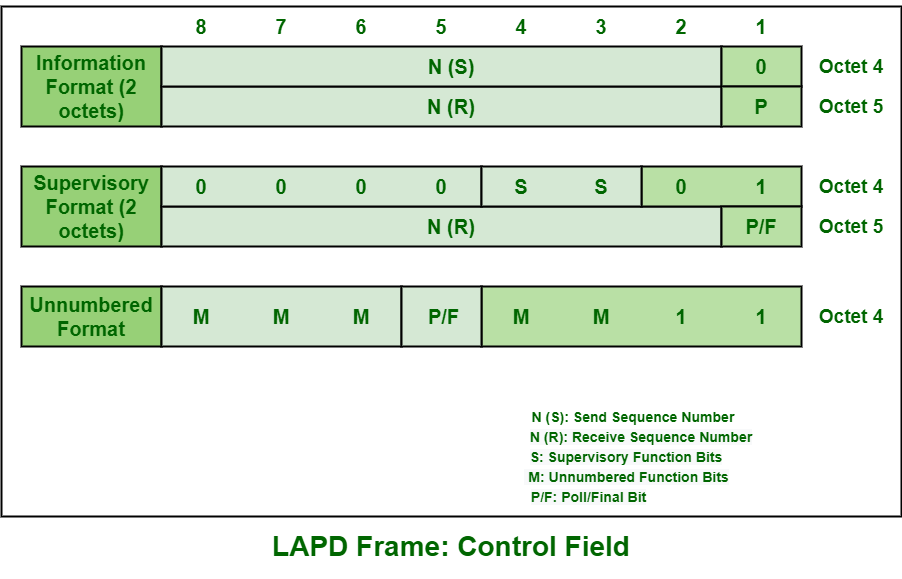
# 摘要
本文全面阐述了LAPD(Link Access Procedure on the D-channel)和LAPDm(LAPD modified)协议的帧结构及其相关理论,并深入探讨了这两种协议在现代通信网络中的应用和重要性。首先,对LAPD和LAPDm的帧结构进行概述,重点分析其组成部分与控制字段。接着,深入解析这两种协议的基础理论,包括历史发展、主要功能与特点
医学成像革新:IT技术如何重塑诊断流程
# 摘要
本文系统探讨了医学成像技术的历史演进、IT技术在其中的应用以及对诊断流程带来的革新。文章首先回顾了医学成像的历史与发展,随后深入分析了IT技术如何改进成像设备和数据管理,特别是数字化技术与PACS的应用。第三章着重讨论了IT技术如何提升诊断的精确性和效率,并阐述了远程医疗和增强现实技术在医学教育和手术规划中的应用。接着,文章探讨了数据安全与隐私保护的挑战,以及加密
TriCore工具链集成:构建跨平台应用的链接策略与兼容性解决

# 摘要
本文对TriCore工具链在跨平台应用构建中的集成进行了深入探讨。文章首先概述了跨平台开发的理论基础,包括架构差异、链接策略和兼容性问题的分析。随后,详细介绍了TriCore工具链的配置、优化以及链接策略的实践应用,并对链接过程中的兼容性
【ARM调试技巧大公开】:在ARMCompiler-506中快速定位问题

# 摘要
本文详述了ARM架构的调试基础,包括ARM Compiler-506的安装配置、程序的编译与优化、调试技术精进、异常处理与排错,以及调试案例分析与实战。文中不仅提供安装和配置ARM编译器的具体步骤,还深入探讨了代码优化、工具链使用、静态和动态调试、性能分析等技术细节。同时,本文还对ARM异常机制进行了解
【远程桌面工具稳定安全之路】:源码控制与版本管理策略
# 摘要
本文系统地介绍了远程桌面工具与源码控制系统的概念、基础和实战策略。文章首先概述了远程桌面工具的重要性,并详细介绍了源码控制系统的理论基础和工具分类,包括集中式与分布式源码控制工具以及它们的工作流程。接着,深入讨论了版本管理策略,包括版本号规范、分支模型选择和最佳实践。本文还探讨了远程桌面工具源码控制策略中的安全、权限管理、协作流程及持续集成。最后,文章展望了版本管理工具与
【网络连接优化】:用AT指令提升MC20芯片连接性能,效率翻倍(权威性、稀缺性、数字型)

# 摘要
随着物联网设备的日益普及,MC20芯片在移动网络通信中的作用愈发重要。本文首先概述了网络连接优化的重要性,接着深入探讨了AT指令与MC20芯片的通信原理,包括AT指令集的发展历史、结构和功能,以及MC20芯片的网络协议栈。基于理论分析,本文阐述了AT指令优化网络连接的理论基础,着重于网络延迟、吞吐量和连接质量的评估。实
【系统稳定性揭秘】:液态金属如何提高计算机物理稳定性
# 摘要
随着计算机硬件性能的不断提升,计算机物理稳定性面临着前所未有的挑战。本文综述了液态金属在增强计算机稳定性方面的潜力和应用。首先,文章介绍了液态金属的理论基础,包括其性质及其在计算机硬件中的应用。其次,通过案例分析,探讨了液态金属散热和连接技术的实践,以及液态金属在提升系统稳定性方面的实际效果。随后,对液态金属技术与传统散热材
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )