KUKA机器人轴配置:提升效率的五步法
发布时间: 2024-12-18 15:00:57 阅读量: 5 订阅数: 3 

KUKA机器人滑台配置
# 摘要
KUKA机器人在自动化和智能制造领域发挥着重要作用,其轴配置是决定机器人性能的关键因素之一。本文从基础知识入手,详细介绍了KUKA机器人的轴与关节定义、作用以及不同关节类型的特点。同时,探讨了轴配置对机器人精确度、重复定位、负载能力和速度的影响,并提供了理论计算方法。本文还分享了实际轴配置的步骤和技巧,强调了评估工作需求和条件的重要性,并展示了如何通过安装和校验优化轴配置。通过行业案例分析,本文量化分析了轴配置提升效率的效果,并提出了故障诊断与优化建议。最后,文章展望了人工智能在轴配置中应用的未来趋势,探讨了可持续发展与新材料技术的潜在贡献。
# 关键字
KUKA机器人;轴配置;关节类型;性能优化;故障诊断;人工智能;可持续发展
参考资源链接:[配置KUKA机器人外部轴步骤.pdf](https://wenku.csdn.net/doc/6412b79ebe7fbd1778d4aefc?spm=1055.2635.3001.10343)
# 1. KUKA机器人轴配置概述
工业机器人,特别是KUKA机器人,是现代制造业的关键组成部分。轴配置是机器人系统设计和功能实现的核心要素之一。它涉及对机器人动作能力的定义,包括运动范围、速度、负载能力和精确度。KUKA机器人的轴配置是由多个旋转和移动轴组成,每个轴对应机器人的一个自由度。不同的轴配置可以实现不同的运动模式,这对于机器人执行特定的任务至关重要。下一章将深入探讨这些基础知识,为读者提供全面的轴配置理解。
# 2. 理解机器人轴配置的基础知识
## 2.1 KUKA机器人的轴和关节
### 2.1.1 轴的定义和作用
在KUKA机器人的世界中,轴是实现机械臂动作的基本单元。每一个轴可以独立控制一个关节,这个关节可以是转动关节(例如,绕一个轴旋转)或者移动关节(例如,沿着一个导轨直线移动)。轴是机器人灵活性的源泉,它使机器人能够按照预定的路径移动,并完成复杂的任务。
为了更好地理解轴的作用,我们可以通过分析一个简单的例子来说明。假设一个机器人需要在三维空间内移动它的手臂末端到一个特定位置。这个动作通常需要多个轴协同运动:某些轴会负责前后移动(X轴),其他轴会控制左右移动(Y轴),还有轴会控制上下移动(Z轴)。如果任务还包括旋转动作,那么还需要额外的轴来实现这个目标。
轴的配置直接影响了机器人的工作范围,精度,以及运动速度。合适的轴配置能够使机器人工作更高效,而错误的配置则可能导致机器人无法完成既定任务或者需要额外的复杂控制算法。
### 2.1.2 关节类型及其特点
KUKA机器人的关节一般分为两种类型:转动关节和移动关节。转动关节允许机器人在一个或者多个轴上转动,通常由旋转电机驱动,使关节沿旋转轴线移动。移动关节则允许机器人在一个平面上或者沿着一条轴线线性移动。
- **转动关节(Revolute Joint)**:这是最常见的关节类型,用于提供旋转运动。它允许机器人手臂在空间中进行角度变化,类似于人类手臂的弯曲和旋转。
- **移动关节(Prismatic Joint)**:这种关节类型提供直线运动。虽然在标准的工业机器人配置中不太常见,但在某些特殊应用中,移动关节能够提供直线的精确定位。
不同的关节类型根据应用的不同和性能需求有不同的应用场景。例如,在空间有限的环境中,可能更倾向于使用转动关节,因为它们可以实现更为紧凑的结构布局。而移动关节在需要较长直线运动时更为有效,尤其在高速直线运动方面表现更为突出。
## 2.2 轴配置对机器人性能的影响
### 2.2.1 精确度和重复定位
在自动化生产线上,机器人需要精确地完成重复动作,因此轴配置在确保精确度和重复定位方面起着至关重要的作用。精确度通常是指机器人末端执行器(如焊枪或夹具)到达预定位置的能力,而重复定位指的是机器人在执行一系列动作后能准确返回到某个特定位置的能力。
精确度和重复定位能力取决于多种因素,包括但不限于:
- 轴的分辨率:即轴能检测到的最小移动单位。
- 控制系统的精确性:软件和硬件的配合是否能够实现精确定位。
- 机械误差:包括关节间隙、齿轮间隙等造成的误差。
- 热膨胀:轴在长时间工作后可能会因为热效应而发生变形,影响精度。
轴配置通过确定关节的数量和类型,以及它们的布局,来影响整体机器人的性能。例如,更多的轴通常意味着机器人在空间中可以实现更复杂的动作,但同时也增加了控制的复杂度和校准的难度。
### 2.2.2 负载能力和速度
机器人的轴配置也直接影响其负载能力和速度。轴配置必须在保证机器人能够处理预期负载的同时,还需确保机器人能够以足够快的速度执行任务。
- **负载能力**:轴配置必须确保每一个轴都有足够的力量来支撑机器人在操作过程中的负载,包括机器人的自重、末端执行器的重量以及任何可能承载的物品重量。过多的轴可能使机器人结构复杂化,而过少则可能限制其负载能力。
- **速度**:机器人的速度由其轴的运动速度决定。轴的运动速度受限于关节的扭矩输出,驱动系统的响应速度和电机的输出功率等因素。通常,轴数量较少的机器人能提供更快的动作速度,因为它们需要协调的关节数较少,从而减少了系统惯量和控制延迟。
正确平衡负载能力和速度是轴配置的一个关键挑战。在某些应用中,可能更偏重于速度,而在另一些应用中则可能更关注负载能力。通过优化轴配置,KUKA机器人能够更好地满足特定应用的需求。
## 2.3 轴配置的理论计算方法
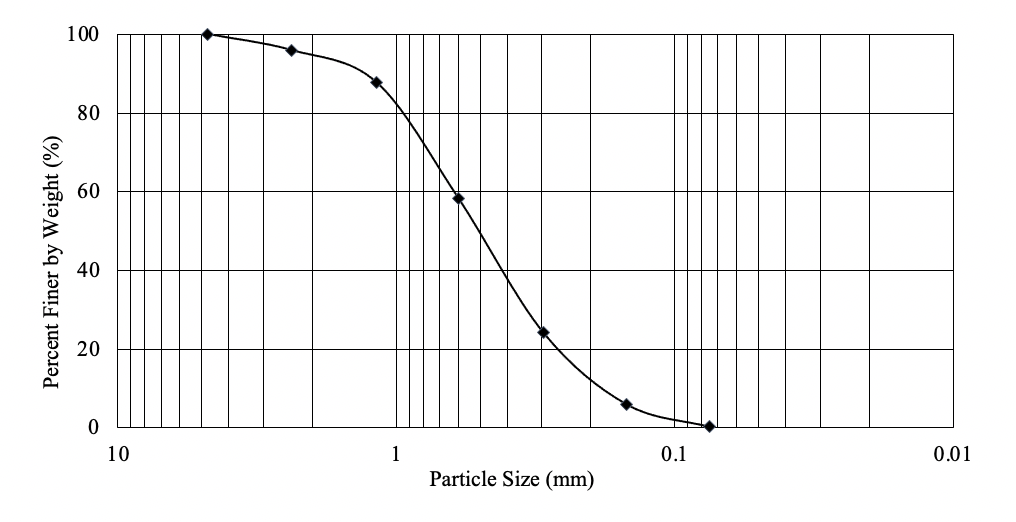
### 2.3.1 工作空间的分析
为了实现特定任务,需要选择恰当的轴配置以确保机器人能够覆盖所需的工作空间。工作空间的分析是轴配置设计的重要组成部分,它涉及到计算机器人手臂末端在空间中能够到达的所有位置。
计算机器人工作空间的一般步骤包括:
1. 定义每个关节的运动范围。
2. 利用运动学公式计算在关节运动范围内的所有可能的位置。
3. 分析并绘制机器人的可达区域,以直观表示其工作空间。
工作空间通常受制于关节的类型、数量以及它们之间的运动限制。因此,设计时需要根据任务要求确定合适的工作空间,并据此选择轴配置。
### 2.3.2 动力学和运动学的考量
动力学和运动学是轴配置设计中不可或缺的理论基础。动力学主要研究力和质量之间的关系以及它们对机器人运动的影响,而运动学则关心机械运动的几何特性,不考虑力的因素。
- **动力学分析**:通过动力学分析,可以了解在特定轴配置下,电机必须提供的力矩和功率。这对于确保机器人的稳定性、加速性和减速性至关重要。
- **运动学分析**:运动学分析用于确定各个关节的位置、速度和加速度,以便达到期望的末端执行器位置和姿态。运动学计算也用于实现路径规划和碰撞检测。
在实际设计中,这两个理论计算方法通常需要通过计算机辅助设计(CAD)和计算机辅助工程(CAE)软件来辅助完成。这样的软件能够通过算法模拟和优化轴配置,以达到预期的性能标准。
# 3. 实际轴配置的步骤与技巧
## 3.1 评估工作需求和条件
在实际应用中,为机器人选择和配置合适的轴是确保其性能和效率的关键步骤。本章节我们将深入探讨评估工作需求和条件的详细流程。
### 3.1.1 确定任务需求
机器人轴配置的首要步骤是详细了解任务需求。这包括分析所需的工作范围、负载能力、速度、精度、以及特定的应用环境。例如,在一个要求高精度装配的电子制造任务中,机器人需要有更精确的轴配置以确保零件的正确装配。
**代码块示例:**
```python
# 假设有一个简单的任务需求分析函数
def analyze_task_needs(workload, precision, speed, environment):
# 分析任务需求
# workload: 工作负载量
# precision: 精确度
# speed: 执行速度
# environment: 操作环境
analysis_result = "..."
return analysis_result
```
**逻辑分析及参数说明:**
此函数将任务的需求归纳为几个关键参数,实际应用中,这些参数将被进一步分析以确定最适合的轴配置。
### 3.1.2 分析操作环境和限制
在选择了合适的轴配置之后,接下来需要详细分析操作环境和可能的限制因素。例如,安装空间的限制、温度范围、电磁干扰等环境条件,都会对机器人的性能产生影响。对这些因素的深入理解能够帮助设计者制定出更为合适的轴配置方案。
**表格展示:**
| 环境因素 | 影响评估 | 需求调整 |
|-----------|----------|-----------|
| 空间限制 | 限制轴的尺寸和数量 | 选择更为紧凑的轴配置 |
| 温度范围 | 影响机械和电子部件的性能 | 选择耐高温的材料和部件 |
| 电磁干扰 | 可能导致定位不准确 | 采用屏蔽措施或选用抗干扰部件 |
## 3.2 选择合适的轴配置方案
在明确了工作需求和操作环境之后,接下来是选择合适的轴配置方案。
### 3.2.1 标准轴配置的选项
标准轴配置是机器人制造商提供的预定义配置方案,适用于大多数通用应用。选择标准配置时,需要考虑其兼容性、可扩展性和成本效益。
**mermaid 流程图:**
```mermaid
graph LR
A[确定任务需求] --> B[分析操作环境]
B --> C[选择标准轴配置]
C --> D[标准配置选项]
D --> |选项1| E[轴配置A]
D --> |选项2| F[轴配置B]
D --> |选项3| G[轴配置C]
```
**逻辑分析及参数说明:**
流程图清晰地展示了从确定任务需求到选择标准轴配置的决策过程。每一种标准配置都经过了细致的分析,以确保满足不同的工作需求。
### 3.2.2 定制轴配置的设计
如果标准轴配置无法满足特定的工作需求,设计师可能需要进行定制轴配置的设计。这通常涉及到更详细的设计过程,包括使用CAD软件进行3D建模,以及使用仿真软件进行性能验证。
**代码块示例:**
```python
# 定制轴配置的伪代码
def design_custom_axis(workload, precision, speed, environment):
# 设计定制轴配置
# workload: 工作负载量
# precision: 精确度
# speed: 执行速度
# environment: 操作环境
custom_design = "..."
return custom_design
```
**逻辑分析及参数说明:**
设计定制轴配置时,需要考虑多方面的参数。上述代码块虽然简化了实际的设计过程,但其逻辑表明了设计是基于多个参数和约束的。
## 3.3 轴配置的安装与校验
安装和校验是轴配置过程中的最后一步,但也是极为关键的步骤。
### 3.3.1 安装步骤和注意事项
安装轴配置时,需要按照制造商提供的安装手册进行。安装人员需要具备专业知识,确保所有的部件都按照技术规格正确安装。同时,安装过程中应该检查所有的电线和连接器是否牢固,以避免松动带来的安全隐患。
### 3.3.2 轴配置的校验方法
校验是确保轴配置按预期工作的重要环节。校验方法包括手动检查轴的运动,使用高精度的测量工具,以及执行自动化的校验程序。所有这些步骤的目的是确保机器人可以在预定的参数范围内稳定地执行任务。
通过深入分析实际轴配置的步骤和技巧,我们可以得出结论:选择合适的轴配置并正确安装校验,对于机器人性能的发挥是至关重要的。无论选择标准还是定制的轴配置,都需要严格遵守设计和安装的标准流程,以确保最佳的工作效率和长期的可靠运行。
# 4. 轴配置提升效率的案例分析
## 4.1 行业案例研究
### 4.1.1 制造业中的应用实例
在现代制造业中,机器人轴配置的优化是实现生产效率提升的关键因素。举例来说,考虑一个汽车制造商的车身涂装线,传统的涂装方式由于机器人移动范围和灵活性的限制,无法达到高效率且均匀的涂装效果。通过特定的轴配置调整,可以在保证涂装质量的同时,缩短涂装周期,提高生产线的运行效率。
在此案例中,制造商通过优化机器人的轴配置,增加了额外的轴以提供更大的灵活性和扩展的运动范围。通过在机器人轴配置中加入第五轴(摆动轴),涂装机器人可以更精确地覆盖车身的复杂几何形状,减少了涂装的重叠区域和不必要的重复动作。这不仅提高了涂层质量,还降低了涂料的浪费。
### 4.1.2 医疗领域的创新应用
在医疗领域,轴配置对于机器人执行精密操作至关重要。例如,在微创手术中,机器人的微小动作可以决定手术的成败。为了使手术机器人能在狭窄的体内空间内进行高精度的操作,其轴配置必须能够提供最优的运动路径和最小的运动误差。
以达芬奇手术系统为例,其多轴的设计允许机器人手臂以人类手腕无法达到的方式移动和旋转。轴配置的高度灵活性使得医生可以通过外部控制台操纵机械臂进行精细的切口、缝合和组织操作。这种配置的精确度使得手术创伤减小,患者恢复更快,医疗过程更加高效。
## 4.2 效率提升的量化分析
### 4.2.1 性能指标的测量
为了量化轴配置对效率的影响,需要选取适当的性能指标进行测量。常见的性能指标包括生产周期时间、故障率、重复定位精度、负载移动速度等。在涂装机器人案例中,通过比较轴配置优化前后的生产周期时间,可以清晰地看到效率的提升。
### 4.2.2 数据分析和效益评估
通过对性能指标的详细数据分析,可以得出轴配置优化对整体生产效益的贡献。数据收集后,可以运用统计方法和分析模型,如回归分析或时间序列分析,来评估轴配置改进所带来的经济效益。在制造业涂装线案例中,分析可能表明,轴配置优化不仅提升了生产速度,还减少了材料和能源的消耗,进而计算出投资回报率(ROI)。
## 4.3 故障诊断与优化建议
### 4.3.1 常见配置问题及其影响
在实际应用中,轴配置的问题可能导致机器人故障或性能下降。这些问题可能包括但不限于:轴运动不平滑、定位不准确或负载能力不足。例如,在医疗领域,如果一个手术机器人在关键操作中出现轴运动不平滑,可能会导致手术精度下降甚至危及患者安全。
### 4.3.2 解决方案和预防措施
一旦识别出轴配置问题,就需要制定解决方案。可能的解决方案包括重新校准轴参数、使用更适合的驱动器或马达、甚至是重新设计轴配置本身。此外,为预防这些问题,企业可以实施定期维护检查和使用故障预测模型,以实现早期警告和及时干预。
接下来的内容将包含更详细的技术解释和实际操作步骤。
## 实际代码块解析
为了更好地展示如何进行轴配置的优化,下面提供一段简化的代码示例。这段代码将模拟轴配置优化的基本步骤,并包含注释解释每一步的关键点。
```python
# Python 示例代码块
import robot轴配置库
# 创建机器人实例
robot = robot轴配置库.RobotArm()
# 初始化轴配置参数
initial_params = {
'axis1': {'max_angle': 90, 'min_angle': -90},
'axis2': {'max_angle': 120, 'min_angle': -120},
# ... 其他轴的参数
}
# 设置初始轴配置参数
robot.set_configuration_parameters(initial_params)
# 优化轴配置的函数
def optimize_axis_configuration(robot, new_params):
"""
优化机器人的轴配置。
:param robot: 机器人对象
:param new_params: 新的轴配置参数字典
"""
# 尝试应用新的配置参数
try:
robot.set_configuration_parameters(new_params)
# 对新的轴配置进行性能测试
performance_test = robot.perform_performance_test()
# 根据测试结果,决定是否接受新的配置
if performance_test > 0.9: # 假设性能指数大于0.9为可接受
robot.save_configuration() # 保存优化后的配置
return True
else:
return False
except Exception as e:
print("配置调整出现错误:", e)
return False
# 新的轴配置参数示例
new_axis_params = {
'axis1': {'max_angle': 180, 'min_angle': -180},
'axis2': {'max_angle': 150, 'min_angle': -150},
# ... 其他轴的新参数
}
# 调用优化函数
is_optimized = optimize_axis_configuration(robot, new_axis_params)
if is_optimized:
print("轴配置已优化成功")
else:
print("轴配置优化失败")
```
通过此代码块,我们可以看到如何通过软件模拟对机器人的轴配置进行优化。通过`set_configuration_parameters`方法,我们能够设定轴的配置参数,如角度限制,然后通过`optimize_axis_configuration`函数对这些配置进行测试和优化。这个过程包括尝试新参数,进行性能测试,如果测试结果满足一定标准,则保存优化后的配置。这是一个简单的例子,实际应用中轴配置优化会更加复杂,涉及到多个参数和性能指标。
请注意,上述代码仅作为说明性示例,实际的机器人轴配置优化会涉及到机器人学、控制理论和实际机械设计的复杂性。在进行轴配置优化时,还需要考虑到机械设计的限制、安全规范、成本效益分析等因素。
# 5. 未来趋势与发展方向
## 5.1 人工智能在轴配置中的应用
### 5.1.1 AI技术对轴配置优化的贡献
随着人工智能技术的快速发展,AI已经被集成到机器人轴配置的优化中,为提高机器人的效率、精确度和自适应能力提供了新的可能性。AI技术使机器人能够通过机器学习算法自主学习并适应复杂的工作环境。例如,通过深度学习,机器人可以识别和预测任务中的模式,自动调整其运动以提高性能。此外,利用强化学习,机器人可以在执行过程中通过试错来优化其行动策略,从而实现更佳的工作表现。
```python
# 示例伪代码展示AI算法在机器人控制中的应用
class RobotControlAI:
def __init__(self):
self.model = self.build_model()
def build_model(self):
# 构建机器学习模型,例如神经网络
pass
def observe_environment(self):
# 观察环境,收集数据
pass
def decide_action(self):
# 根据模型和观察到的环境数据决定动作
pass
def train_model(self, data):
# 使用新的数据训练模型
pass
# 创建机器人AI控制实例
robot_ai = RobotControlAI()
```
### 5.1.2 智能算法在机器人控制中的作用
智能算法在机器人控制中的应用不仅限于轴配置,它还包括路径规划、故障检测、异常处理等多个方面。在路径规划上,智能算法能计算出最优或近似最优的运动路径,减少运动时间和能源消耗。例如,蚁群算法或遗传算法等启发式搜索方法,在解决复杂路径问题上显示出了巨大的潜力。在异常处理上,AI算法能够通过模式识别快速检测到异常情况,并采取相应的措施来避免故障的发生。
## 5.2 可持续发展与轴配置
### 5.2.1 绿色机器人技术的概念
绿色机器人技术强调的是机器人在设计、制造和使用过程中的环境友好性。随着全球对于可持续发展的重视,轴配置在减少能源消耗、降低排放和使用环保材料方面起到了关键作用。轴配置优化可以减少机器人的能耗,延长其使用寿命,减少维护成本,并通过使用可回收材料和模块化设计,降低对环境的影响。
### 5.2.2 轴配置在环保中的应用案例
在环保领域中,一些轴配置的应用案例包括自动化的废物分类机器人、节省能源的智能工厂机器人等。这些机器人不仅提高了回收和生产的效率,而且减少了人工劳动,同时通过优化其轴配置减少能耗。例如,通过改进机器人的运动规划,可以减少不必要的运动和加速,从而降低能量消耗,符合绿色能源使用的原则。
## 5.3 展望未来技术革新
### 5.3.1 新材料和新型驱动技术
新材料的使用和新型驱动技术的发展为机器人轴配置的创新提供了基础。例如,采用碳纤维等先进复合材料可以降低机器人的重量,提高其灵活性和响应速度。此外,驱动技术的进步,如采用磁阻电机或压电驱动器,使得机器人的轴配置更加精准、高效且节能。
### 5.3.2 长期发展的预测与建议
在未来,随着技术的不断进步,预计机器人轴配置将会更加智能化和模块化。建议机器人制造商和用户应持续关注并采纳新兴技术,如量子计算和边缘计算,这些技术有潜力极大地提升机器人的处理能力和反应速度。同时,对轴配置的仿真和预测模型的研究也应不断深化,以确保机器人系统在面对不断变化的任务需求时能够快速适应和优化性能。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
STM32CubeMX速成课:中断配置与管理的终极指南

# 摘要
本文全面探讨了STM32微控制器的中断机制,从基础概念到高级管理技巧,涵盖了中断机制的理论基础、工具使用、编程实践和性能优化。首先介绍了STM32中断的基本概念和CubeMX工具的项目设置方法。随后,深入讲解了中断优先级配置、中断服务程序编写以及中断源管理的实践指南。文章还探讨了嵌套中断、动态优先级配置和中断调试等高级管理技巧,并提供了外设中断配置和实时性优
深入Mellanox SN2100架构

# 摘要
本文全面介绍了Mellanox SN2100网络交换机的设计和功能。首先概述了SN2100的基本特点,随后详细阐述了其硬件架构,包括核心硬件组件、冷却和电源系统,以及扩展性和兼容性。接着,文章深入探讨了Mellanox SN2100在网络技术与协议方面的能力,涉及以太网标准、RDMA
FPGA多路彩灯控制器设计课程:进阶篇,Verilog基础与模块化设计
# 摘要
本文旨在为电子工程师提供FPGA和Verilog的系统性入门与深入指南,涵盖从基础概念到高级应用实践的各个方面。首先,介绍了FPGA技术和Verilog语言的基础知识,包括Verilog的基本语法、行为建模与结构建模。接着,深入探讨了高级Verilog概念,如时序控制、同步机制、参数化模块、生成语句以及仿真与测试平台的构建。随后,本文详细阐述了模块化设计的理论和实践,包括模块
【MPU-6887快速入门】:手把手教你将传感器集成到项目中
# 摘要
MPU-6887传感器是集成了多种功能的微型传感器,广泛应用于需要精确动作捕捉和运动分析的领域。本文旨在提供一个全面的MPU-6887传感器的介绍,涵盖了其理论基础、工作原理、通信协议以及在不同项目中的集成和应用实践。通过对MPU-6887传感器的硬件连接和软件初始化的详细探讨,文章深入分析了数据采集与处理的流程,解析了数据以用于项目实施。本文还提供了智能运动装备和自动化控制系统中
【图表个性化秘籍】:Java图表样式定制的不传之法
# 摘要
随着数据可视化在各个领域的广泛应用,Java图表样式定制的重要性愈发凸显。本文首先从理论层面探讨了图表定制的必要性和应用场景,分析了图表美学、用户体验理论在图表设计中的作用,以及数据表达和用户交互在定制中的重要性。然后,文章转向实践技巧,提供了Java图表库的选择指南,并详细介绍了图表元素个性化定制和高级定制
【3DEC仿真进阶】:24小时精通材料属性设置、边界条件与本构模型选择
# 摘要
本文详细介绍了3DEC仿真软件在岩石工程中的应用,包括材料属性设置、边界条件应用以及本构模型选择的理论和实践操作。首先,概述了3DEC软件的基本功能和适用性,随后深入探讨了材料属性和边界条件设置的理论基础,并通过案例分析展示了其在实际应用中的重要性。本构模型作为模拟材料行为的关键,其选择和实现方法在确保仿真精度方面起到了决定性作用。文章最后通过综合案例分析,展示了如何运
【xterm快捷键 & 颜色方案】:成为终端定制大师的5个步骤
# 摘要
本文详细介绍了xterm终端仿真器的使用和定制技巧。首先,我们回顾了xterm的基础配置和快捷键使用,为用户提供了深入理解和应用快捷键的基础知识。随后,探讨了个性化xterm颜色方案的配置和定制,以及如何通过高级配置和脚本自动化来进一步提高工作效率。本文还涵盖了xterm与其他工具,尤其是窗口管理器和开发环境的整合,展示了如何利用xterm在不同使用场景下提
【用户交互体验优化】:揭秘uCGUI事件处理机制的流畅之道

# 摘要
本文全面探讨了uCGUI的事件处理机制,包括其基本概念、高级技巧以及性能调优。首先,介绍了uCGUI事件机制、消息注册与映射、优先级处理,进而分析了事件队列管理、复杂场景下的事件处理和UI响应优化。在实践案例部分,本文着重讲解了GUI界面交互设计、动态界面事件优化以及跨平台UI事件兼容性处理。最后,文章探讨了uCGUI事件处理性能监控与优化方法,以及未来事件处理技术的可能发展趋势,如A
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )