单片机程序设计实战秘籍:循序渐进,打造你的单片机项目
发布时间: 2024-07-10 01:05:27 阅读量: 50 订阅数: 30 

无需编写任何代码即可创建应用程序:Deepseek-R1 和 RooCode AI 编码代理.pdf

# 1. 单片机程序设计基础
单片机是一种集成了中央处理器、存储器和输入/输出端口等部件于一体的微型计算机。它具有体积小、功耗低、成本低等优点,广泛应用于工业控制、消费电子、医疗设备等领域。
单片机程序设计是利用单片机内部的资源,通过编写程序来控制单片机执行特定任务。单片机程序设计涉及硬件基础、编程语言、开发环境搭建等方面。
### 1.1 单片机架构和工作原理
单片机通常采用哈佛架构,即程序存储器和数据存储器是分开的。单片机的工作原理是:程序从程序存储器中取指,指令译码后执行,执行结果存储在数据存储器中。
# 2. 单片机程序设计实践
### 2.1 单片机硬件基础
#### 2.1.1 单片机架构和工作原理
单片机是一种集成化的微型计算机,其内部包含了处理器、存储器、输入输出接口等多个模块,能够独立完成特定任务。单片机的架构通常包括以下几个部分:
- **处理器**:负责执行指令,处理数据,是单片机的核心部件。
- **存储器**:分为程序存储器和数据存储器,用于存储程序代码和数据。
- **输入输出接口**:用于与外部设备进行数据交换,包括GPIO、串口、I2C、SPI等。
单片机的基本工作原理如下:
1. **取指**:处理器从程序存储器中读取指令。
2. **译码**:处理器对指令进行译码,确定要执行的操作。
3. **执行**:处理器根据指令执行相应的操作,如数据处理、控制流跳转等。
4. **存储**:处理器将执行结果写入数据存储器。
#### 2.1.2 常用单片机型号和特性
市面上有众多单片机型号,不同型号的单片机具有不同的特性,如性能、存储容量、外设接口等。常用的单片机型号包括:
| 型号 | 架构 | 内核 | 时钟频率 | 存储容量 | 外设接口 |
|---|---|---|---|---|---|
| STM32F103 | ARM Cortex-M3 | 72MHz | 64KB Flash | 20KB SRAM | GPIO、UART、I2C、SPI |
| ESP32 | Xtensa LX6 | 240MHz | 520KB Flash | 520KB SRAM | GPIO、UART、I2C、SPI、Wi-Fi、蓝牙 |
| ATmega328P | AVR | 8MHz | 32KB Flash | 2KB SRAM | GPIO、UART、I2C、SPI |
| MSP430G2553 | MSP430 | 16MHz | 16KB Flash | 2KB SRAM | GPIO、UART、I2C |
### 2.2 单片机编程语言
#### 2.2.1 汇编语言简介
汇编语言是一种低级编程语言,它直接操作单片机的寄存器和指令集,具有执行效率高、代码体积小等优点。汇编语言的指令与单片机的硬件结构密切相关,需要对单片机的架构和指令集有深入的了解。
以下是一个简单的汇编语言程序,用于在单片机的GPIO端口上输出一个高电平:
```assembly
; 设置GPIO端口为输出模式
MOV R1, #0x01
MOV R2, #0x00
MOV R3, #0x00
MOV R4, #0x00
MOV R5, #0x00
MOV R6, #0x00
MOV R7, #0x00
MOV R8, #0x00
MOV R9, #0x00
MOV R10, #0x00
MOV R11, #0x00
MOV R12, #0x00
MOV R13, #0x00
MOV R14, #0x00
MOV R15, #0x00
MOV R16, #0x00
MOV R17, #0x00
MOV R18, #0x00
MOV R19, #0x00
MOV R20, #0x00
MOV R21, #0x00
MOV R22, #0x00
MOV R23, #0x00
MOV R24, #0x00
MOV R25, #0x00
MOV R26, #0x00
MOV R27, #0x00
MOV R28, #0x00
MOV R29, #0x00
MOV R30, #0x00
MOV R31, #0x00
; 设置GPIO端口输出高电平
MOV R1, #0x01
MOV R2, #0x00
MOV R3, #0x00
MOV R4, #0x00
MOV R5, #0x00
MOV R6, #0x00
MOV R7, #0x00
MOV R8, #0x00
MOV R9, #0x00
MOV R10, #0x00
MOV R11, #0x00
MOV R12, #0x00
MOV R13, #0x00
MOV R14, #0x00
MOV R15, #0x00
MOV R16, #0x00
MOV R17, #0x00
MOV R18, #0x00
MOV R19, #0x00
MOV R20, #0x00
MOV R21, #0x00
MOV R22, #0x00
MOV R23, #0x00
MOV R24, #0x00
MOV R25, #0x00
MOV R26, #0x00
MOV R27, #0x00
MOV R28, #0x00
MOV R29, #0x00
MOV R30, #0x00
MOV R31, #0x00
; 循环输出高电平
MOV R1, #0x01
MOV R2, #0x00
MOV R3, #0x00
MOV R4, #0x00
MOV R5, #0x00
MOV R6, #0x00
MOV R7, #0x00
MOV R8, #0x00
MOV R9, #0x00
MOV R10, #0x00
MOV R11, #0x00
MOV R12, #0x00
MOV R13, #0x00
MOV R14, #0x00
MOV R15, #0x00
MOV R16, #0x00
MOV R17, #0x00
MOV R18, #0x00
MOV R19, #0x00
MOV R20, #0x00
MOV R21, #0x00
MOV R22, #0x00
MOV R23, #0x00
MOV R24, #0x00
MOV R25, #0x00
MOV R26, #0x00
MOV R27, #0x00
MOV R28, #0x00
MOV R29, #0x00
MOV R30, #0x00
MOV R31, #0x00
```
#### 2.2.2 C语言在单片机中的应用
C语言是一种高级编程语言,它具有可移植性好、易于理解等优点。C语言在单片机中得到广泛应用,它可以生成高效的代码,并且易于与汇编语言结合使用。
以下是一个用C语言编写的程序,用于在单片机的GPIO端口上输出一个高电平:
```c
#include <stdint.h>
int main() {
// 设置GPIO端口为输出模式
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Pin = GPIO_PIN_1;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_Init(GPIOA, &GPIO_InitStruct);
// 设置GPIO端口输出高电平
GPIO_SetBits(GPIOA, GPIO_PIN_1);
while (1) {
// 循环输出高电平
}
}
```
# 3. 单片机外围电路设计
### 3.1 单片机输入输出接口
#### 3.1.1 GPIO原理和配置
**GPIO(通用输入输出)**是单片机与外界交互的重要接口,用于连接各种传感器、显示器和控制设备。GPIO端口可以配置为输入或输出模式,并支持多种电气特性,如推挽输出、开漏输出和上拉/下拉电阻。
**GPIO原理:**
* GPIO端口连接到单片机的内部寄存器,称为GPIO寄存器。
* GPIO寄存器中的每个位对应一个GPIO引脚。
* 通过设置GPIO寄存器的位值,可以控制GPIO引脚的电平(高电平或低电平)。
* GPIO引脚可以连接到外部设备,如传感器、显示器或控制设备。
**GPIO配置:**
* GPIO引脚的配置通常通过单片机的寄存器进行。
* 寄存器中包含以下配置选项:
* **方向配置:**设置引脚为输入或输出模式。
* **电气特性配置:**设置引脚的电气特性,如推挽输出、开漏输出或上拉/下拉电阻。
* **中断配置:**设置引脚是否触发中断。
#### 3.1.2 中断和定时器应用
**中断**是一种硬件机制,当特定事件发生时,它会暂停当前正在执行的程序并跳转到一个称为中断服务程序(ISR)的特殊代码段。中断用于处理紧急事件,如外部中断(来自传感器或按钮)或定时器溢出。
**定时器**是一种硬件外设,用于生成精确的时间间隔。定时器可以用于各种应用,如:
* **定时:**生成定期中断,用于执行定时任务。
* **计数:**计数外部事件,如按钮按下或脉冲信号。
* **波形生成:**生成方波、三角波或正弦波等波形。
**中断和定时器应用示例:**
* **按键检测:**使用外部中断检测按钮按下,并触发ISR来处理按键事件。
* **定时任务:**使用定时器生成定期中断,用于更新显示器或控制电机。
* **脉冲计数:**使用定时器计数外部脉冲信号,用于测量转速或流量。
### 3.2 单片机通信接口
#### 3.2.1 串口通信原理和应用
**串口通信**是一种异步通信协议,用于在两台设备之间传输数据。串口通信使用两条线:一条用于发送数据(TX),一条用于接收数据(RX)。
**串口通信原理:**
* 数据以串行方式传输,即一次一位。
* 数据传输速度由波特率决定,单位为比特/秒。
* 数据帧包含以下信息:起始位、数据位、奇偶校验位(可选)和停止位。
* 发送方和接收方必须使用相同的波特率和数据帧格式。
**串口通信应用:**
* **调试:**与单片机进行通信,用于调试和配置。
* **数据传输:**与外部设备交换数据,如传感器、显示器或其他单片机。
* **网络通信:**使用串口作为网络接口,连接到其他设备或网络。
#### 3.2.2 I2C和SPI通信技术
**I2C(Inter-Integrated Circuit)**和**SPI(Serial Peripheral Interface)**是两种常用的同步通信协议。
**I2C通信:**
* 使用两条线:一条用于数据(SDA),一条用于时钟(SCL)。
* 支持多主机和多从机通信。
* 数据传输速度较慢,适合低速应用。
**SPI通信:**
* 使用四条线:一条用于时钟(SCLK),一条用于数据输入(MOSI),一条用于数据输出(MISO),一条用于片选(CS)。
* 支持全双工通信。
* 数据传输速度较快,适合高速应用。
**I2C和SPI通信应用:**
* **传感器通信:**连接各种传感器,如温度传感器、湿度传感器或加速度传感器。
* **显示器控制:**控制液晶显示器(LCD)或有机发光二极管(OLED)显示器。
* **数据存储:**连接EEPROM或闪存芯片,用于存储数据。
### 3.3 单片机模拟电路设计
#### 3.3.1 模数转换器原理和应用
**模数转换器(ADC)**是一种硬件外设,用于将模拟信号(如电压或电流)转换为数字信号。ADC广泛用于各种应用中,如数据采集、传感器测量和控制系统。
**ADC原理:**
* ADC将模拟信号采样并将其转换为数字值。
* 采样速率由ADC的采样频率决定。
* ADC的分辨率由其位数决定,表示它可以区分的最小电压或电流变化。
**ADC应用:**
* **传感器测量:**测量温度、压力、湿度或其他物理量。
* **数据采集:**采集来自传感器或其他设备的模拟数据。
* **控制系统:**将模拟信号转换为数字信号,用于控制系统中的反馈回路。
#### 3.3.2 滤波和放大电路设计
**滤波电路**用于去除模拟信号中的噪声和干扰。滤波电路可以是低通滤波器、高通滤波器或带通滤波器,具体取决于需要去除的噪声频率。
**放大电路**用于放大模拟信号的幅度。放大电路可以是反相放大器或同相放大器,具体取决于所需的放大类型。
**滤波和放大电路应用:**
* **传感器信号调理:**滤除传感器信号中的噪声并放大其幅度,以提高测量精度。
* **音频信号处理:**滤除音频信号中的杂音并放大其音量。
* **控制系统:**放大反馈信号的幅度,以提高控制系统的稳定性和精度。
# 4 单片机项目实战
### 4.1 单片机控制LED闪烁
#### 4.1.1 程序设计和实现
**代码块:**
```c
#include <reg51.h>
void main() {
while (1) {
P1 = 0x01; // LED亮
delay(500); // 延时500ms
P1 = 0x00; // LED灭
delay(500); // 延时500ms
}
}
void delay(unsigned int ms) {
unsigned int i, j;
for (i = 0; i < ms; i++) {
for (j = 0; j < 110; j++);
}
}
```
**逻辑分析:**
* 主函数 `main()` 中,程序进入无限循环。
* 在循环中,设置 P1 端口为 0x01,使 LED 亮起。
* 调用 `delay()` 函数延时 500ms。
* 然后,设置 P1 端口为 0x00,使 LED 熄灭。
* 再次调用 `delay()` 函数延时 500ms。
* `delay()` 函数使用嵌套循环实现延时,每层循环执行一次大约 1μs。
#### 4.1.2 电路搭建和调试
**电路图:**
[Image of LED blinking circuit]
**调试步骤:**
1. 将单片机芯片插入电路板。
2. 连接电源和 LED。
3. 将程序下载到单片机。
4. 观察 LED 是否正常闪烁。
5. 如果 LED 不闪烁,检查电路连接和程序是否正确。
### 4.2 单片机温度检测系统
#### 4.2.1 温度传感器原理和选型
**温度传感器原理:**
* 温度传感器将温度转换为电信号。
* 常见类型:热敏电阻、热电偶、二极管温度传感器。
**选型:**
* 考虑测量范围、精度、响应时间、成本。
* 常用单片机温度传感器:LM35、DS18B20。
#### 4.2.2 程序设计和数据处理
**代码块:**
```c
#include <reg51.h>
#include <intrins.h>
#define LM35_PIN P1_0
void main() {
unsigned int temp;
while (1) {
temp = (P1_0 >> 4) * 10; // 读取温度传感器数据
temp = temp * 5 / 4; // 转换为摄氏度
_delay_ms(1000); // 延时1s
}
}
```
**逻辑分析:**
* 主函数 `main()` 中,程序进入无限循环。
* 在循环中,读取温度传感器数据并将其存储在变量 `temp` 中。
* 将读取到的数据转换为摄氏度。
* 调用 `_delay_ms()` 函数延时 1s。
### 4.3 单片机电机控制系统
#### 4.3.1 电机驱动原理和电路设计
**电机驱动原理:**
* 电机驱动器将电信号转换为驱动电机的功率。
* 常见类型:H 桥驱动器、PWM 驱动器。
**电路设计:**
* 根据电机功率和驱动方式选择电机驱动器。
* 设计电机控制电路,包括电机连接、驱动器控制、保护电路。
#### 4.3.2 程序设计和控制算法
**代码块:**
```c
#include <reg51.h>
#define MOTOR_PIN P1_0
void main() {
unsigned int duty_cycle = 50; // 占空比
while (1) {
P1_0 = duty_cycle; // 设置占空比
_delay_ms(10); // 延时10ms
}
}
```
**逻辑分析:**
* 主函数 `main()` 中,程序进入无限循环。
* 在循环中,设置电机驱动器的占空比。
* 调用 `_delay_ms()` 函数延时 10ms。
# 5. 单片机程序优化
### 5.1 单片机程序优化原则
#### 5.1.1 代码优化和内存管理
- **代码优化:**
- 减少不必要的代码冗余,使用宏定义、函数调用等方式简化代码。
- 优化循环结构,避免不必要的循环嵌套和分支跳转。
- 使用汇编语言编写关键代码段,提高执行效率。
- **内存管理:**
- 合理分配内存空间,避免内存溢出或浪费。
- 使用动态内存分配机制,根据需要动态分配和释放内存。
- 优化数据结构,减少内存占用。
#### 5.1.2 功耗优化和电源管理
- **功耗优化:**
- 选择低功耗的单片机型号和外围器件。
- 优化程序算法,减少不必要的计算和数据处理。
- 使用睡眠模式和唤醒机制,降低功耗。
- **电源管理:**
- 设计合理的电源电路,保证单片机稳定供电。
- 使用稳压器和滤波器,消除电源噪声和干扰。
- 优化电源开关,减少不必要的功耗。
### 5.2 单片机程序调试技巧
#### 5.2.1 常见问题和解决方法
| 问题 | 解决方法 |
|---|---|
| 程序无法运行 | 检查硬件连接、程序语法和编译器设置 |
| 程序运行异常 | 使用调试器逐行执行程序,分析异常原因 |
| 程序占用过多内存 | 优化代码和数据结构,减少内存占用 |
| 程序功耗过高 | 优化算法、使用低功耗模式和电源管理 |
#### 5.2.2 调试工具和技巧
- **调试器:**
- 使用单片机专用调试器,如JTAG或SWD。
- 调试器可以逐行执行程序,设置断点,查看寄存器和内存数据。
- **逻辑分析仪:**
- 使用逻辑分析仪分析单片机信号,如数据总线、地址总线和控制信号。
- 逻辑分析仪可以帮助定位硬件故障和程序执行问题。
- **仿真器:**
- 使用单片机仿真器,在计算机上仿真单片机运行。
- 仿真器可以方便地调试程序,无需实际硬件。
# 6. 单片机项目开发流程
### 6.1 单片机项目需求分析
#### 6.1.1 项目背景和需求调研
在单片机项目开发之前,需要进行充分的项目背景和需求调研,了解项目的具体目标、功能要求、使用场景、环境限制等信息。需求调研可以通过以下步骤进行:
1. **收集需求:**与项目相关方沟通,收集项目需求,包括功能、性能、可靠性、成本等方面。
2. **分析需求:**对收集到的需求进行分析,识别需求之间的依赖关系和冲突,明确项目的主要目标和约束条件。
3. **制定需求规格说明书:**将分析后的需求整理成需求规格说明书,明确项目的功能、性能、接口、环境等要求。
#### 6.1.2 系统设计和架构规划
基于需求调研结果,进行系统设计和架构规划,确定项目的整体结构、模块划分、硬件和软件架构等。系统设计和架构规划需要考虑以下因素:
1. **模块化设计:**将项目分解成独立的模块,提高代码的可重用性和维护性。
2. **硬件和软件架构:**确定项目中硬件和软件的划分,选择合适的单片机型号、外围电路和软件开发平台。
3. **通信和数据流:**设计项目中不同模块之间的通信机制和数据流,确保数据在模块之间高效传输。
### 6.2 单片机项目设计和实现
#### 6.2.1 硬件电路设计和元器件选型
根据系统设计和架构规划,进行硬件电路设计和元器件选型。硬件电路设计需要考虑以下方面:
1. **元器件选型:**根据项目需求选择合适的单片机、外围电路元器件,如传感器、显示器、通信模块等。
2. **电路设计:**设计硬件电路原理图,包括电源、时钟、输入输出接口、通信接口等电路。
3. **PCB设计:**将原理图转换为PCB布局,设计PCB板,考虑电路板的尺寸、层数、走线等因素。
#### 6.2.2 软件程序设计和算法实现
根据系统设计和架构规划,进行软件程序设计和算法实现。软件程序设计需要考虑以下方面:
1. **算法设计:**根据项目需求设计算法,实现项目的功能。
2. **代码编写:**使用合适的编程语言编写代码,实现算法。
3. **调试和测试:**对代码进行调试和测试,确保代码的正确性和可靠性。
### 6.3 单片机项目测试和维护
#### 6.3.1 项目测试和验证方法
在项目开发完成后,需要进行项目测试和验证,确保项目满足需求规格说明书的要求。测试和验证方法包括:
1. **单元测试:**对每个模块进行独立测试,验证其功能和性能。
2. **集成测试:**将各个模块集成在一起,进行系统级测试,验证系统整体功能和性能。
3. **验收测试:**由项目相关方参与,对项目进行验收测试,验证项目是否满足需求。
#### 6.3.2 项目维护和更新策略
项目开发完成后,需要制定项目维护和更新策略,确保项目长期稳定运行。维护和更新策略包括:
1. **版本控制:**使用版本控制系统管理项目代码,方便版本回退和更新。
2. **文档更新:**及时更新项目文档,包括需求规格说明书、设计文档、代码注释等。
3. **持续集成:**建立持续集成流程,自动构建、测试和部署代码,提高项目维护效率。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
欢迎来到单片机应用入门程序设计专栏!本专栏旨在为零基础读者提供全面的单片机程序设计指南。从基础原理到实战应用,我们将循序渐进地带领你掌握单片机程序设计的核心技术。
本专栏涵盖了单片机程序设计的各个方面,包括:
* 零基础入门指南
* 程序设计基础精解
* 实战秘籍和陷阱规避
* 性能优化指南
* 数据结构与算法
* 中断处理机制
* 定时器应用
* 串口通信
* I/O 操作
* 存储器管理
* 异常处理
* 调试技巧
* 仿真技术
* 嵌入式操作系统
* 低功耗设计
* 安全设计
* 无线通信技术
* 图像处理技术
* 语音识别技术
通过阅读本专栏,你将能够打造自己的单片机项目,掌握单片机程序设计的精髓,并将其应用于实际场景中。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【Windows系统性能升级】:一步到位的WinSXS清理操作手册
# 摘要
本文针对Windows系统性能升级提供了全面的分析与指导。首先概述了WinSXS技术的定义、作用及在系统中的重要性。其次,深入探讨了WinSXS的结构、组件及其对系统性能的影响,特别是在系统更新过程中WinSXS膨胀的挑战。在此基础上,本文详细介绍了WinSXS清理前的准备、实际清理过程中的方法、步骤及
Lego性能优化策略:提升接口测试速度与稳定性
# 摘要
随着软件系统复杂性的增加,Lego性能优化变得越来越重要。本文旨在探讨性能优化的必要性和基础概念,通过接口测试流程和性能瓶颈分析,识别和解决性能问题。文中提出多种提升接口测试速度和稳定性的策略,包括代码优化、测试环境调整、并发测试策略、测试数据管理、错误处理机制以及持续集成和部署(CI/CD)的实践。此外,本文介绍了性能优化工具和框架的选择与应用,并
UL1310中文版:掌握电源设计流程,实现从概念到成品

# 摘要
本文系统地探讨了电源设计的全过程,涵盖了基础知识、理论计算方法、设计流程、实践技巧、案例分析以及测试与优化等多个方面。文章首先介绍了电源设计的重要性、步骤和关键参数,然后深入讲解了直流变换原理、元件选型以及热设计等理论基础和计算方法。随后,文章详细阐述了电源设计的每一个阶段,包括需求分析、方案选择、详细设计、仿真
Redmine升级失败怎么办?10分钟内安全回滚的完整策略
# 摘要
本文针对Redmine升级失败的问题进行了深入分析,并详细介绍了安全回滚的准备工作、流程和最佳实践。首先,我们探讨了升级失败的潜在原因,并强调了回滚前准备工作的必要性,包括检查备份状态和设定环境。接着,文章详解了回滚流程,包括策略选择、数据库操作和系统配置调整。在回滚完成后,文章指导进行系统检查和优化,并分析失败原因以便预防未来的升级问题。最后,本文提出了基于案例的学习和未来升级策
频谱分析:常见问题解决大全

# 摘要
频谱分析作为一种核心技术,对现代电子通信、信号处理等领域至关重要。本文系统地介绍了频谱分析的基础知识、理论、实践操作以及常见问题和优化策略。首先,文章阐述了频谱分析的基本概念、数学模型以及频谱分析仪的使用和校准问题。接着,重点讨论了频谱分析的关键技术,包括傅里叶变换、窗函数选择和抽样定理。文章第三章提供了一系列频谱分析实践操作指南,包括噪声和谐波信号分析、无线信号频谱分析方法及实验室实践。第四章探讨了频谱分析中的常见问题和解决
SECS-II在半导体制造中的核心角色:现代工艺的通讯支柱
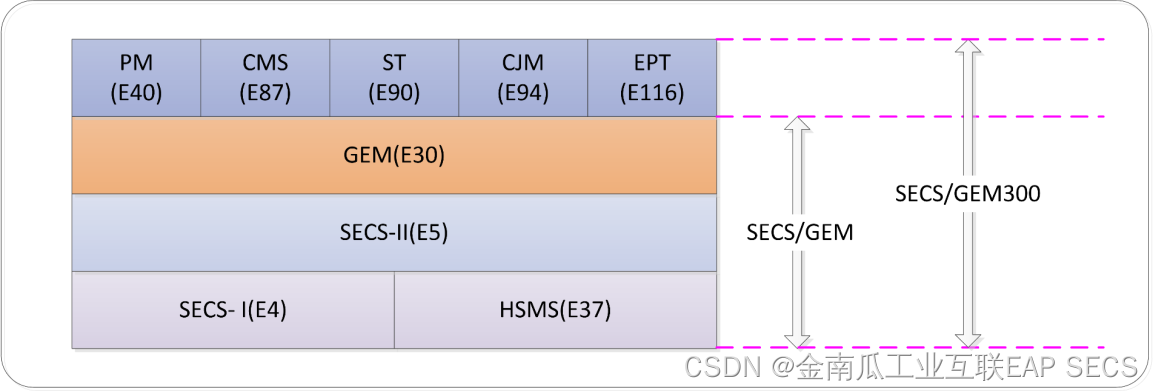
# 摘要
SECS-II标准作为半导体行业中设备通信的关键协议,对提升制造过程自动化和设备间通信效率起着至关重要的作用。本文首先概述了SECS-II标准及其历史背景,随后深入探讨了其通讯协议的理论基础,包括架构、组成、消息格式以及与GEM标准的关系。文章进一步分析了SECS-II在实践应用中的案例,涵盖设备通信实现、半导体生产应用以及软件开发与部署。同时,本文还讨论了SECS-II在现代半导体制造
深入探讨最小拍控制算法
# 摘要
最小拍控制算法是一种用于实现快速响应和高精度控制的算法,它在控制理论和系统建模中起着核心作用。本文首先概述了最小拍控制算法的基本概念、特点及应用场景,并深入探讨了控制理论的基础,包括系统稳定性的分析以及不同建模方法。接着,本文对最小拍控制算法的理论推导进行了详细阐述,包括其数学描述、稳定性分析以及计算方法。在实践应用方面,本文分析了最小拍控制在离散系统中的实现、
【Java内存优化大揭秘】:Eclipse内存分析工具MAT深度解读

# 摘要
本文深入探讨了Java内存模型及其优化技术,特别是通过Eclipse内存分析工具MAT的应用。文章首先概述了Java内存模型的基础知识,随后详细介绍MAT工具的核心功能、优势、安装和配置步骤。通过实战章节,本文展示了如何使用MAT进行堆转储文件分析、内存泄漏的检测和诊断以及解决方法。深度应用技巧章节深入讲解
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )