初识Arduino RTOS:入门指南
发布时间: 2024-02-21 10:09:47 阅读量: 88 订阅数: 16 
# 1. Arduino RTOS 简介
在本章中,我们将介绍Arduino RTOS的基本概念,并讨论为什么要使用Arduino RTOS以及它与传统Arduino库的区别。
## 什么是Arduino RTOS
Arduino RTOS是基于实时操作系统(RTOS)的Arduino库,它允许用户在Arduino平台上进行多任务处理和实时调度。RTOS的主要特点是能够对任务进行优先级调度和实时性管理,这使得Arduino可以处理更复杂的任务和更严格的时间限制。
## 为什么要使用Arduino RTOS
传统的Arduino库是基于单线程操作的,这意味着一次只能执行一个任务。当项目变得更加复杂时,使用RTOS可以更好地管理多个任务,提高系统的稳定性和可靠性。Arduino RTOS还提供了更高级的并发控制功能,能够更好地处理传感器数据、通信协议和用户接口。
## Arduino RTOS 与传统Arduino库的区别
与传统的Arduino库相比,Arduino RTOS具有更多的并发控制功能和任务管理特性。它允许用户创建多个任务并对它们进行优先级调度,以便更好地处理不同的任务和事件。另外,Arduino RTOS提供了信号量、队列和事件等高级特性,用于处理任务间的通信和同步。
在接下来的章节中,我们将深入讨论如何开始在Arduino平台上应用RTOS,并探索其各种功能和用法。
# 2. 准备工作
在开始使用Arduino RTOS之前,需要进行一些准备工作。本章将介绍如何设置开发环境以及准备所需的工具和库。
### 安装Arduino IDE
首先,您需要安装Arduino集成开发环境(IDE)。您可以从[Arduino官方网站](https://www.arduino.cc/en/Main/Software)下载适用于您的操作系统的IDE版本。安装完成后,打开IDE并准备开始使用Arduino RTOS。
### 安装相关的开发工具和库
为了使用Arduino RTOS,您还需要安装相应的开发工具和库。在Arduino IDE中,打开“工具”菜单,并选择“开发板”选项。在“开发板管理器”中搜索并安装适用于您的Arduino开发板的RT
OS支持库。
### 连接Arduino开发板并进行基本设置
将Arduino开发板通过USB线连接到计算机。在Arduino IDE中,选择正确的开发板和端口。您还可以创建一个新的Arduino RTOS项目或打开现有的项目。确保您的开发板与IDE成功连接,并且准备好开始使用Arduino RTOS。
在第二章中,我们详细介绍了如何准备工作以开始使用Arduino RTOS。接下来,我们将进入第三章,深入了解Arduino RTOS中的任务(Task)。
# 3. Task(任务)
在Arduino RTOS中,任务是指并行执行的基本单元。每个任务都有自己的代码和资源,并且可以独立地运行。任务的创建和管理是使用Arduino RTOS的一个重要方面。
#### 了解任务概念及其在Arduino RTOS中的作用
任务是Arduino RTOS中的核心概念,它允许我们以并行的方式执行多个任务。每个任务都有自己的代码和优先级,RTOS会根据任务的优先级进行调度。这种并行执行的方式使得我们可以更有效地利用Arduino板的资源,提高系统的响应能力。
#### 创建和管理任务
在Arduino RTOS中,我们可以使用`TaskHandle_t`数据类型来定义一个任务句柄,并使用`xTaskCreate()`函数来创建一个新的任务。下面是一个简单的示例:
```c
void taskFunction(void *parameter) {
// 任务执行的代码
}
void setup() {
// 初始化代码
xTaskCreate(taskFunction, "TaskName", 100, NULL, 1, NULL);
// 其他初始化
}
void loop() {
// 主循环代码
}
```
在上面的示例中,我们定义了一个名为`taskFunction`的任务函数,并使用`xTaskCreate()`函数来创建一个名为`TaskName`的任务,优先级为1。
#### 任务优先级和调度
在Arduino RTOS中,任务的优先级数字越小,优先级越高。任务的调度是RTOS根据任务的优先级来进行的,优先级高的任务会优先执行。我们可以使用`vTaskPrioritySet()`函数来设置任务的优先级,或使用`vTaskSuspend()`和`vTaskResume()`函数来挂起和恢复任务的执行。
通过合理设置任务的优先级和调度方式,我们可以更好地控制任务的执行顺序,提高系统的效率和性能。
# 4. Semaphore(信号量)
在Arduino RTOS中,信号量是一种用于同步和协调多个任务之间共享资源访问的机制。通过信号量,可以控制对共享资源的访问,避免出现竞争条件和数据不一致的问题。
#### 信号量的概念和原理
信号量是一个计数器,可以被用来控制对共享资源的访问。它通常用于解决多任务环境下的竞态条件(Race Condition)和死锁(Deadlock)等问题。信号量包括两种类型:二进制信号量和计数信号量。二进制信号量的取值范围是0和1,用于互斥访问共享资源;计数信号量的取值范围大于等于0,用于限制同时访问共享资源的任务数目。
#### 在Arduino RTOS中使用信号量
在Arduino RTOS中,可以通过Semaphore类来创建和管理信号量。首先需要定义一个Semaphore对象,然后使用其成员函数来实现对信号量的操作,包括获取(acquire)和释放(release)等。
```java
#include <Arduino_FreeRTOS.h>
SemaphoreHandle_t xSemaphore;
void setup() {
xSemaphore = xSemaphoreCreateBinary();
if (xSemaphore != NULL) {
// 创建信号量成功
}
}
void loop() {
if (xSemaphore != NULL) {
if (xSemaphoreTake(xSemaphore, portMAX_DELAY) == pdTRUE) {
// 获取信号量成功,执行对共享资源的访问操作
// ...
xSemaphoreGive(xSemaphore); // 释放信号量
}
}
}
```
#### 信号量的应用实例
一个常见的应用实例是在多任务环境下对共享资源进行访问控制。例如,一个传感器任务需要定期读取传感器数值并将数据存入共享的队列,而另一个任务则需要从队列中获取数据进行处理。这时就可以使用信号量来控制对队列的访问,确保一次只有一个任务在访问队列,避免数据冲突和丢失。
通过以上介绍,读者可以了解在Arduino RTOS中如何使用信号量来实现任务之间的协调和共享资源的访问控制。
# 5. Queue(队列)
在Arduino RTOS中,队列是一种常用的数据结构,用于在任务之间传递数据。队列可以帮助任务之间实现数据的有序交换,提高系统的效率和可靠性。
### 队列的概念和用途
队列是一种FIFO(先进先出)的数据结构,类似于实际生活中的排队现象。在Arduino RTOS中,队列通常用于在任务之间传递数据或消息。当一个任务生成数据,另一个任务需要使用这些数据时,可以通过队列将数据传递给另一个任务,实现任务之间的通信和数据交换。
### 如何在Arduino RTOS中实现队列
在Arduino RTOS中,可以使用RTOS队列库中提供的函数来创建和管理队列。首先需要定义一个队列变量,然后使用相应的函数对队列进行初始化、发送数据和接收数据操作。
```cpp
#include <Queue.h>
QueueHandle_t myQueue;
void setup() {
myQueue = xQueueCreate(5, sizeof(int)); // 创建一个最大容量为5的队列,每个元素的大小为int类型
}
void loop() {
int data = 123;
xQueueSend(myQueue, &data, portMAX_DELAY); // 将数据发送到队列中,portMAX_DELAY表示等待时间为永久
}
```
### 使用队列进行数据交换的例子
下面是一个使用队列在两个任务之间进行数据交换的例子,一个任务向队列发送数据,另一个任务从队列接收数据:
```cpp
#include <Queue.h>
QueueHandle_t myQueue;
void Task1(void *pvParameters) {
int data = 123;
xQueueSend(myQueue, &data, portMAX_DELAY);
vTaskDelay(1000 / portTICK_PERIOD_MS);
}
void Task2(void *pvParameters) {
int receivedData;
if(xQueueReceive(myQueue, &receivedData, portMAX_DELAY)){
Serial.println("Received data: " + String(receivedData));
}
vTaskDelay(1000 / portTICK_PERIOD_MS);
}
void setup() {
myQueue = xQueueCreate(5, sizeof(int));
xTaskCreate(Task1, "Task1", 100, NULL, 1, NULL);
xTaskCreate(Task2, "Task2", 100, NULL, 1, NULL);
}
void loop() {
// 无需在loop中添加任何代码
}
```
通过以上代码示例,我们可以看到如何在Arduino RTOS中使用队列进行数据交换。第一个任务向队列发送数据,第二个任务从队列接收数据并进行处理,实现了任务之间的数据交换和通信。
在项目中合理使用队列可以提高系统的整体效率和可靠性,避免数据丢失和混乱,是Arduino RTOS编程中很重要的一部分。
# 6. Event(事件)
在Arduino RTOS中,事件是一种重要的机制,用于实现任务间的通信和协作。通过事件,任务可以等待某种条件的发生,或者在特定条件满足时执行相应的操作。接下来,我们将详细介绍Arduino RTOS中事件的概念和实现机制。
#### 事件的概念和实现机制
事件是一种在多任务系统中用于任务同步和通信的机制。Arduino RTOS中的事件可以是信号的状态变化、特定时间的到来、或者其他任务产生的通知。通常情况下,一个任务会等待某个事件的发生,而另一个任务则会产生这个事件。事件的实现依赖于信号量、队列等机制,通过这些机制可以实现任务间的事件通知和等待。
#### Arduino RTOS中的事件监控
在Arduino RTOS中,可以使用事件标志组(Event Flags)来实现事件的监控和通知。任务可以通过等待某个或多个事件标志组的方式来阻塞自己,直到对应的事件发生。当某个任务产生了特定的事件时,可以通过设置相应的事件标志来通知等待的任务。
以下是一个简单的示例代码,演示了基于事件的任务同步:
```java
#include <Arduino_FreeRTOS.h>
// 定义事件标志组
EventGroupHandle_t eventGroup;
// 任务1:等待事件发生
void task1(void *pvParameters) {
const TickType_t xTicksToWait = pdMS_TO_TICKS(100);
EventBits_t bits;
for (;;) {
bits = xEventGroupWaitBits(eventGroup, BIT_0, pdTRUE, pdFALSE, xTicksToWait);
if ((bits & BIT_0) != 0) {
// 事件发生,执行相应操作
}
}
}
// 任务2:产生事件
void task2(void *pvParameters) {
for (;;) {
// 产生事件,设置事件标志
xEventGroupSetBits(eventGroup, BIT_0);
vTaskDelay(pdMS_TO_TICKS(200));
}
}
void setup() {
eventGroup = xEventGroupCreate();
xTaskCreate(task1, "Task1", 100, NULL, 1, NULL);
xTaskCreate(task2, "Task2", 100, NULL, 1, NULL);
}
void loop() {
// 程序主循环
}
```
在上述示例中,任务1通过调用`xEventGroupWaitBits`等待事件的发生,而任务2则通过调用`xEventGroupSetBits`来产生事件。通过事件标志组,两个任务实现了简单的同步和通信。
#### 事件驱动编程在Arduino RTOS中的应用
事件驱动编程是一种常见的编程范式,在Arduino RTOS中也可以通过事件来驱动任务的执行。通过合理地设计事件和任务之间的关系,可以使程序结构更加清晰和可维护,提高系统的响应速度和并发能力。
总结起来,事件是Arduino RTOS中实现任务同步和通信的重要机制,通过合理地使用事件可以实现任务的协作和并发执行。在实际项目中,合理地设计和使用事件将对系统的可靠性和性能产生重要影响。
希望通过本章的介绍,读者能够对Arduino RTOS中的事件有一个清晰的认识,并能够在实际项目中灵活应用。
 最低0.47元/天 解锁专栏
最低0.47元/天 解锁专栏 送3个月
 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏《Arduino RTOS开发》全面探讨了基于Arduino平台的实时操作系统开发。从基础知识解析开始,逐步深入探讨了Arduino RTOS中的内存管理与堆栈分析、中断处理与实时性能优化、资源管理与互斥锁应用等关键领域。同时,也覆盖了低功耗管理与优化策略、内核配置与编译优化、多任务协作与协同编程等内容。而在最后,还介绍了实时性能评估与测试方法,为读者提供了全面的实践指南。通过本专栏的学习,读者不仅能够全面了解Arduino RTOS的基本原理与核心技术,还能够掌握在实际应用中的开发与优化策略,从而更好地应用于自己的项目开发中。
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【实战演练】虚拟宠物:开发一个虚拟宠物游戏,重点在于状态管理和交互设计。
# 2.1 虚拟宠物的状态模型
### 2.1.1 宠物的基本属性
虚拟宠物的状态由一系列基本属性决定,这些属性描述了宠物的当前状态,包括:
- **生命值 (HP)**:宠物的健康状况,当 HP 为 0 时,宠物死亡。
- **饥饿值 (Hunger)**:宠物的饥饿程度,当 Hunger 为 0 时,宠物会饿死。
- **口渴
【实战演练】使用Docker与Kubernetes进行容器化管理
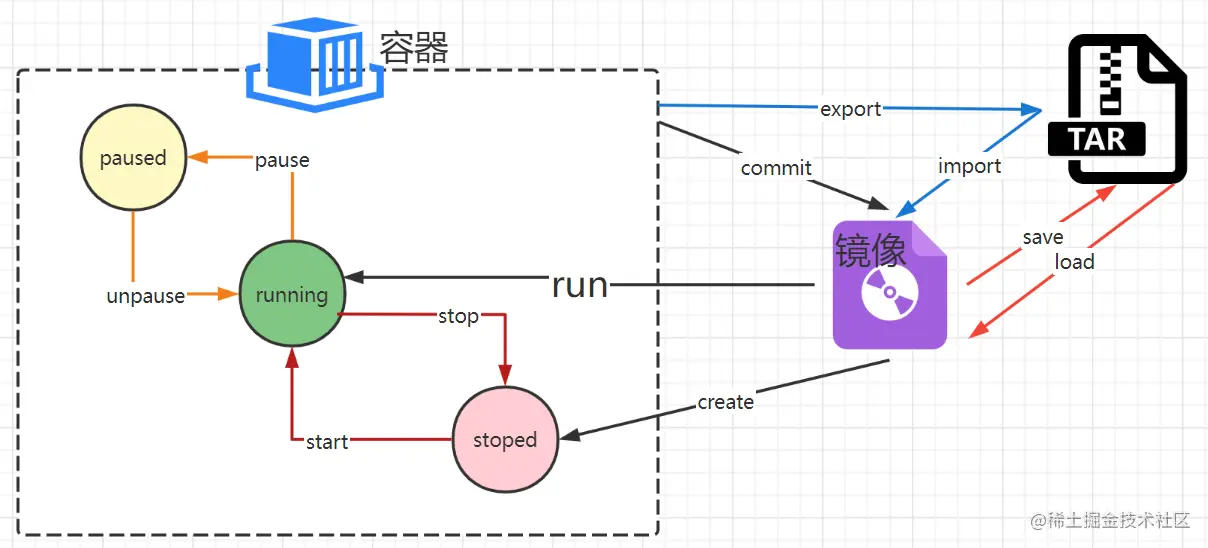
# 2.1 Docker容器的基本概念和架构
Docker容器是一种轻量级的虚拟化技术,它允许在隔离的环境中运行应用程序。与传统虚拟机不同,Docker容器共享主机内核,从而减少了资源开销并提高了性能。
Docker容器基于镜像构建。镜像是包含应用程序及
【实战演练】时间序列预测项目:天气预测-数据预处理、LSTM构建、模型训练与评估

# 1. 时间序列预测概述**
时间序列预测是指根据历史数据预测未来值。它广泛应用于金融、天气、交通等领域,具有重要的实际意义。时间序列数据通常具有时序性、趋势性和季节性等特点,对其进行预测需要考虑这些特性。
# 2. 数据预处理
### 2.1 数据收集和清洗
#### 2.1.1 数据源介绍
时间序列预测模型的构建需要可靠且高质量的数据作为基础。数据源的选择至关重要,它将影响模型的准确性和可靠性。常见的时序数据源包括:
【实战演练】构建简单的负载测试工具

# 1. 负载测试基础**
负载测试是一种性能测试,旨在模拟实际用户负载,评估系统在高并发下的表现。它通过向系统施加压力,识别瓶颈并验证系统是否能够满足预期性能需求。负载测试对于确保系统可靠性、可扩展性和用户满意度至关重要。
# 2. 构建负载测试工具
### 2.1 确定测试目标和指标
在构建负载测试工具之前,至关重要的是确定测试目标和指标。这将指导工具的设计和实现。以下是一些需要考虑的关键因素:
【实战演练】通过强化学习优化能源管理系统实战
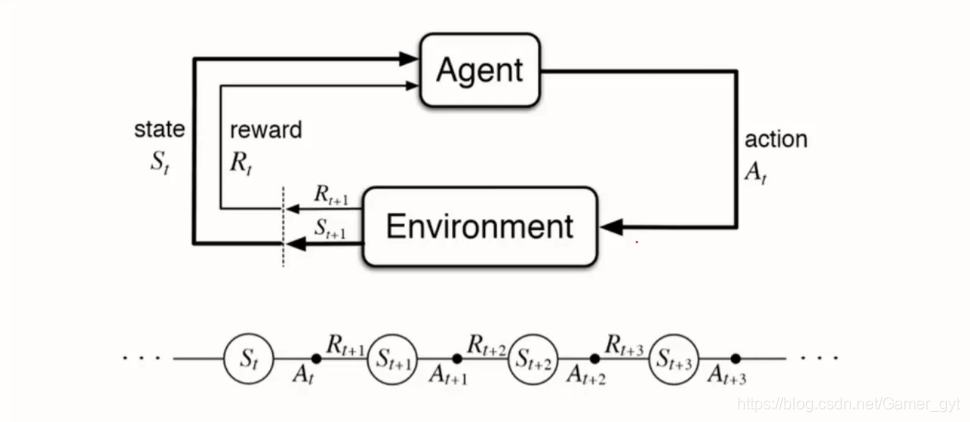
# 2.1 强化学习的基本原理
强化学习是一种机器学习方法,它允许智能体通过与环境的交互来学习最佳行为。在强化学习中,智能体通过执行动作与环境交互,并根据其行为的
【实战演练】前沿技术应用:AutoML实战与应用

# 1. AutoML概述与原理**
AutoML(Automated Machine Learning),即自动化机器学习,是一种通过自动化机器学习生命周期
【实战演练】综合案例:数据科学项目中的高等数学应用

# 1. 数据科学项目中的高等数学基础**
高等数学在数据科学中扮演着至关重要的角色,为数据分析、建模和优化提供了坚实的理论基础。本节将概述数据科学
【实战演练】网络安全静态分析技术基础

# 1. 网络安全静态分析技术概述
网络安全静态分析技术是一种通过对软件代码进行静态分析,识别潜在安全漏洞和恶意行为的主动防御技术。与动态分析技术不同,静态分析技术无需执行代码,而是直接对代码文本进行分析。
静态分析技术在网络安全领域具有广泛的应用,包括恶意软件检测、漏洞检测和网络入侵检测。通过分析代码结构、数据流和控制流,静态分析工具可以识别潜在的安全隐患,例如
【实战演练】python云数据库部署:从选择到实施
# 2.1 云数据库类型及优劣对比
**关系型数据库(RDBMS)**
* **优点:**
* 结构化数据存储,支持复杂查询和事务
* 广泛使用,成熟且稳定
* **缺点:**
* 扩展性受限,垂直扩展成本高
* 不适合处理非结构化或半结构化数据
**非关系型数据库(NoSQL)**
* **优点:**
* 可扩展性强,水平扩展成本低
【实战演练】深度学习在计算机视觉中的综合应用项目

# 1. 计算机视觉概述**
计算机视觉(CV)是人工智能(AI)的一个分支,它使计算机能够“看到”和理解图像和视频。CV 旨在赋予计算机人类视觉系统的能力,包括图像识别、对象检测、场景理解和视频分析。
CV 在广泛的应用中发挥着至关重要的作用,包括医疗诊断、自动驾驶、安防监控和工业自动化。它通过从视觉数据中提取有意义的信息,为计算机提供环境感知能力,从而实现这些应用。
# 2.1 卷积
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )