电动机单片机控制系统可靠性设计:确保系统稳定运行
发布时间: 2024-07-12 22:21:15 阅读量: 60 订阅数: 26 

carsim,simulink联合仿真,自动驾驶基于mpc自定义期望速度跟踪控制,可以在外部自定义期望速度传入sfunction函数,设置了两个不同状态方程,控制量为加速度,加速度变化量提供进行对比

# 1. 电动机单片机控制系统可靠性概述**
电动机单片机控制系统是工业自动化领域的关键组成部分,其可靠性对于确保系统稳定运行和生产效率至关重要。本节概述了电动机单片机控制系统可靠性的概念和重要性。
可靠性是指系统在规定条件下和规定时间内执行其预期功能的能力。对于电动机单片机控制系统,可靠性主要体现在系统稳定运行、响应及时、故障率低等方面。高可靠性的系统可以减少停机时间、提高生产效率,并降低维护成本。
# 2.1 可靠性概念和度量指标
### 2.1.1 可靠性定义和分类
**定义:**
可靠性是指系统在指定条件下和指定时间内执行其指定功能的能力。
**分类:**
* **固有可靠性:**系统在理想条件下固有的可靠性,不考虑外部因素。
* **操作可靠性:**系统在实际操作条件下的可靠性,包括外部因素的影响。
* **维护可靠性:**系统在维护和修理后的可靠性。
### 2.1.2 可靠性度量指标
**失效率:**
单位时间内系统失效的概率,常用 λ 表示。
**平均无故障时间 (MTTF):**
系统在失效前平均运行的时间,等于 1/λ。
**平均修复时间 (MTTR):**
系统失效后平均修复的时间。
**可用性:**
系统在指定时间内处于可用状态的概率,等于 MTTF/(MTTF + MTTR)。
**其他指标:**
* **故障率:**单位时间内系统发生故障的概率。
* **故障强度:**随着时间推移,系统故障率的变化率。
* **故障间隔时间:**两次故障之间的平均时间。
**代码块:**
```python
import numpy as np
# 计算失效率
def failure_rate(mttf):
return 1 / mttf
# 计算平均无故障时间
def mean_time_to_failure(failure_rate):
return 1 / failure_rate
# 计算平均修复时间
def mean_time_to_repair(mttr):
return mttr
# 计算可用性
def availability(mttf, mttr):
return mttf / (mttf + mttr)
```
**逻辑分析:**
该代码块提供了计算失效率、平均无故障时间、平均修复时间和可用性的函数。这些指标对于评估系统的可靠性至关重要。
**参数说明:**
* `mttf`: 平均无故障时间
* `failure_rate`: 失效率
* `mttr`: 平均修复时间
# 3. 电动机单片机控制系统可靠性设计实践
### 3.1 硬件可靠性设计
#### 3.1.1 元器件选择和布局
元器件选择是硬件可靠性设计的基础。选择高可靠性的元器件可以有效提高系统的整体可靠性。在选择元器件时,需要考虑以下因素:
- **额定值和裕量:**元器件的额定值应满足系统要求,并留有足够的裕量。
- **可靠性数据:**查阅元器件的可靠性数据,包括失效率、平均无故障时间等指标。
- **供应商资质:**选择信誉良好的供应商,确保元器件的质量和可靠性。
元器件布局对于可靠性也有影响。良好的布局可以减少干扰、散热和应力。布局时应注意以下原则:
- **隔离敏感元器件:**将敏感元器件(如微控制器)与干扰源(如电机驱动器

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏以“电动机的单片机控制”为主题,深入探讨了电动机控制领域的各个方面。从入门到精通,专栏提供了全面的系统设计和实现指南。它揭示了电动机单片机控制背后的原理,并提供了优化算法以提升性能和效率。此外,专栏还涵盖了系统设计、调试、故障排除、安全设计、性能评估、应用案例、技术前沿、系统集成、维护、故障诊断、安全认证、成本优化、节能设计、可靠性设计、可维护性设计和用户体验设计等内容。通过深入浅出的讲解和丰富的案例,本专栏旨在帮助读者掌握电动机单片机控制的精髓,并将其应用于实际项目中。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【VNX5600 SAN架构】:权威解析与设计最佳实践
# 摘要
VNX5600 SAN架构是企业级存储解决方案的核心,提供高效的数据存储和管理能力。本文全面介绍VNX5600的硬件组件、存储理论基础、配置管理以及企业应用实践。通过对VNX5600硬件概览、数据存储理论基础和存储池与文件系统的分析,本文详细阐述了如何构建和管理SAN环境,以实现存储资源的有效分配和优化。同时,文章探讨了VNX5600在企业中的应用,包括与虚拟化平台的
提高机械臂效率的秘诀:轨迹规划算法全解析(效率提升指南)

# 摘要
随着自动化和智能制造的快速发展,机械臂效率的提升已成为重要研究课题。本文首先概述了机械臂效率的现状与面临的挑战,接着详细介绍了轨迹规划算法的基本理论,包括机械臂运动学基础和轨迹规划的定义、分类及优化目标。在实践应用方面,文章探讨了连续路径和点到点轨迹规划的实例应用,强调了工作环境影响与实时调整策略的重要性。进一步地,本文分析了高
CUDA内存管理深度解析:防内存泄漏,提升数据传输效率的策略
# 摘要
本文全面探讨了CUDA内存管理的关键技术和实践策略。首先概述了CUDA内存管理的基本概念,详细介绍了CUDA不同内存类型及其分配策略,包括全局内存、共享内存、常量内存和纹理内存。接着,文章聚焦于内存泄漏的检测与防范,阐述了内存泄漏的常见原因和后果,介绍了使用CUDA开发工具进行内存分析的技巧。此外,还深入探
BCM89811在高性能计算中的高级应用:行业专家透露最新使用技巧!

# 摘要
本文全面介绍BCM89811芯片的技术细节和市场定位。首先,本文阐述了BCM89811的基本架构和性能特性,重点讨论了其核心组件、性能参数、高级性能特性如高速缓存、内存管理、能耗优化以及硬件加速能力,并通过行业应用案例展示其在数据中心和高性能计算集群中的实际应用。其次,文中详细介绍了BCM89811的软件开发环境配置、编程接口与
UFF与常见数据格式对比分析:深入了解各领域应用案例与标准化过程

# 摘要
统一文件格式(UFF)作为一种新兴的数据标准,正逐渐改变着多个行业内的数据交换方式。本文首先概述了UFF与数据格式的基本概念,随后深入探讨了UFF的技术背景、标准化过程、结构组成,及其在工业自动化、汽车行业和医疗设备等领域的应用案例。通过对UFF与其他数据格式如CSV、XML和JSO
【逆变器控制策略优化秘诀】:利用SIMULINK提升逆变器性能

# 摘要
逆变器作为电能转换的关键设备
M-PHY链路层精研:揭秘时钟同步与低功耗设计的革命性应用(专家级深入分析)
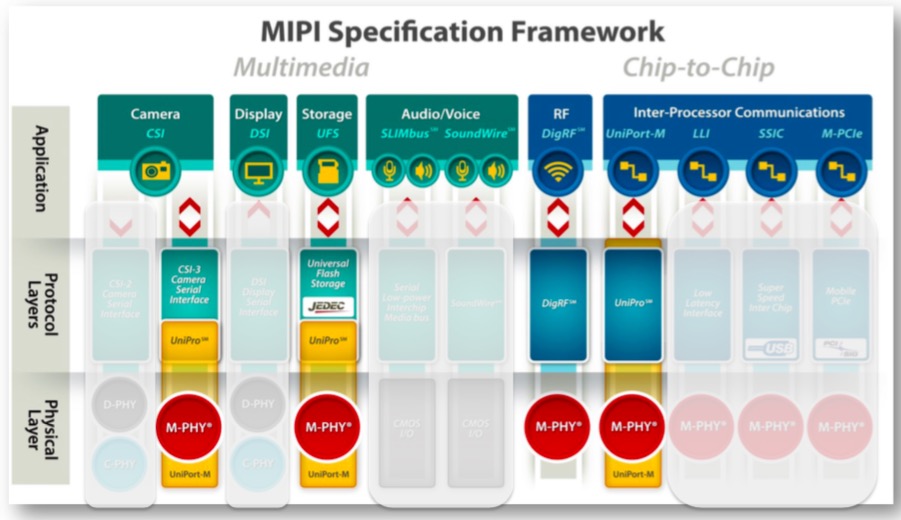
# 摘要
M-PHY作为先进的物理层通信技术,其链路层的设计在满足高速通信需求的同时,还需解决时钟同步、低功耗以及测试与调试等技术挑战。本文首先概述了M-PHY链路层的基本框架,随后深入探讨了其时钟
【系统日志解读教程】:破解Windows 2008 R2 64位系统驱动失败之谜
# 摘要
本论文旨在系统阐述系统日志解读的重要性和基础,特别是针对Windows 2008 R2系统驱动的失败问题进行深入分析。通过对驱动失败原因的探讨,包括硬件兼容性、软件冲突、系统资源分配等问题,本文揭示了驱动失败的常见表现,并提供了详尽的系统日志分析实战技巧。论文不仅涵盖了
【NVIDIA H100内存优化】:深入探索内存层次结构以提升数据处理速度
# 摘要
本文重点介绍了NVIDIA H100 GPU架构及其内存层次结构的基础知识,探讨了内存带宽和延迟分析,并提供了内存管理的最佳实践。通过案例分析,本文展示了深度学习中内存优化的具体应用,并深入讨论了利用共享内存、缓存优化技巧以及优化内存访问模式的技术。最后,文章展望了未来内存优化技术的发展趋势,强调了新型内存层次结构和软硬件协同优化的重要性,为相关领域的研究与实践提供了指导。
#
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )