单片机程序设计实战:电机控制,让你的项目动起来
发布时间: 2024-07-06 12:07:34 阅读量: 46 订阅数: 29 

无需编写任何代码即可创建应用程序:Deepseek-R1 和 RooCode AI 编码代理.pdf
# 1. 单片机程序设计基础
单片机是一种集成了CPU、存储器、输入/输出接口和定时器等功能的微型计算机,广泛应用于各种电子设备中。单片机程序设计是实现单片机功能的关键。
### 1.1 单片机硬件架构
单片机通常采用哈佛架构,即程序存储器和数据存储器是分开的。程序存储器存储程序指令,而数据存储器存储数据和变量。单片机还具有各种输入/输出接口,如GPIO、UART、SPI和I2C,用于与外部设备进行通信。
### 1.2 单片机编程语言
单片机编程语言主要有汇编语言和C语言。汇编语言是一种低级语言,直接操作单片机的寄存器和指令,具有执行效率高、代码紧凑的特点。C语言是一种高级语言,语法简洁,易于理解,适合编写复杂程序。
# 2. 电机控制原理与驱动
### 2.1 电机的工作原理
#### 2.1.1 直流电机
直流电机是一种通过电磁作用将电能转换为机械能的电机。其工作原理是:当电流流过绕在定子上的线圈时,线圈会产生磁场。这个磁场与转子上的永磁体相互作用,产生力矩,从而使转子旋转。
直流电机的转速与施加的电压成正比,与磁场强度成正比,与转子上的摩擦阻力成反比。
#### 2.1.2 步进电机
步进电机是一种将电脉冲转换为机械角位移的电机。其工作原理是:当电流流过定子上的线圈时,线圈会产生磁场。这个磁场与转子上的齿轮相互作用,产生力矩,从而使转子按步进的方式旋转。
步进电机的转速与施加的脉冲频率成正比,与转子的惯量成反比。
### 2.2 电机驱动器
电机驱动器是用于控制电机转速、方向和扭矩的电子电路。
#### 2.2.1 H桥驱动器
H桥驱动器是一种用于控制直流电机的双向驱动器。其工作原理是:通过控制四个开关的通断状态,可以改变流过电机的电流方向,从而实现电机的正转、反转和制动。
```
// H桥驱动器代码块
// 定义引脚
int motorPin1 = 2;
int motorPin2 = 3;
int motorPin3 = 4;
int motorPin4 = 5;
// 设置引脚模式
pinMode(motorPin1, OUTPUT);
pinMode(motorPin2, OUTPUT);
pinMode(motorPin3, OUTPUT);
pinMode(motorPin4, OUTPUT);
// 正转
void forward() {
digitalWrite(motorPin1, HIGH);
digitalWrite(motorPin2, LOW);
digitalWrite(motorPin3, HIGH);
digitalWrite(motorPin4, LOW);
}
// 反转
void reverse() {
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, HIGH);
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin4, HIGH);
}
// 制动
void brake() {
digitalWrite(motorPin1, HIGH);
digitalWrite(motorPin2, HIGH);
digitalWrite(motorPin3, HIGH);
digitalWrite(motorPin4, HIGH);
}
```
**逻辑分析:**
* `forward()` 函数通过设置引脚状态,使电流从正极流向电机,从而实现正转。
* `reverse()` 函数通过设置引脚状态,使电流从负极流向电机,从而实现反转。
* `brake()` 函数通过设置引脚状态,使电机两端短路,从而实现制动。
#### 2.2.2 PWM驱动器
PWM驱动器是一种用于控制电机转速的驱动器。其工作原理是:通过改变施加到电机的电压的占空比,可以改变流过电机的平均电流,从而实现电机的调速。
```
// PWM驱动器代码块
// 定义引脚
int motorPin = 9;
// 设置引脚模式
pinMode(motorPin, OUTPUT);
// 设置 PWM 频率和占空比
int pwmFrequency = 1000; // Hz
int pwmDutyCycle = 50; // %
// 创建 PWM 输出
analogWrite(motorPin, pwmDutyCycle);
```
**逻辑分析:**
* `analogWrite()` 函数接受两个参数:引脚号和占空比。
* 占空比表示 PWM 信号中高电平的时间占整个周期时间的百分比。
* 通过改变占空比,可以改变流过电机的平均电流,从而实现电机的调速。
# 3. 单片机电机控制实践
### 3.1 单片机电机控制系统设计
#### 3.1.1 系统硬件架构
单片机电机控制系统硬件架构一般包括以下几个部分:
- **单片机:**负责控制整个系统的运行,接收传感器信号,输出控制信号。
- **电机驱动器:**负责放大单片机输出的控制信号,驱动电机。
- **电机:**将电能转换成机械能,产生转矩。
- **传感器:**检测电机的转速、位置、电流等信息,反馈给单片机。
#### 3.1.2 软件设计流程
单片机电机控制软件设计流程一般包括以下几个步骤:
1. **需求分析:**确定电机控制系统的功能和性能要求。
2. **硬件设计:**根据需求分析,设计系统硬件架构,选择合适的单片机、电机驱动器、电机和传感器。
3. **软件开发:**编写单片机控制程序,实现电机控制算法和系统功能。
4. **调试:**通过仿真或实机调试,验证软件的正确性和系统性能。
5. **优化:**根据调试结果,优化软件和硬件设计,提高系统性能和可靠性。
### 3.2 电机控制算法
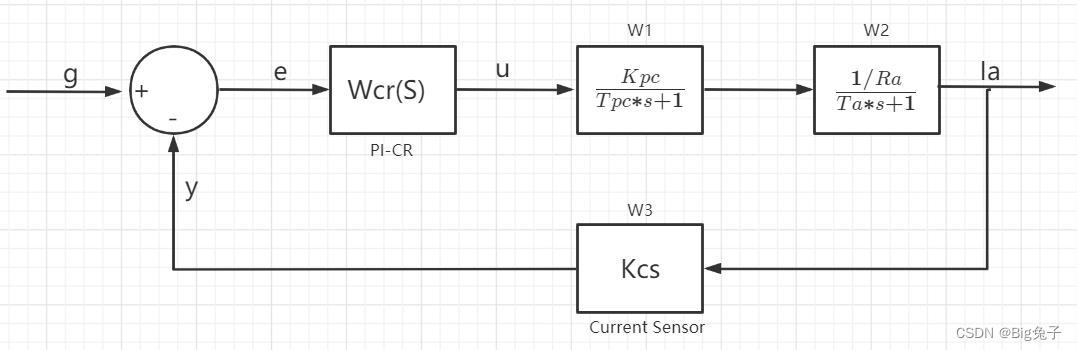
#### 3.2.1 PID控制
PID控制(比例-积分-微分控制)是一种经典的电机控制算法,通过调整比例、积分和微分系数,可以实现对电机转速、位置和电流的精确控制。
**PID控制算法公式:**
```
u(t) = Kp * e(t) + Ki * ∫e(t)dt + Kd * de(t)/dt
```
其中:
- `u(t)`:控制输出
- `e(t)`:误差信号(目标值与实际值之差)
- `Kp`:比例系数
- `Ki`:积分系数
- `Kd`:微分系数
**PID控制算法参数说明:**
| 参数 | 作用 |
|---|---|
| `Kp` | 调节误差信号的幅度 |
| `Ki` | 消除误差信号的累积 |
| `Kd` | 预测误差信号的变化趋势 |
#### 3.2.2 模糊控制
模糊控制是一种基于模糊逻辑的控制算法,通过定义模糊规则库,可以实现对电机控制的非线性、不确定性问题的处理。
**模糊控制算法流程图:**
[流程图](https://mermaid.ink/svg/eyJjb2RlIjoiZ3JhcGggTFVOR1lERU5DWSB7CiAgICAgICAgICAgICAgICAgICAgICAgICAgICAgICAgICAgICAgICAgICAgICAgICAgICAgICAgICAgICAgICAgICAgICAgICAgICAgICAgICAgICAgICAgICAgICAgICAgICAgICAgICAgICAgICAgICAgICAgICAgICAgICAgICAgICA

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《单片机程序设计》专栏深入浅出地介绍了单片机程序设计的各个方面,涵盖了基础知识、数据类型和变量、控制结构、中断处理、定时器和计数器,以及实战应用。专栏从架构、指令集和编程环境的解析开始,逐步深入到数据存储和操作、程序流程控制、事件响应和时间控制等核心概念。通过一系列实战案例,如LED灯控制、按键扫描和数码管显示,读者可以掌握单片机程序设计的实用技能,为后续的项目开发奠定坚实的基础。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【Windows系统性能升级】:一步到位的WinSXS清理操作手册
# 摘要
本文针对Windows系统性能升级提供了全面的分析与指导。首先概述了WinSXS技术的定义、作用及在系统中的重要性。其次,深入探讨了WinSXS的结构、组件及其对系统性能的影响,特别是在系统更新过程中WinSXS膨胀的挑战。在此基础上,本文详细介绍了WinSXS清理前的准备、实际清理过程中的方法、步骤及
Lego性能优化策略:提升接口测试速度与稳定性
# 摘要
随着软件系统复杂性的增加,Lego性能优化变得越来越重要。本文旨在探讨性能优化的必要性和基础概念,通过接口测试流程和性能瓶颈分析,识别和解决性能问题。文中提出多种提升接口测试速度和稳定性的策略,包括代码优化、测试环境调整、并发测试策略、测试数据管理、错误处理机制以及持续集成和部署(CI/CD)的实践。此外,本文介绍了性能优化工具和框架的选择与应用,并
UL1310中文版:掌握电源设计流程,实现从概念到成品

# 摘要
本文系统地探讨了电源设计的全过程,涵盖了基础知识、理论计算方法、设计流程、实践技巧、案例分析以及测试与优化等多个方面。文章首先介绍了电源设计的重要性、步骤和关键参数,然后深入讲解了直流变换原理、元件选型以及热设计等理论基础和计算方法。随后,文章详细阐述了电源设计的每一个阶段,包括需求分析、方案选择、详细设计、仿真
Redmine升级失败怎么办?10分钟内安全回滚的完整策略
# 摘要
本文针对Redmine升级失败的问题进行了深入分析,并详细介绍了安全回滚的准备工作、流程和最佳实践。首先,我们探讨了升级失败的潜在原因,并强调了回滚前准备工作的必要性,包括检查备份状态和设定环境。接着,文章详解了回滚流程,包括策略选择、数据库操作和系统配置调整。在回滚完成后,文章指导进行系统检查和优化,并分析失败原因以便预防未来的升级问题。最后,本文提出了基于案例的学习和未来升级策
频谱分析:常见问题解决大全

# 摘要
频谱分析作为一种核心技术,对现代电子通信、信号处理等领域至关重要。本文系统地介绍了频谱分析的基础知识、理论、实践操作以及常见问题和优化策略。首先,文章阐述了频谱分析的基本概念、数学模型以及频谱分析仪的使用和校准问题。接着,重点讨论了频谱分析的关键技术,包括傅里叶变换、窗函数选择和抽样定理。文章第三章提供了一系列频谱分析实践操作指南,包括噪声和谐波信号分析、无线信号频谱分析方法及实验室实践。第四章探讨了频谱分析中的常见问题和解决
SECS-II在半导体制造中的核心角色:现代工艺的通讯支柱
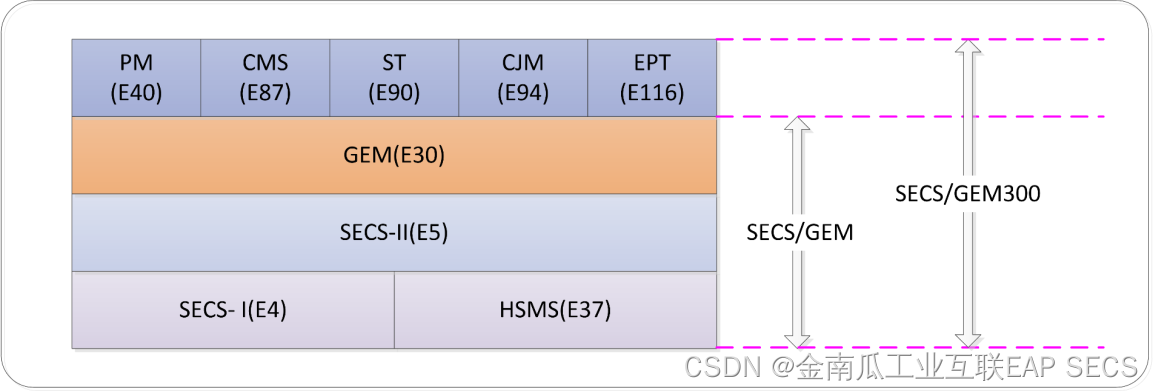
# 摘要
SECS-II标准作为半导体行业中设备通信的关键协议,对提升制造过程自动化和设备间通信效率起着至关重要的作用。本文首先概述了SECS-II标准及其历史背景,随后深入探讨了其通讯协议的理论基础,包括架构、组成、消息格式以及与GEM标准的关系。文章进一步分析了SECS-II在实践应用中的案例,涵盖设备通信实现、半导体生产应用以及软件开发与部署。同时,本文还讨论了SECS-II在现代半导体制造
深入探讨最小拍控制算法
# 摘要
最小拍控制算法是一种用于实现快速响应和高精度控制的算法,它在控制理论和系统建模中起着核心作用。本文首先概述了最小拍控制算法的基本概念、特点及应用场景,并深入探讨了控制理论的基础,包括系统稳定性的分析以及不同建模方法。接着,本文对最小拍控制算法的理论推导进行了详细阐述,包括其数学描述、稳定性分析以及计算方法。在实践应用方面,本文分析了最小拍控制在离散系统中的实现、
【Java内存优化大揭秘】:Eclipse内存分析工具MAT深度解读

# 摘要
本文深入探讨了Java内存模型及其优化技术,特别是通过Eclipse内存分析工具MAT的应用。文章首先概述了Java内存模型的基础知识,随后详细介绍MAT工具的核心功能、优势、安装和配置步骤。通过实战章节,本文展示了如何使用MAT进行堆转储文件分析、内存泄漏的检测和诊断以及解决方法。深度应用技巧章节深入讲解
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )