【多线程编程技巧】:STM32与LMP90100集成的高效开发方法
发布时间: 2024-12-18 14:57:00 订阅数: 5 

STM32+LMP90100源码

# 摘要
本文旨在深入探讨STM32多线程编程的核心机制及其在工业传感器应用中的实践。文章首先介绍了STM32多线程编程的基础,包括实时操作系统(RTOS)的原理和多线程编程接口的使用。接着,文章详细描述了LMP90100数字模拟转换器与STM32的集成方案,包括硬件连接、驱动开发及多线程应用的实现。此外,本文也着重于多线程性能优化与故障排除的方法,探讨了性能分析工具、常见问题的解决方案以及故障排除的实际案例。最后,文章探讨了高级线程同步技术,复杂应用场景中的多线程应用以及STM32与LMP90100的未来发展方向,特别是多核处理器的支持和物联网领域的多线程编程趋势。
# 关键字
STM32;多线程编程;RTOS;LMP90100;性能优化;故障排除
参考资源链接:[STM32F103ZE与LMP90100交互源码实现](https://wenku.csdn.net/doc/233qz43y55?spm=1055.2635.3001.10343)
# 1. 多线程编程基础与STM32概述
## 1.1 多线程编程简介
多线程编程是现代软件开发的一个关键概念,它允许同时执行多个任务,以提高应用程序的响应性和效率。在多线程环境中,每个执行路径称为线程,它们共享同一进程的资源,但拥有自己的调用栈。这种模式特别适用于I/O操作密集型和多处理器计算任务。
## 1.2 STM32微控制器介绍
STM32是STMicroelectronics生产的ARM Cortex-M系列微控制器,广泛应用于嵌入式系统。它以其高性能、低功耗、丰富的外设和良好的实时性能而受到青睐。STM32具有多样的型号,提供不同的性能和功能组合,适合各种复杂度的应用需求。
## 1.3 STM32在多线程环境中的作用
在多线程应用中,STM32作为硬件平台,承担着管理线程执行和协调资源分配的重要角色。通过搭载实时操作系统(RTOS),STM32能够实现更加精细的任务调度,线程同步和通信,这对于实时性和可靠性要求极高的嵌入式系统至关重要。
# 2. STM32的多线程核心机制
## 2.1 STM32的实时操作系统(RTOS)基础
### 2.1.1 RTOS的任务调度和上下文切换
实时操作系统(RTOS)是用于管理多任务执行的软件框架,它为STM32这样的微控制器提供了任务管理的基础。RTOS通过任务调度器来管理所有任务,决定哪个任务可以运行以及何时运行。任务调度器的效率直接影响到整个系统的性能。
任务调度分为抢占式和协作式两种。抢占式调度中,高优先级任务可以抢占正在运行的低优先级任务的CPU资源,这有利于满足实时性的需求。协作式调度中,正在运行的任务必须主动放弃CPU资源,这简化了任务调度器的设计,但可能导致实时性不佳。
上下文切换是指操作系统停止一个任务的执行,并保存执行状态,以便稍后可以从该状态恢复执行。上下文切换的效率对多任务执行的流畅性至关重要。良好的上下文切换通常需要保存和恢复CPU寄存器状态,包括通用寄存器、程序计数器、状态寄存器等。
```c
// 任务切换示例代码
// 假设使用某种实时操作系统API进行任务切换
void task_switch() {
// 获取当前任务的上下文信息
save_current_task_context();
// 选择下一个要执行的任务
task_t *next_task = scheduler_find_next_task();
// 恢复下一个任务的上下文信息
restore_task_context(next_task);
}
```
### 2.1.2 RTOS中的线程同步和通信
线程同步是指控制多个线程对共享资源访问的过程,防止多个线程在同一时间内对同一资源进行操作而引发冲突。同步机制包括互斥锁(mutexes)、信号量(semaphores)、事件标志(event flags)等。
互斥锁是一种简单的同步机制,用于保证同一时间只有一个线程可以访问共享资源。当线程尝试获取已被锁定的互斥锁时,它将被阻塞直到锁被释放。
信号量是一种更为通用的同步工具,可以用来管理一组资源,线程通过信号量的等待和信号操作来同步。事件标志可用于指示事件的发生,线程可以通过检查事件标志位来执行相应的动作。
```c
// 信号量使用示例代码
semaphore_t sem;
void task_producer() {
// 生产数据
// ...
// 释放信号量,表示数据已准备好
semaphore_release(&sem);
}
void task_consumer() {
// 等待信号量
semaphore_wait(&sem);
// 消费数据
// ...
}
```
## 2.2 STM32的多线程编程接口
### 2.2.1 使用CMSIS-RTOS API进行线程管理
CMSIS-RTOS是一种支持多种实时操作系统(RTOS)的软件接口,允许开发者使用统一的API来管理STM32的任务。通过CMSIS-RTOS API,开发者可以创建、启动、挂起、恢复和删除任务。
任务的创建通常需要指定任务的入口函数、任务堆栈大小、任务优先级等参数。任务的堆栈大小取决于任务的复杂度,优先级则反映了任务的执行顺序。
```c
// 使用CMSIS-RTOS创建任务示例
void thread_function(void const *argument) {
// 任务体
}
int main(void) {
// 初始化硬件资源
// ...
osThreadId thread_id;
osThreadAttr_t thread_attr;
// 初始化任务属性
osThreadAttr_init(&thread_attr);
thread_attr.name = "myThread";
thread_attr.stack_size = 128;
// 创建任务
thread_id = osThreadNew(thread_function, NULL, &thread_attr);
// 启动任务
osThreadStart(thread_id, NULL);
// 启动调度器
osKernelStart();
// 永不返回
while (1) {
}
}
```
### 2.2.2 线程优先级和任务堆栈管理
优先级管理是多线程编程中的关键概念。合理分配任务的优先级能够帮助系统有效响应外部事件,并保证关键任务能够抢占CPU资源。在STM32中,任务优先级通常是一个整数值,数值越小表示优先级越高。
任务堆栈是每个任务运行时使用的内存区域,用于存储函数调用、局部变量等。堆栈管理不当可能会引起栈溢出、内存泄漏等问题。STM32的任务堆栈必须足够大,以避免溢出,并根据任务需要进行动态或静态分配。
```c
// CMSIS-RTOS线程优先级设置示例
void task_function(void const *argument) {
// 任务体
}
int main(void) {
osThreadId_t thread_id;
osThreadAttr_t thread_attr;
// 初始化任务属性
osThreadAttr_init(&thread_attr);
thread_attr.name = "myTask";
thread_attr.stack_size = 128;
thread_attr.priority = 1; // 高优先级
// 创建任务
thread_id = osThreadNew(task_function, NULL, &thread_attr);
// 启动任务
osThreadStart(thread_id, NULL);
// 启动调度器
osKernelStart();
}
```
## 2.3 STM32多线程的内存管理
### 2.3.1 动态内存分配策略
动态内存分配允许任务在运行时根据需要获取或释放内存。STM32的动态内存分配一般通过操作系统的内存管理器进行,它能够有效管理内存碎片问题。常用的动态内存分配策略有首次适配、最佳适配和最差适配。
首次适配算法会分配第一个足够大的空闲内存块。最佳适配算法会尝试找到最小的

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【实验参数设定指南】:在Design-Expert中精确定义响应变量与因素

# 摘要
本论文全面介绍Design-Expert软件及其在实验设计中的应用。第一章为软件介绍与概览,提供对软件功能和操作界面的初步了解。随后,第二章详细阐述实验设计的基础知识,包括响应变量与实验因素的理论、实验设计的类型与统计原理。第三章和第四章着重于在Design-Expert中如何定义响应变量和设定实验因素,包括变量类型、优化目标及数据管
【USB供电机制详解】:掌握电源与地线针脚的关键细节
# 摘要
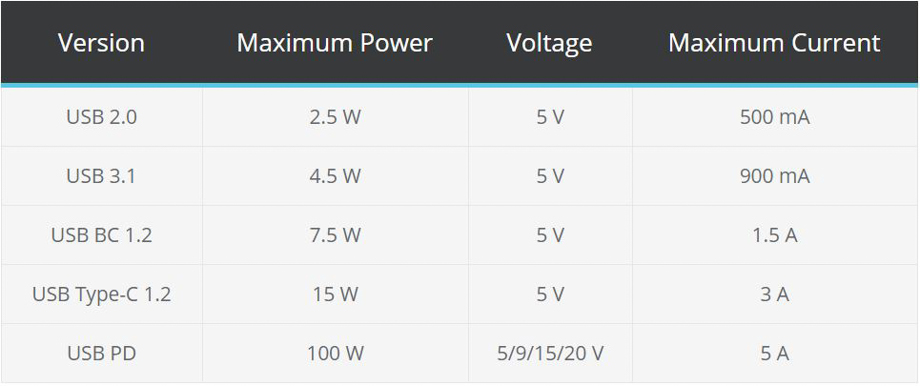
本文系统介绍了USB供电机制的理论基础与设计实践,深入探讨了USB电源针脚及地线针脚的电气特性,并分析了供电与地线在移动设备、PC及其周边设备中的应用。文中详细阐述了USB标准的演变、电源针脚的工作原理、供电电路设计、地线的连接与布局,以及热设计功率和电流限制等关键因素。此外,本文还探讨了USB供电
FANUC数控机床参数调整:避免误区的正确操作流程
# 摘要
FANUC数控机床参数调整是确保机床高效、精确运行的重要手段。本文首先概述了FANUC数控机床参数调整的基本概念和重要性。接着,详细解析了参数的类型、结构、分类及作用域,为深入理解参数调整奠定了基础。第三章探讨了参数调整的理论依据、原则和方法,并指出实践中的常见误区及其成因。第四章则重点介绍具体的参数调整操作流程和进阶技巧,以及在此过程中可能遇到的故障诊断与解决策略。通过对成功与失败案例的分析,本文第五章展示了参数调整的实际效果及重要性。最后,第六章展望了参数调整技术的未来发展和行业应用趋势,强调了技术创新与标准化在提升行业参数调整水平方面的作用。
# 关键字
数控机床;参数调整;
hw-server性能优化:服务器运行效率提升10倍的技巧
# 摘要
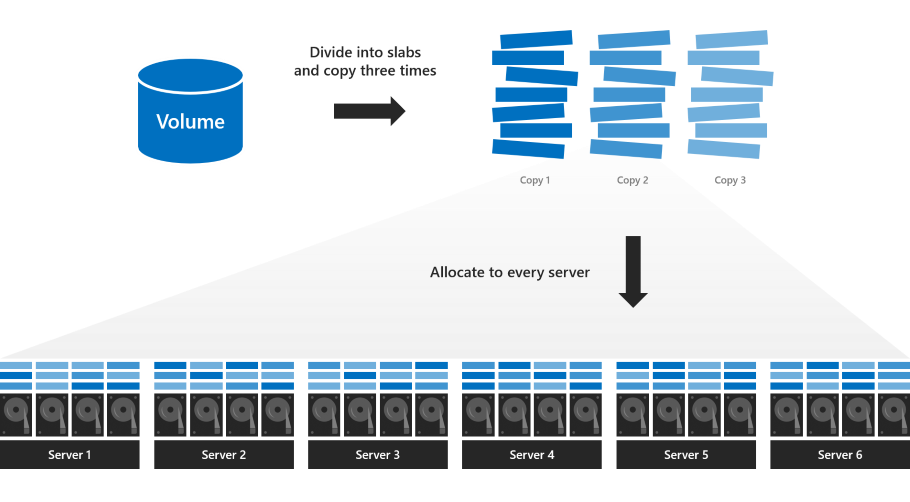
随着信息技术的迅猛发展,服务器性能优化成为提升计算效率和用户体验的关键。本文首先概述了服务器性能优化的重要性和基本概念。随后,文章深入探讨了影响服务器性能的关键指标,如响应时间、吞吐量以及CPU、内存和磁盘I/O的性能指标。在此基础上,本文详细介绍了性能瓶颈的诊断技
SMC真空负压表选型专家指南:不同场景下的精准选择

# 摘要
本文系统地介绍了SMC真空负压表的选型基础知识、技术参数解析以及在不同行业中的应用案例。文章首先阐述了SMC真空负压表的基本测量原理和主要技术指标,并指出选型时的常见误区。通过分析半导体制造、化工行业以及真空包装行业的应用实例,展示了真空负压表在实际应用中的选型策略和技巧。最后,文章详细介绍了真空负压表的维护与故障排除方法,强调了日常维护的重要性,以及通过预防性维护和操作人员培训提升设备使用寿命的必要性。本文为技术人
BELLHOP性能优化实战:5大技巧让你的应用性能飞跃

# 摘要
BELLHOP性能优化是一门涵盖基础理论与实战技巧的综合领域,旨在通过科学的方法和工具提升软件系统的运行效率。本文首先概述了BELLHOP性能优化的基础知识,随后详细探讨了性能分析的理论框架及高效工具的应用。在实战技巧方面,文章从代码优化、系统配置以及数据存储访问三个方面提供了深入的优化策略。此外,还介绍了负载均衡与扩展技术,以及在微服务架构下如何进行性能优化。高级技
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )