LinuxCNC与EtherCAT高级应用:复杂控制任务的实现技巧
发布时间: 2025-01-05 02:57:15 阅读量: 20 订阅数: 19 

基于苍鹰优化算法的NGO支持向量机SVM参数c和g优化拟合预测建模(Matlab实现),苍鹰优化算法NGO优化支持向量机SVM的c和g参数做多输入单输出的拟合预测建模 程序内注释详细直接替数据就可以
# 摘要
本文介绍了LinuxCNC与EtherCAT技术在工业控制领域的应用,并详细阐述了两者的配置、集成、控制应用和调试优化过程。首先,对LinuxCNC的基础架构、配置文件以及高级配置技巧进行了概述。随后,深入分析了EtherCAT技术的工作原理、在LinuxCNC中的集成和高级网络设置。文章进一步探讨了LinuxCNC与EtherCAT结合使用时的高级控制策略,包括复杂控制算法的实现、高级同步运动规划以及自定义用户界面的开发。最后,通过案例研究展示了这些技术在复杂控制任务中的实际应用、系统集成测试以及未来技术趋势的展望。
# 关键字
LinuxCNC;EtherCAT;配置与设置;高级控制;系统调试;案例研究
参考资源链接:[机器人控制LinuxCNC与EtherCAT介绍&&PDO&SDO,搭建环境步骤](https://wenku.csdn.net/doc/66vngtzryp?spm=1055.2635.3001.10343)
# 1. LinuxCNC与EtherCAT简介
## 1.1 LinuxCNC与EtherCAT的起源与发展
LinuxCNC是一个开源的CNC(Computer Numerical Control)系统,它基于Linux操作系统构建,并提供了用于数控机床和机器人控制的完整软件包。LinuxCNC最初基于RTAI(Real-Time Application Interface)开发,之后转向了更加灵活的RTLinux架构,使得系统能够更好地满足实时性要求较高的工业控制场景。随着时间的推移,LinuxCNC已经发展成为一个功能全面、模块化设计的CNC解决方案,能够用于多种工业应用中。
EtherCAT(Ethernet for Control Automation Technology)是由Beckhoff公司开发的一种高性能工业以太网通信技术。相较于传统的现场总线技术,EtherCAT提供了更高的数据吞吐量、更低的延迟以及更简单的网络拓扑结构。这种技术广泛应用于机器人、包装机械、木材加工机械等需要高速实时数据交换的领域。由于其性能优势,EtherCAT逐渐成为工业自动化领域的主流技术之一。
## 1.2 LinuxCNC与EtherCAT的协同工作模式
LinuxCNC与EtherCAT的结合,让工程师们能够构建出既有强大计算能力,又能实现高速实时通信的控制系统。这种组合尤其适合于那些对控制精度、响应速度和系统稳定性要求极高的应用场景。LinuxCNC负责处理复杂的运动控制算法,并将命令发送到EtherCAT驱动器,后者则将这些命令具体执行,并实时收集反馈信息。这种协同工作模式确保了系统具有极高的可靠性以及灵活性。
在本章中,我们将深入探讨LinuxCNC与EtherCAT的基础知识,为后续章节中关于配置、集成、高级应用以及调试优化等内容奠定坚实的基础。
# 2. LinuxCNC的配置与设置
## 2.1 LinuxCNC的基本概念与架构
### 2.1.1 LinuxCNC的核心组件
LinuxCNC是一个开源的CNC系统,它提供了用于操作机器的软件接口,这些接口允许用户对机床进行精确的控制。LinuxCNC的设计使得它可以在低成本的通用计算机硬件上运行。它的核心组件包括实时内核(RTAI或Xenomai)、用户界面(如axis或touch probe)、硬件抽象层(HAL)以及用于配置和运行机器的指令集。
- 实时内核:LinuxCNC使用RTAI或Xenomai内核来确保任务的实时性,这对于确保数控机床的精确和同步操作至关重要。
- 用户界面:axis是LinuxCNC最常用的用户界面,通过它可以加载配置文件、监控状态和操作机器。
- 硬件抽象层(HAL):HAL是LinuxCNC的中心组件,它允许用户创建和管理信号和函数的映射,这些映射控制着机器的硬件。
- 指令集:LinuxCNC使用G代码和M代码的指令集,这些指令直接控制机器的运动和操作。
### 2.1.2 LinuxCNC的安装与初始化
安装LinuxCNC涉及到一系列步骤,从下载合适版本到配置和运行CNC机器。安装过程会依据不同的操作系统而有所不同。对于多数Linux发行版来说,通常可以利用软件包管理器来完成安装。
1. 访问LinuxCNC官方网站下载适合您系统的版本。
2. 使用命令行安装工具,例如`apt-get`或`yum`,安装下载的包。
3. 完成安装后,需要初始化配置文件,这些文件通常位于`/usr/share/LinuxCNC/configs`目录。
4. 通过修改这些配置文件来适配您的CNC机器。
```bash
sudo apt-get install linuxcnc
sudo linuxcnc /usr/share/LinuxCNC/configs/your_machine.ini
```
在上述命令中,`linuxcnc`命令用于启动LinuxCNC,而`your_machine.ini`是您已配置好的机器配置文件。
## 2.2 LinuxCNC的配置文件详解
### 2.2.1 INI配置文件的结构与参数
INI配置文件是LinuxCNC中重要的配置方式之一,这些文件通常包含了机床的各种参数,例如轴的参数、限位开关设置、速度与加速度等。一个典型的INI文件包含几个主要部分:
- `[EMCMOT]`:电机控制模块的参数。
- `[TRAJ]`:轨迹规划器的设置,包括加速度、速度等。
- `[JOINT]`:定义了每个轴的运动学参数,如步长、最大速度等。
- `[INI]`:文件的头部信息,描述了配置文件的版本和用途。
```ini
[EMCMOT]
BASE_PERIOD = 250000 ; 电机控制周期,单位为纳秒
[TRAJ]
MAX_VELOCITY = 2000 ; 最大速度设置,单位为单位/分钟
ACCEL = 100 ; 加速度设置,单位为单位/分钟²
[JOINT_0]
AXIS = X ; 定义为X轴
MAX_VELOCITY = 1500 ; X轴的最大速度设置
```
### 2.2.2 HAL配置文件的作用与编辑
HAL(硬件抽象层)配置文件是LinuxCNC中的一个高级配置方式,它允许用户创建自定义的硬件接口和控制逻辑,而无需更改核心代码。HAL配置文件通常具有`.hal`扩展名。
HAL文件中定义了信号和组件之间的连接,这些连接构成了机器控制的逻辑。使用HAL,可以添加自定义控制算法、传感器输入和其他复杂的用户定义功能。
```hal
loadrt stepgen step_type=0,0,0,0,0,0,0,0
addf stepgen.0.update to base-thread
net x-pos-fb => stepgen.0.position
net x-dout => stepgen.0.0
net x-step => stepgen.0.1
net x-dir => stepgen.0.2
```
在上面的HAL配置示例中,我们加载了一个步进电机驱动组件,并将其与轴的位置反馈连接起来,同时定义了步进和方向信号。
## 2.3 LinuxCNC的高级配置技巧
### 2.3.1 优化实时性能的方法
LinuxCNC提供了实时性能的优化选项,这些设置对于提高CNC系统的响应速度和可靠性至关重要。实时性能优化包括对内核的调整、对线程优先级的设置等。
- 使用`chrt`命令来调整LinuxCNC进程的实时优先级。
- 配置内核的调度策略,以确保实时任务能获得及时处理。
```bash
sudo chrt -f -p 99 $(pidof linuxcnc)
```
在这个命令中,`-f`选项设置调度策略为FIFO,而`-p 99`设定了最高优先级。
### 2.3.2 自定义轴和驱动器配置
LinuxCNC允许用户根据具体的硬件需求自定义轴和驱动器配置。这通常涉及编写或修改INI和HAL配置文件,以适应特定的轴和驱动器参数。
- 自定义轴配置包括轴的最大行程、加速度和速度等。
- 自定义驱动器配置包括步进电机的细分、位置反馈等。
```ini
[JOINT_1]
AXIS = Y
MAX_VELOCITY = 1200
HOME_OFFSET = -150.0
```
通过这种方式,用户可以实现对运动控制系统的精确定制,满足特定应用的需求。
以上章节内容详细介绍了LinuxCNC的基本概念与架构、配置文件详解,以及高级配置技巧。通过深入理解和实践这些知识点,CNC程序员和工程师能够更高效地配置和优化他们的系统。在下一章节中,我们将探索EtherCAT技术原理与实践,了解这一先进网络协议如何在工业自动化领域发挥其强大的功能。
# 3. EtherCAT技术原理与实践
## 3.1 EtherCAT协议的工作原理
### 3.1.1 EtherCAT的帧结构与通信机制
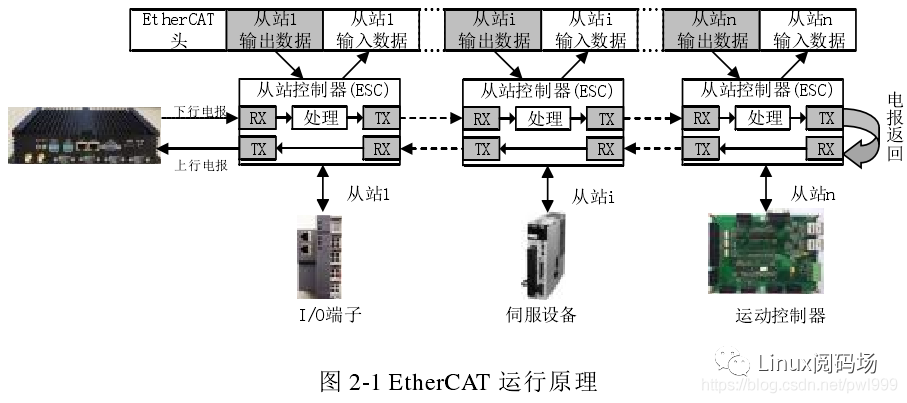
EtherCAT(Ethernet for Control Automation Technology)是一种高效、开放的工业以太网技术,专为实时控制应用设计。其核心优势在于高带宽利用率和低通信延迟。在了解其工作原理前,首先需掌握其帧结构和通信机制。
EtherCAT帧结构包含标准以太网帧头部和数据区域。头部包括目的MAC地址、源MAC地址、类型等字段。数据区域则是Ethernet帧的数据部分,用于承载用户数据。关键在于,EtherCAT使用的是串行线路拓扑,其中每个节点读取数据帧,并根据需要复制所需信息,然后帧被传递到下一个节点,这种机制称为“总线扫描”。
通信机制方面,EtherCAT利用了“数据链路层”来实现对数据的处理,可以实现在一个扫描周期内将数据从主站传输到所有从站,并将从站数据带回主站,因此

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了机器人控制中 LinuxCNC 和 EtherCAT 的应用。它从基础知识入手,涵盖了环境搭建、性能调优、PDO 和 SDO 参数设置、实时控制、网络同步技术等关键方面。通过循序渐进的讲解和实践技巧,专栏旨在帮助读者从初学者快速进阶为 LinuxCNC 和 EtherCAT 领域的专家。它还提供了解决机器人控制系统实时性能挑战的策略,并介绍了通信优化方法,以提升控制效率。本专栏适合对机器人控制、LinuxCNC 和 EtherCAT 感兴趣的工程师、研究人员和爱好者。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【单片机LED驱动秘籍】:10个步骤构建高效电路
# 摘要
随着技术的不断进步,单片机在LED驱动领域中的应用变得日益广泛。本文旨在概述单片机驱动LED的基本概念、工作原理和接口方式,并深入探讨了单片机编程基础和LED驱动电路设计原则。通过实践操作的详细说明,包括单片机选择、硬件电路搭建及软件程序编写,本文着重于构建高效稳定的LED驱动电路,并展示PW
奥迪Q5_SQ5车载娱乐系统:技术优化策略提升用户体验
# 摘要
本文对奥迪Q5与SQ5车载娱乐系统进行了深入探讨,从技术基础、用户体验优化理论、实践优化措施以及案例研究与效果评估四个方面进行详细分析。技术基础部分涵盖了车载娱乐系统的架构、通信技术和用户界面设计原则。用户体验优化理论部分探讨了用户体验的定义、重要性、用户研究方法和设计原则。实践优化措施部分则具体到奥迪Q5与SQ5的界面与交互、系统性能和定制化功能的改进。案例研究与效果评估部分通过用户反馈分析和优化策略实施案例,展示了如何通过持续评估与反馈循环进行系统优化。最后,本文预测了车载娱乐系统的智能化、安全性与隐私保护以及持续学习与自我优化的未来趋势。
# 关键字
车载娱乐系统;用户体验;
【曲线曲率分析与产品设计】:10个案例研究揭示最佳实践
# 摘要
本文详细探讨了曲线曲率分析的基础知识及其在设计领域的重要性,包括曲率的数学理论基础、在产品设计中的实践案例,以及曲率分析工具和技术的进阶应用。文章通过工业设计、建筑设计和用户界面设计等不同领域的案例,分析了曲率分析的实际应用和优化策略。同时,本文还探讨了三维建模软件中的曲率分析工具,曲率分析算法的发展,以及人工智能和新型材料中曲率分析的创新应用。最后
构建智能温控系统:MCP41010项目实战指南
# 摘要
本文综合介绍了智能温控系统的构成、工作原理及其软件设计。首先对MCP41010数字电位器和温度传感器的特性和应用进行了详细阐述,然后深入探讨了智能温控系统软件设计中的控制算法、程序编写与用户界面设计。接着,本文通过实践操作部分展
【微信小程序云开发深度解析】:无服务器架构下的高效后端处理技术

# 摘要
微信小程序云开发作为一种新兴的无服务器架构应用,结合了微信生态系统的便捷性和云技术的强大能力,极大地降低了开发者的门槛。本文首先概述了微信小程序云开发的基本概念和搭建环境的步骤,然后深入探讨了其理论基础,包括无服务器架构的技术原理、数据管理和网络能力。接着,本文通过实践应用章节,详细
【三维设计基础入门】:机械制图与三视图的奥秘

# 摘要
本文系统地介绍了三维设计与机械制图的基本概念、技巧及应用。首先概述了三视图的基本原理,包括其定义、作用以及在机械制图中的重要性。接着,深入探讨了从三视图到三维模型的转换技巧,涵盖了二维草图绘制、模型构建和工程图转换的各个方面。文章进一步分析了三视图在机械设计中的具体应用,包括设计流程、零件与装配图的绘制,以及错误
NET.VB_TCPIP性能优化秘籍:提升通信效率的5大策略

# 摘要
随着互联网应用的不断扩展,.NET VB应用程序在TCPIP通信方面的性能优化显得尤为重要。本文系统地探讨了.NET VB中的TCPIP通信原理,分析了数据传输、连接管理、资源分配等多个关键方面的优化策略。通过提升TCP连接效率、优化数
【SCPI命令进阶宝典】:解决10大SCPI命令执行问题的解决方案

# 摘要
本文全面探讨了SCPI(Standard Commands for Programmable Instruments)命令的各个方面,从基础概念、语法解析、执行问题诊断与解决,到高级应用技巧,以及在自动化测试中的应用,最终展望了其未来发展趋势。SCPI命令是自动化
【深入STM32CubeMX】:性能优化与高级设置技巧
# 摘要
STM32CubeMX作为一款高效的STM32微控制器配置工具,为开发者提供了一站式的硬件抽象层和中间件初始化配置,极大简化了基于STM32的项目开发流程。本文旨在系统地概述STM32CubeMX的核心功能,并深入探讨性能优化策略,包括时钟树和电源管理优化、代码生成及内存管理的最佳实践,以及调试和诊断技巧。同时,文章还将介绍高级配置技巧,如中断管理、外设配置
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )