Tasking编译器多任务编程:掌握并发与多核优化的艺术
发布时间: 2024-12-15 16:18:20 阅读量: 4 订阅数: 5 

Tasking 编译器用户手册
参考资源链接:[Tasking TriCore编译器用户指南:VX-toolset使用与扩展指令详解](https://wenku.csdn.net/doc/4ft7k5gwmd?spm=1055.2635.3001.10343)
# 1. 多任务编程的理论基础
## 1.1 多任务编程概述
多任务编程,是计算机科学中一种利用系统资源,同时执行多个任务的技术。在执行多任务时,操作系统能够在不同任务之间快速切换,使得每个任务都能获得合理的时间片执行,从而达到“并行”执行的效果。多任务编程的目的是提高资源利用效率,缩短任务响应时间,增加系统的吞吐量。
## 1.2 任务与线程的区别
在多任务编程中,任务与线程是两个基本概念。任务通常指的是一个逻辑上的工作单元,可以被分解为一系列操作。而线程则是操作系统能够进行运算调度的最小单位,它被包含在进程之中,是进程中的实际运作单位。线程是系统资源分配的基本单元,而任务则更多关注于逻辑的实现和完成。
## 1.3 并发与并行的原理及应用
并发指的是多个任务在同一时间段内交替执行,它们争夺CPU时间。并行则是指在任意时刻,多个任务可以同时运行,它们在不同的CPU核心或不同的机器上执行。并发通常用于单核CPU,通过时间片轮转来模拟并行,而并行则是多核时代多任务处理的主流方式。理解并发与并行的原理,有助于我们设计更加高效和优化的多任务程序。
# 2. Tasking编译器的并发控制机制
## 2.1 Tasking编译器的基本并发概念
在现代编程中,并发与并行的概念无处不在,它们是提高程序效率和响应性的关键因素。Tasking编译器正是为了解决并发编程的复杂性而生,它提供了一套高级的并发控制机制,简化了并发程序的开发过程。
### 2.1.1 任务、线程与进程的区别
在Tasking编译器中,任务、线程和进程是三种不同的并发执行单位。它们各自有着不同的使用场景和特性。
- **任务(Task)**:Tasking编译器的一个任务是一个逻辑上的执行单元,它代表了程序中可以独立执行的最小工作单元。任务可以进行创建、调度和管理,不需要操作系统级别的上下文切换开销。
- **线程(Thread)**:线程是操作系统能够进行运算调度的最小单位,它被包含在进程之中,是进程中的实际运作单位。线程共享进程的资源,但也因此导致了线程间竞争和同步问题。
- **进程(Process)**:进程是系统进行资源分配和调度的一个独立单位。每个进程都有自己的地址空间,线程是进程中的实体,是CPU调度和分派的基本单位。
### 2.1.2 并发与并行的原理及应用
并发(Concurrency)和并行(Parallelism)是两种不同的概念,它们虽然经常被交替使用,但有着本质的区别。
- **并发(Concurrency)**:指的是程序的结构允许同时存在多个执行路径。在单核处理器上,多个任务可以通过快速切换来模拟同时执行的效果。
- **并行(Parallelism)**:指的是实际物理上同时执行多个任务。多核处理器使得真正的并行成为可能,每个核心可以同时执行一个线程。
在Tasking编译器中,可以利用并发和并行特性来提高代码执行效率。同时,Tasking编译器提供的同步机制(如锁、事件和信号量)可以确保并发任务之间正确地共享资源和协调执行顺序。
## 2.2 Tasking编译器的任务创建与管理
Tasking编译器的并发编程模型基于任务这一概念,因此理解如何创建和管理任务是使用该编译器进行并发编程的基础。
### 2.2.1 任务的定义和启动方法
在Tasking编译器中,任务通过特定的语法定义。定义任务后,可以通过编译器提供的API来启动任务。
- **任务的定义**:通常通过定义一个返回`task_t`类型的任务函数来实现。任务函数一般不接受参数,也不返回值。
```c
task_t myTask(void) {
// Task code here
return 0;
}
```
- **任务的启动**:创建任务之后,可以通过调用`task_create`函数来启动任务。
```c
int main(void) {
task_t task = task_create(myTask);
if (task == NULL) {
// Handle error
}
// Continue with the rest of the program
return 0;
}
```
### 2.2.2 任务调度与优先级管理
为了有效地利用系统资源,Tasking编译器提供了任务调度机制,允许程序员指定每个任务的优先级,从而影响任务的执行顺序。
- **任务调度**:Tasking编译器实现了自己的调度器,它可以使用不同的调度算法,例如轮转调度(Round Robin)或优先级调度。
- **优先级管理**:每个任务都具有一个优先级,优先级高的任务会优先得到执行时间片。优先级可以通过`task_set_priority`函数来设置。
```c
int main(void) {
task_t task = task_create(myTask);
if (task == NULL) {
// Handle error
}
task_set_priority(task, 1); // Set higher priority
// Continue with the rest of the program
return 0;
}
```
## 2.3 Tasking编译器的同步与通信
在多任务编程中,任务间的数据共享和同步是至关重要的。Tasking编译器提供了多种机制来确保任务间可以安全地通信和同步。
### 2.3.1 任务间的同步机制
同步机制主要用来控制任务间的执行顺序,避免数据竞争和条件竞争。
- **互斥锁(Mutexes)**:互斥锁是一种常用的同步机制,它可以确保同一时间只有一个任务可以访问共享资源。
```c
mutex_t lock;
void task_with_resource(void) {
mutex_lock(&lock); // Acquire the lock
// Access shared resource
mutex_unlock(&lock); // Release the lock
}
```
- **条件变量(Condition Variables)**:条件变量允许任务在某个条件未满足时等待,直到被其他任务通知。
```c
condition_t cond;
mutex_t lock;
void wait_for_signal(void) {
mutex_lock(&lock);
while (!condition_met) {
condition_wait(&cond, &lock); // Wait for condition
}
// Perform actions after condition is met
mutex_unlock(&lock);
}
```
### 2.3.2 任务间的数据通信方法
任务间的数据通信对于实现复杂的功能是必不可少的。Tasking编译器支持多种数据通信方法,包括共享内存、消息队列和事件。
- **共享内存(Shared Memory)**:通过在多个任务间共享内存块来实现数据通信。
```c
void producer(void) {
shared_data = produce_data();
}
void consumer(void) {
while (data_available() == false);
consume_data(shared_data);
}
```
- **消息队列(Message Queues)**:消息队列允许任务发送和接收消息。
```c
message_queue_t queue;
void send_message(void) {
message_t msg;
msg.data = some_data;
message_queue_send(&queue, &msg);
}
void receive_message(void) {
message_t msg;
message_queue_receive(&queue, &msg);
// Process received message
}
```
- **事件(Events)**:任务可以通过事件来通知其他任务事件的发生。
```c
event_t event;
void wait_for_event(void) {
event_wait(&eve
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【矩阵与向量的秘密】:新手入门必看的线性代数基础知识
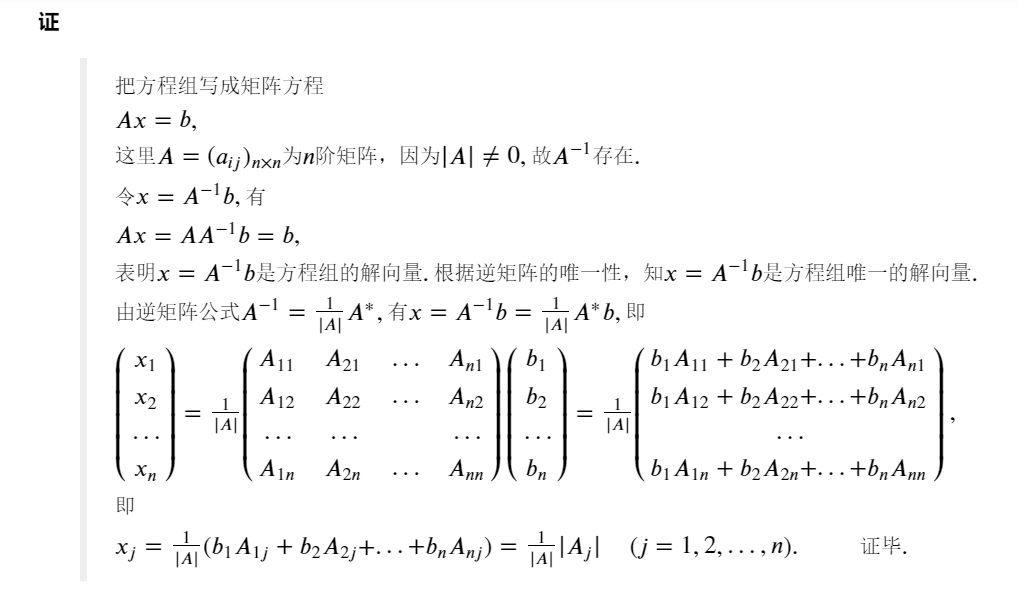
参考资源链接:[兰大版线性代数习题答案详解:覆盖全章节](https://wenku.csdn.net/doc/60km3dj39p?spm=1055.2635.3001.10343)
# 1. 矩阵与向量基础
在进入复杂的数据结构和算法之前,让我们先夯实数学基础。矩阵和向量作为线性代数的核心,它们不仅是理论概念,更是理解和解决实际问题的关键。本章将介绍矩阵与向量的基本概念、性质和计算方法。
## 1.1 向量与矩阵的定义
向量可
【提升部署效率:源码打包最佳实践】:企业网站部署的捷径
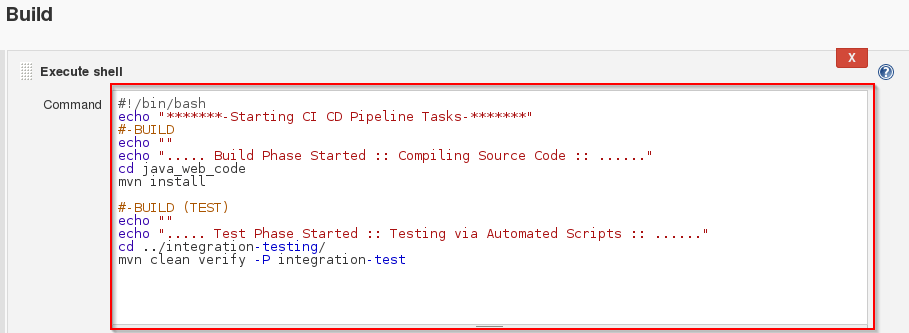
参考资源链接:[50套企业级网站源码打包下载 - ASP模板带后台](https://wenku.csdn.net/doc/1je8f7sz7k?spm=1055.2635.3001.10343)
# 1. 源码打包在企业部署中的重要性
在现代软件开发实践中,源码打包是一个不可或缺的环节,尤
【AnyBody 5.0 肌肉和骨骼建模方法】:实现高精度人体模拟的专家指南

参考资源链接:[AnyBody 5.0中文教程:全面解锁建模与AnyScript应用](https://wenku.csdn.net/doc/6412b6ffbe7fbd1778d48ba9?spm=1055.2635.3001.10343)
# 1. AnyBody建模方法概述
## 1.1 AnyBody
DX Designer中文教程:一步到位掌握界面布局与基础操作
参考资源链接:[PADS DX Designer中文教程:探索EE7.9.5版](https://wenku.csdn.net/doc/6412b4cebe7fbd1778d40e2b?spm=1055.2635.3001.10343)
# 1. DX Designer入门基础
## 1.1 DX Designer简介
DX Designer
【超声波清洗机电路设计大揭秘】:构建高效系统的5个要点

参考资源链接:[超声波清洗机电路原理图.pdf](https://wenku.csdn.net/doc/6401ad02cce7214c316edf5d?spm=1055.2635.3001.10343)
# 1. 超声波清洗机电路设计概述
超声波清洗机作为一种现代精密清洁设备,广泛应用于工业和实验室环境中。电路设计是其核心组成部分,关乎设备的性能和安全性。在开始设计之前,需要理解
从零到一打造StarMade模组:跟着专家学习StarModAPI

参考资源链接:[StarModAPI: StarMade 模组开发的Java API工具包](https://wenku.csdn.net/doc/6tcdri83ys?spm=1055.2635.3001.10343)
# 1. StarMade模组开发入门指南
欢迎来到StarMade模组开发的世界。本章将为你介绍如何开始你的模组开发之旅。从环境搭建到编写你的第一行代码,我们会详细讲解
优化工作流:如何高效配置DALSA相机外触发功能

参考资源链接:[DALSA相机外触发设置与连接](https://wenku.csdn.net/doc/6412b70ebe7fbd1778d48efb?spm=1055.2635.3001.10343)
# 1. DALSA相机外触发功能简介
## 1.1 功能概述
DALSA相机的外触发功能是一种极为重要的特性,允许相机按照外部事件的信号来捕捉图像。这种功能在
【SV660N伺服反馈系统解析】:优化与维护反馈机制的专家指南

参考资源链接:[汇川SV660N伺服调试指南:高性能自动化设备控制](https://wenku.csdn.net/doc/5dwq6jzhf6?spm=10
【Origin高级分析】:提升数据处理效率,排查实验数据难题
参考资源链接:[Origin作图指南:快速掌握论文天线方向图绘制](https://wenku.csdn.net/doc/2ricj320jm?spm=1055.2635.3001.10343)
# 1. Origin软件概述与数据处理基础
Origin是一个功能强大的科学绘图与数据分析软件,广泛应用于科学研究和工程领域。它是OriginLab公司推出的一款
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )