【Turbo PMAC多轴控制深度案例】:揭秘复杂项目背后的运动控制
发布时间: 2024-12-14 06:40:40 阅读量: 7 订阅数: 9 

废物垃圾检测36-COCO、CreateML、Darknet、Paligemma、TFRecord、VOC数据集合集.rar

参考资源链接:[Turbo PMAC(PMAC2)中文软件手册:I、M变量详解](https://wenku.csdn.net/doc/64785e65d12cbe7ec32f7414?spm=1055.2635.3001.10343)
# 1. Turbo PMAC多轴控制基础概念
在了解和应用Turbo PMAC多轴控制系统之前,基础概念的掌握是关键。Turbo PMAC是高性能的运动控制解决方案,由Delta Tau Data Systems开发。它能够控制多轴机器人、生产线和其他自动化设备,实现复杂的运动任务。本章将介绍PMAC的核心功能和如何在自动化系统中实现精确控制。
## 1.1 多轴控制技术简介
多轴控制是指同时协调多个运动轴,以完成特定任务的技术。在自动化领域,这种控制技术广泛应用在工业机器人、飞行模拟器、医疗器械等设备中。多轴控制使得设备的运动更为流畅且更加精确,能够提升生产效率和产品质量。
## 1.2 Turbo PMAC的特点
Turbo PMAC以其高可靠性、高性能和易编程性著称。它采用开放的架构,支持多种编程语言和通讯协议,用户可以根据自己的需求定制控制策略。此外,Turbo PMAC的实时操作系统保证了执行多任务和复杂路径规划的能力。
## 1.3 实际应用场景
在实际应用中,Turbo PMAC可以用于控制机床、装配线、3D打印设备等多种自动化系统。它可以执行复杂的轨迹规划,实现快速、精确的多轴运动控制,满足高动态性能和高精度定位的需求。这种控制系统的灵活性和扩展性,使得它成为工业自动化领域的理想选择。
# 2. Turbo PMAC硬件与软件架构
## 2.1 Turbo PMAC硬件组件解析
### 2.1.1 控制器与驱动器的关系
在多轴运动控制领域,控制器和驱动器之间的关系是协调工作、相互依赖的。控制器,作为指挥中心,负责解析上层应用层指令,生成电机运行参数,如速度、加速度、目标位置等,然后通过通信接口发送给驱动器。驱动器接收到这些参数后,将其转换成电机能够理解和执行的电信号,驱动电机进行精确的运动。
这种硬件层面的交互机制,是多轴联动控制得以实现的基础。要使两者协同工作,必须确保控制器与驱动器之间参数配置的一致性以及通信的顺畅性。控制器向驱动器传递的参数必须精确无误,才能确保运动控制的准确性。同时,驱动器的性能也直接影响到整个控制系统的响应速度和控制精度。
从编程的角度来看,开发者需要充分理解控制器与驱动器之间的数据传输协议,确保数据的准确性和实时性。例如,在Turbo PMAC控制系统中,通常使用专门的指令集来配置控制器和驱动器的工作参数。以下是配置驱动器参数的一个实例代码块及其解释:
```pmac
! 设定驱动器A的使能端口
#1001 = 2
! 设定驱动器A的加速度
#1002 = 100000
! 设定驱动器A的目标位置
#1003 = 0
```
### 2.1.2 伺服电机与反馈系统
伺服电机是执行机构中完成实际运动的核心部件,而反馈系统则是用来确保电机按照预期轨迹进行运动的监督系统。反馈系统主要由编码器构成,它能实时监测电机的旋转角度和速度,提供必要的位置和速度反馈数据给控制器。
编码器将物理位置转换为电子信号,控制器使用这些信号来检测实际位置与目标位置之间的差异,并据此生成新的运动指令,以修正电机的实际运动轨迹。此外,编码器的反馈信息对于系统的稳定性和控制精度至关重要,任何编码器的故障或读数误差都可能导致运动控制的偏差。
在Turbo PMAC系统中,反馈系统的配置同样是通过一系列的指令来完成的。例如,配置编码器的分辨率和类型可能涉及到如下代码块:
```pmac
! 配置编码器A的分辨率和类型
#1400 = 4096 ; 分辨率为4096脉冲/圈
#1401 = 0 ; 编码器A为增量式编码器
```
## 2.2 Turbo PMAC软件环境搭建
### 2.2.1 PMAC软件的安装与配置
安装Turbo PMAC软件是使用控制器的第一步,软件的配置对于后续的程序开发和调试至关重要。安装过程一般涉及几个关键步骤,如系统兼容性检查、驱动程序安装、软件安装包的解压缩和软件环境变量的配置。
在Windows环境下,安装通常较为简单,只需运行安装向导,跟随提示完成安装。而在Linux环境下,则可能需要手动配置内核模块和权限,确保软件的正常运行。Turbo PMAC提供了详细的安装文档和用户手册,以指导用户完成安装过程。
在配置环节,用户需要根据实际的硬件连接情况(如串口、网口等)来设置通信参数,确保软件能够与控制器硬件正确通信。此外,根据不同的应用场景,还需要配置相关的用户程序、脚本和监控界面等。
### 2.2.2 开发环境和调试工具的选择
选择合适的开发环境和调试工具对于开发效率和程序质量都有着重要的影响。对于Turbo PMAC,通常可以使用其自带的IDE(集成开发环境)进行程序的编写、编译和调试。该IDE提供了语法高亮、代码自动完成等便捷功能,而且集成了调试工具,可以直接进行断点调试、变量监视等。
除了自带的IDE外,许多开发者可能更倾向于使用他们熟悉的通用IDE如Visual Studio Code,通过安装相应的插件,也可以实现对PMAC程序的编写和调试。一些第三方的调试工具,比如串口监控软件,也经常被用于辅助调试,以实时查看控制器和驱动器的通信数据。
在本小节中,我们主要介绍了Turbo PMAC控制器的硬件组件解析和软件环境的搭建方法,深入理解这些基础知识,对于后期的多轴控制程序开发至关重要。接下来的章节,我们将进一步探讨Turbo PMAC的编程基础以及多轴控制的理论与实践。
# 3. Turbo PMAC多轴控制的理论与实践
在本章节中,我们深入探讨Turbo PMAC多轴控制的理论基础和实际应用,旨在为读者提供一个关于如何实现复杂多轴同步控制以及优化控制性能的全面理解。
## 3.1 多轴同步与协调理论
### 3.1.1 同步机制的基本原理
在多轴控制系统中,同步机制是确保多个轴协调运动,完成指定任务的关键。理解同步机制的原理对于设计高效的控制策略至关重要。Turbo PMAC通过其高级指令集,可以实现复杂的同步控制策略。
同步机制的核心在于确保各个轴的运动轨迹、速度以及加速度等参数的精确配合。Turbo PMAC提供了多种同步模式,包括电子齿轮和电子凸轮。这些模式允许控制器根据预先设定的比率或曲线,同步控制多个轴的运动。
例如,通过设置电子齿轮比,可以将一个轴的速度与另一个轴的速度关联起来,以达到同步运动的目的。如果轴A是驱动轴,那么轴B的运动速度将通过公式 V_B = Ratio * V_A 计算得到,其中 Ratio 是设定的电子齿轮比。
### 3.1.2 协调运动的数学模型
为了达到完美的协调运动,需要建立精确的数学模型来描述各轴之间的运动关系。这些模型包括动力学方程、运动方程以及可能的运动约束。
在Turbo PMAC中,这些数学模型被编码为程序指令,用于指导控制器如何响应外部输入或执行预设的运动任务。高级用户可以通过编写PMAC程序,直接控制运动学的参数,如加速度、减速度、位置、速度等。
在实际应用中,一个典型的任务是控制一个机械臂在空间中精确地从一个位置移动到另一个位置。为了实现这一点,我们需要解算正运动学和逆运动学方程,以确定各关节轴的运动轨迹和参数。
## 3.2 多轴控制的程序实现
### 3.2.1 编写多轴运动程序
编写多轴运动程序涉及多个层面的考量,包括运动轨迹规划、速度曲线优化以及实时系统反馈控制。PMAC提供了丰富的编程命令,如运动指令(如MOVE、PVT等),状态查询指令(如?VEL、?POS等),以及同步控制

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《Turbo PMAC 软件参考手册中文版》专栏深入探讨了 Turbo PMAC 运动控制器的强大功能和应用。它涵盖了从高级运动控制技术到故障排除技巧、性能优化策略和多轴控制案例的广泛主题。专栏还详细介绍了 Turbo PMAC 的安全功能、实时系统、与 PLC 集成的策略、自定义指令的开发技巧以及在精密定位和 I/O 管理中的应用。通过深入的分析和实用的指南,该专栏为工程师和技术人员提供了全面了解 Turbo PMAC 的工具和技术,帮助他们优化运动控制系统,实现卓越的性能和可靠性。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【DIAdem 2020 测试数据高效管理】:专业组织与检索秘籍大公开
参考资源链接:[DIAdem 2020中文教程:交互式数据分析与技术支持详解](https://wenku.csdn.net/doc/70ippcsgku?spm=1055.2635.3001.10343)
# 1. DIAdem 2020 测试数据管理概述
数据是现代测试与测量行业的生命线,而数据管理则是确保这些生命线得以高效利用的关键。在本章中,我们将首先探
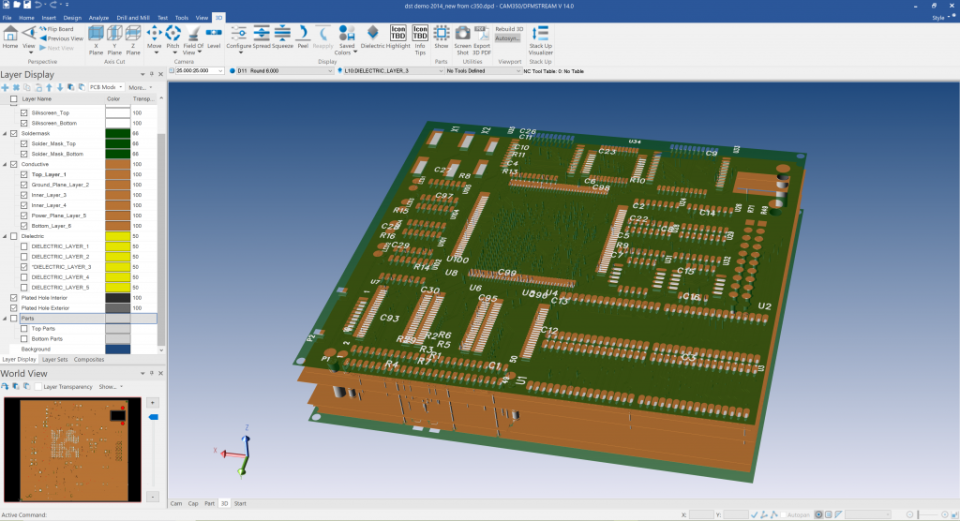
CAM350优化方案:提高检查效率的10大策略
参考资源链接:[CAM350检查开短路](https://wenku.csdn.net/doc/6469cf105928463033e20285?spm=1055.2635.3001.10343)
# 1. CAM350软件概述
## 1.1 CAM350软件简介
CAM350是业内广泛使用的一款PCB制
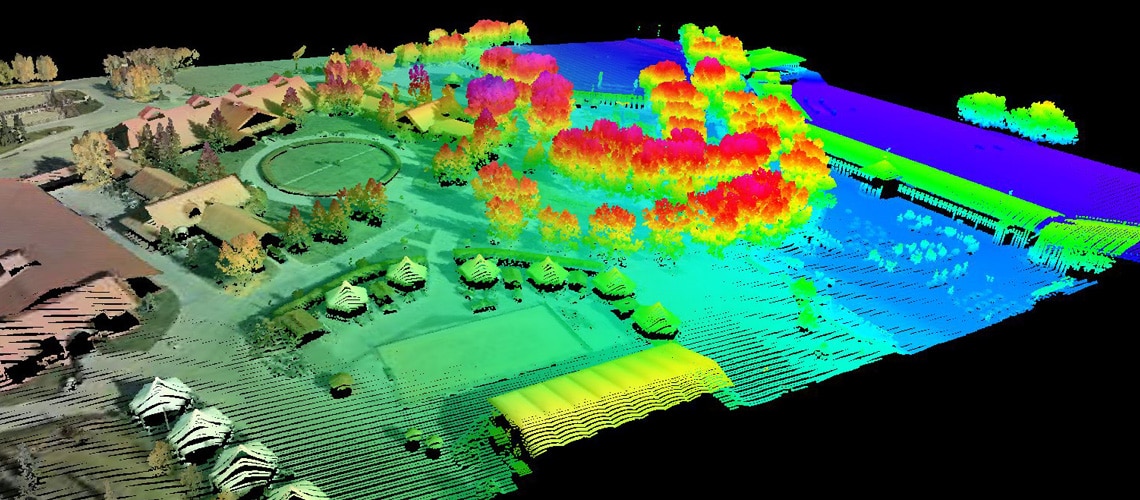
个性化界面与工具栏设置:Geomatica 2020定制指南的精髓
参考资源链接:[PCI Geomatica2020中文用户手册:从入门到精通](https://wenku.csdn.net/doc/32ehwsi2un?spm=1055.2635.3001.10343)
# 1. Geomatica 2020概览与定制基础
Geomatica 2020是一款功能强大的地理信息系统(GIS),专注于提供精确的数据分析和处理能力。对于5
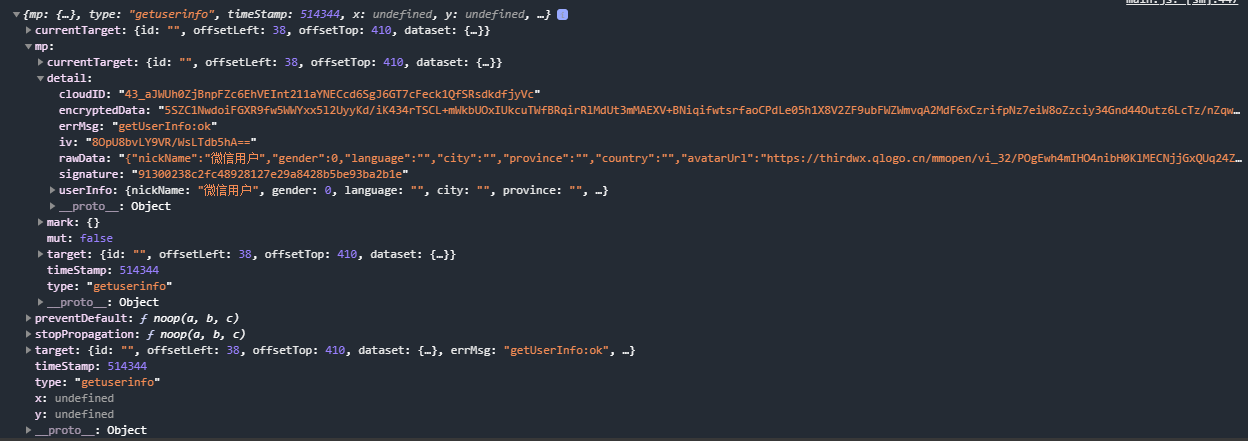
企业微信与OAuth2.0深度解析:授权模式与身份校验不再难
参考资源链接:[企业微信网页授权登录流程与code获取详解](https://wenku.csdn.net/doc/5g294iatg3?spm=1055.2635.3001.10343)
# 1. 企业微信与OAuth2.0概览
企业微信作为一款企业级
【SPD标准化解读】:深入分析JEDEC JESD400-5中的内存参数

参考资源链接:[DDR5 SPD规格:JEDEC JESD400-5详解](https://wenku.csdn.net/doc/6r5mbz0dzf?spm=1055.2635.3001.10343)
# 1. 内存标准化概述
内存标准化是确保内存组件可以跨不同硬件平台和操作系统兼容使用的关键。标准化不仅仅简化了硬件设计和制造过程,还为最终用户提供了稳定性和可靠性保障。本章
【HFSS 3D Layout多物理场耦合】:电路设计中的热-电耦合问题解决方案
参考资源链接:[HFSS 3D Layout用户手册:全面指南](https://wenku.csdn.net/doc/6412b6edbe7fbd1778d48793?spm=1055.2635.3001.10343)
# 1. HFSS 3D Layout基础概述
## 1.1 HFSS 3D Layout简介
HFSS 3D Layout是
SystemVerilog 3.1a测试平台开发:专家级测试用例编写秘诀

参考资源链接:[SystemVerilog 3.1a语言参考手册:PDF中文版详解与特性概览](https://wenku.
LPDDR4 vs LPDDR3:揭秘JESD209-4D标准下的性能突破
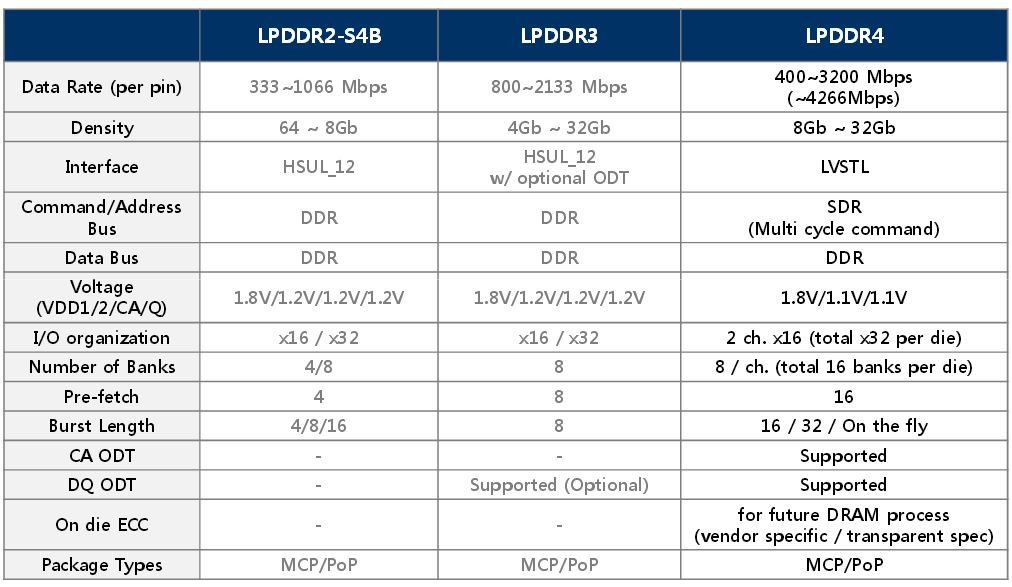
参考资源链接:[JESD209-4D - LPDDR4](https://wenku.csdn.net/doc/53k2xuc4ts?spm=1055.2635.3001.10343)
# 1. LPDDR4与LPDDR3技术概述
## 1.1 LPDDR技术的引入及其重要性
LPDDR(Low Power Double Data
【噪声消除神技】:FK变换在地震信号增强中的实际效能
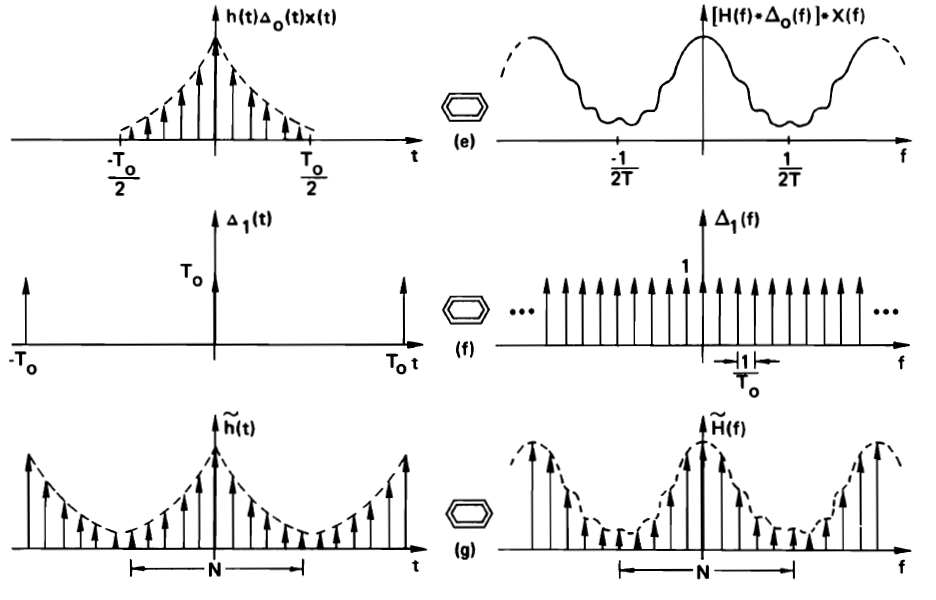
参考资源链接:[Lupei Zhu教授的FK工具包:水平分层模型格林函数计算与地震图合成教程](https://wenku.csdn.net/doc/6412b70abe7fbd1778d48e0d?spm=1055.2635.3001.10343)
# 1. 地震信号处理概述
在地震学研究中,地震信号处理是关键的环节,其目的是提高信号的识别精度,进而为地质结构的分析提供更为准确的数据支持。传统的地震数据处理方法主要集中在时间域和频率域。然而,随着研究的深
ISP图像调优进阶篇:掌握高级参数,优化图像质量的专家级指南(高级调优必备)
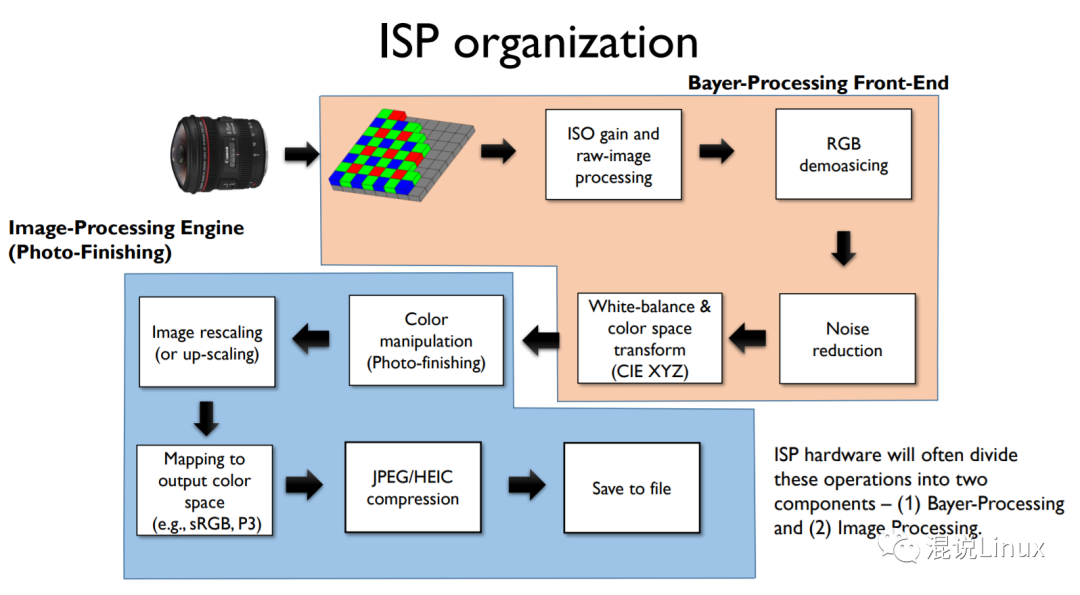
参考资源链接:[海思ISP图像调优指南](https://wenku.csdn.net/doc/7wdj2zcgcp?spm=1055.2635.3001.10343)
# 1. ISP图像调优的基础理解与应用
在当今数字化时代,图像信号处理器(ISP)作为智能设备中不可或缺的一部分,承担着将原始图
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )