STM32L431通信接口全解:USART、I2C、SPI、CAN总线,玩转多种通信协议
发布时间: 2025-01-02 22:37:41 阅读量: 57 订阅数: 41 

# 摘要
本文全面介绍了STM32L431微控制器的通信接口功能,深入解析了其支持的USART、I2C、SPI以及CAN总线通信协议。首先,文章对每种协议的理论基础、初始化配置、数据传输及错误处理进行了详细阐述。接着,探讨了高级应用,如多通道通信接口配置、中断处理和DMA传输的实践方法。最后,文章论述了通信接口的故障诊断和性能优化策略,提供了故障诊断的常见原因和方法,并展示了性能优化的实用技术。本研究旨在为开发者提供STM32L431在多样化应用环境中的有效通信解决方案。
# 关键字
STM32L431;通信协议;USART;I2C;SPI;CAN总线
参考资源链接:[STM32L431参考手册:全面解析ARM Cortex-M4微控制器](https://wenku.csdn.net/doc/6401acf1cce7214c316edb77?spm=1055.2635.3001.10343)
# 1. STM32L431基础介绍
## 1.1 STM32L431概述
STM32L431是STMicroelectronics推出的一款低功耗微控制器,属于STM32L4系列。它搭载了ARM® Cortex®-M4核心,工作频率高达80 MHz,并且具备丰富的外设接口。这一系列微控制器以其低功耗特性、高效的性能和灵活的电源管理而著称,特别适合于便携式设备和物联网(IoT)应用。
## 1.2 核心特性
该芯片的核心特性包括:
- **低功耗**:支持多种低功耗模式,包括睡眠、停止和待机模式,以满足能效需求。
- **性能与效率**:集成了ART加速器,能够提高指令执行速度。
- **丰富的通信接口**:包括USART、I2C、SPI以及CAN总线等多种通信协议,适合多种场景下的数据交换和通信需求。
## 1.3 应用领域
STM32L431广泛应用于工业自动化、医疗设备、可穿戴技术和消费电子等领域。它的低功耗和高效性能使其成为设计紧凑型高性能设备的理想选择。
在后续章节中,我们将深入探讨STM32L431的通信协议及其应用,揭示其在数据通信中的实际运用和优化方法。
# 2. ```
# 第二章:深入理解STM32L431的通信协议
STM32L431微控制器由于其在功耗和性能之间的优秀平衡,成为了嵌入式系统设计者们的热门选择。本章节将深入探讨STM32L431支持的几种主要通信协议:USART、I2C、SPI和CAN总线通信协议。每个通信协议将分别详细介绍其理论基础,配置步骤,数据传输方法以及在遇到错误时的处理策略。
## 2.1 USART通信协议的理论与实践
### 2.1.1 USART协议的基本概念和工作机制
USART(Universal Synchronous and Asynchronous Receiver Transmitter)是一种常见的串行通信协议,支持同步和异步通信模式。在异步模式下,数据在两个设备之间以帧的形式传输,每个帧开始是一个起始位,然后是数据位(通常为8位),可选的奇偶校验位和一个或多个停止位。同步模式中,数据以字节或字为单位进行同步传输,通常使用外部或内部时钟信号。
在STM32L431微控制器上,USART通信协议可实现高达115.2kbps的数据速率。通过硬件流控制可以减少通信错误,提高数据传输的可靠性。
### 2.1.2 USART的初始化和配置方法
对于STM32L431而言,USART初始化和配置需要通过其硬件抽象层(HAL)库函数完成。例如,初始化一个USART实例可能包括以下步骤:
1. 选择合适的时钟源。
2. 设置波特率,这决定了数据传输的速度。
3. 配置数据帧格式,包括数据位、停止位和奇偶校验位。
4. 启用或禁用硬件流控制,如果需要的话。
5. 启动USART。
以下是一个简单的代码示例,展示了如何初始化一个USART接口:
```c
/* 初始化USART1,波特率9600,8数据位,1停止位,无奇偶校验位 */
void USART1_Init(void)
{
/* 1. 使能GPIOA和USART1时钟 */
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_USART1_CLK_ENABLE();
/* 2. 初始化USART1的TX(PA9)和RX(PA10)引脚 */
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.Pin = GPIO_PIN_9 | GPIO_PIN_10;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF7_USART1;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* 3. 配置USART1参数 */
usart_handle.Instance = USART1;
usart_handle.Init.BaudRate = 9600;
usart_handle.Init.WordLength = USART_WORDLENGTH_8B;
usart_handle.Init.StopBits = USART_STOPBITS_1;
usart_handle.Init.Parity = USART_PARITY_NONE;
usart_handle.Init.Mode = USART_MODE_TX_RX;
usart_handle.Init.HwFlowCtl = USART_HWCONTROL_NONE;
usart_handle.Init.OverSampling = USART_OVERSAMPLING_16;
HAL_USART_Init(&usart_handle);
}
/* 假设 usart_handle 已经在其他地方定义和配置 */
```
初始化完成后,就可以使用该USART实例进行数据的发送和接收了。
### 2.1.3 USART的数据传输和错误处理
数据传输通过调用发送和接收函数完成,如 `HAL_USART_Transmit()` 和 `HAL_USART_Receive()`。错误处理通常涉及到检查状态寄存器中的错误标志位,并进行相应的处理。
```c
/* 发送数据 */
HAL_USART_Transmit(&usart_handle, (uint8_t*)data, size, timeout);
/* 接收数据 */
HAL_USART_Receive(&usart_handle, (uint8_t*)buffer, size, timeout);
/* 错误处理 */
if (__HAL_USART_GET_FLAG(&usart_handle, USART_FLAG_PE) != RESET)
{
// 处理奇偶校验错误
}
if (__HAL_USART_GET_FLAG(&usart_handle, USART_FLAG_FE) != RESET)
{
// 处理帧错误
}
if (__HAL_USART_GET_FLAG(&usart_handle, USART_FLAG_NE) != RESET)
{
// 处理噪声错误
}
if (__HAL_USART_GET_FLAG(&usart_handle, USART_FLAG_ORE) != RESET)
{
// 处理溢出错误
}
```
错误处理对于保证通信的可靠性至关重要,特别是在数据传输过程中。
## 2.2 I2C通信协议的理论与实践
### 2.2.1 I2C协议的基本概念和工作机制
I2C(Inter-Integrated Circuit)是一种多主机、多从机的串行通信总线。它只需要两条信号线:串行数据线(SDA)和串行时钟线(SCL),就能够支持多个从机设备连接到同一个总线上,由主机控制数据的传输。
STM32L431微控制器通过I2C接口可以与各种传感器、EEPROM等设备通信。I2C总线的工作模式可以是7位地址模式或10位地址模式,支持多主模式。
### 2.2.2 I2C的初始化和配置方法
在STM32L431上,初始化I2C需要通过HAL库的函数设置I2C的时钟速率,地址模式等参数,并启动I2C接口。以下为初始化I2C的一个例子:
```c
/* 初始化I2C1,速度100kHz */
void I2C1_Init(void)
{
/* 1. 使能GPIOB和I2C1时钟 */
__HAL_RCC_GPIOB_CLK_ENABLE();
__HAL_RCC_I2C1_CLK_ENABLE();
/* 2. 初始化I2C1引脚 */
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.Pin = GPIO_PIN_6 | GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_AF_OD;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF4_I2C1;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/* 3. 配置I2C参数 */
i2c_handle.Instance = I2C1;
i2c_handle.Init.Timing = 0x307075B1; /* 100kHz */
i2c_handle.Init.OwnAddress1 = 0;
i2c_handle.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
i2c_handle.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
i2c_handle.Init.OwnAddress2 = 0;
i2c_handle.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
i2c_handle.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
HAL_I2C_Init(&i2c_handle);
}
```
### 2.2.3 I2C的数据传输和错误处理
I2C的数据传输通过 `HAL_I2C_Mem_Write()` 和 `HAL_I2C_Mem_Read()` 等函数完成。错误处理涉及到检查状态寄存器的错误标志,并进行相应的处理。
```c
/* 写数据 */
HAL_I2C_Mem_Write(&i2c_handle, I2C_ADDRESS, REG_ADDR, I2C_MEMADD_SIZE_8BIT, (uint8_t*)data, size, timeout);
/* 读数据 */
HAL_I2C_Mem_Read(&i2c_handle, I2C_ADDRESS, REG_ADDR, I2C_MEMADD_SIZE_8BIT, (uint8_t*)buffer, size, timeout);
/* 错误处理 */
if (__HAL_I2C_GET_FLAG(&i2c_handle, I2C_FLAG_AF) != RESET)
{
// 处理应答失败错误
}
if (__HAL_I2C_GET_FLAG(&i2c_handle, I2C_FLAG_BERR) != RESET)
{
// 处理总线错误
}
```
## 2.3 SPI通信协议的理论与实践
### 2.3.1 SPI协议的基本概念和工作机制
SPI(Serial Peripheral Interface)是一种常用的全双工同步串行通信协议,它使用主从架构,其中主机产生时钟信号并控制数据传输。SPI支持多个从机设备连接,由主机通过选择线(CS)来控制哪个从机参与通信。
在STM32L431微控制器中,SPI支持高达30MHz的数据速率,有四种数据传输模式,通过时钟极性和相位来选择。
### 2.3.2 SPI的初始化和配置方法
初始化SPI需要配置时钟速率,数据格式和传输模式等。以下是一个简单的SPI初始化代码示例:
```c
/* 初始化SPI1,模式0,最大8MHz */
void SPI1_Init(void)
{
/* 1. 使能GPIOA和SPI1时钟 */
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_SPI1_CLK_ENABLE();
/* 2. 初始化SPI1引脚 */
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.Pin = GPIO_PIN_5 | GPIO_PIN_6 | GPIO_PIN_7

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《STM32L431参考手册.pdf》专栏深入剖析了STM32L431微控制器,涵盖了从内核架构到低功耗模式优化、中断管理、通信接口、ADC/DAC转换、PWM技术应用、内存管理、RTC时钟、蓝牙/Wi-Fi集成、触摸感应技术、电源管理、显示技术、多任务编程和音频处理等方方面面。专栏提供了15个关键技巧,帮助读者成为微控制器专家,并全面解析了STM32L431的引导、固件升级、睡眠至待机等系统启动全攻略,以及USART、I2C、SPI、CAN总线等通信接口的详细讲解。通过学习本专栏,读者可以掌握STM32L431的精髓,提升编程效率,并将其应用于各种嵌入式系统设计中。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
Trace32工具全方位解读:从基础入门到高级应用及性能优化秘籍(共20个核心技巧)
# 摘要
Trace32是一种广泛应用于嵌入式系统的调试工具,本文详细介绍了Trace32的安装、基础操作、高级应用、数据可视化及报告生成等方面。首先,本文概述了Trace32工具的基本信息及安装流程。随后,针对用户界面、基本命令、进程与线程追踪、内存和寄存器分析等基础操作提供了详细指导。文章进一步探讨了Trace32在性能分析、多核多线程调试以及脚本编程和自动化测试的高级应用。在数据可视化与报告方
新版本AIF_Cookbook v4.0全面剖析:掌握每个新特性
# 摘要
本文针对AIF_Cookbook v4.0版本进行了全面的介绍和分析,重点探讨了该版本新特性的理论基础、实践指南、性能优化、故障排除以及集成与部署策略。首先,文章概览了新版本的核心概念及其对实践应用的影响,并探讨了新引入算法的原理及其在效率和准确性上的提升。接着,通过核心功能的实践案例和数
LDAP集成新手必读:掌握Java与LDAP的20个实战技巧

# 摘要
本论文系统地阐述了LDAP基础及其与Java的集成技术。首先介绍了LDAP的数据模型、目录结构以及基本的查看和管理方法,为后续深入探讨Java与LDAP的交互操作打下基础。接着,文章详细说明了如何使用Java LDAP API进行基础的交互操作,包括搜索、用户和组管理等。进一步地,本文深入分析了LDAP的认证机制和安全配置,包括安全连接的配置与优化以及访问控制与权限管理。文章还
【安捷伦万用表技术优势】:揭秘专业用户为何偏爱6位半型号
# 摘要
本文系统介绍了安捷伦万用表的技术细节、行业应用案例以及未来技术趋势。首先概述了安捷伦万用表的基本情况,随后深入解析了其技术规格,包括精准度、分辨率、采样率、数据吞吐以及隔离和安全性能。接着,本文探讨了安捷伦6位半万用表在实验室精密测试、制造业质量控制以及研究与开发中的创新应用。此外,还分析了安捷伦万用表软件工具的功能,如数据采集与分析、自动化测试与控制和远程操作与维护。最后,本文
故障清零:WhateverGreen.kext_v1.5.6在黑果安装中的问题解决专家

# 摘要
WhateverGreen.kext是一款在MacOS黑果安装中广泛使用的内核扩展,它为不同的显卡提供了必要的驱动支持与配置选项。本文首先介绍了WhateverGreen.kext的作用及其重要性,然后详细阐述了在黑果安装中的基础设置步骤和基本配置方法,包括安装过程和修改配置文件的技巧。此外,还探讨了在安装和运行过程中可能遇到的常见问题及其解决策略,
AD630物联网应用挑战与机遇:深入解读与应对策略!
# 摘要
物联网作为技术进步的产物,为各行业提供了全新的应用模式和业务发展机会。本文首先介绍了物联网的定义,并对AD630芯片的技术规格及其在物联网领域的优势进行了概述。随后,探讨了物联网架构的关键技术,包括传感器、通信协议和数据处理技术,并分析了物联网安全与隐私保护的重要性和相关策略。通过智能家居、工业物联网和健康医疗等实践案例,展示了AD630芯片的多样化应用,并讨论了在这些应用中遇到的技术挑战
破解Windows XP SP3:驱动集成的高级技巧与最佳实践
# 摘要
Windows XP Service Pack 3(SP3)是微软公司推出的最后一个针对Windows XP操作系统的更新,它改进了系统的安全性、性能和兼容性。本文首先对Windows XP SP3进行概述,并在此基础上探讨驱动集成的理论基础,包括驱
【电源设计进阶】:MOS管驱动电路热管理的策略与实践
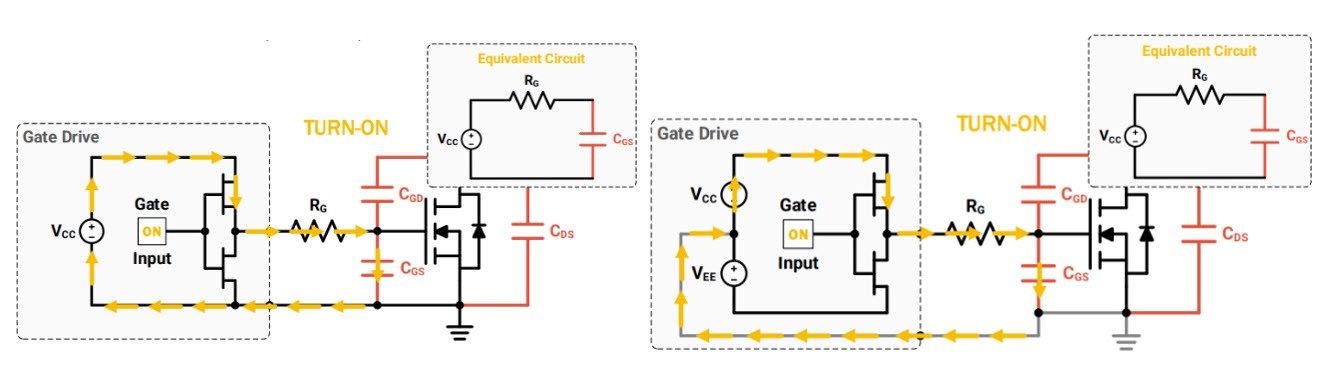
# 摘要
本文探讨了电源设计中MOS管驱动的重要性,分析了MOS管的基本原理与特性及其在电源设计中的作用,同时重点研究了MOS管驱动电路面临的热管理挑战。文章详细介绍了热效应的产生、影响,以及驱动电路中热量分布的关键因素,探讨了有效的散热策略和热管理技术。此外,本文还基于理论基础,讨论了热管理的计算方法、模拟仿真,以及热设计的数
【充电机安全标准完全手册】:国际规范的设计与实施

# 摘要
充电机作为电动汽车关键基础设施,其安全性对保障车辆和用户安全至关重要。本文首先强调了充电机安全标准的必要性和意义,随后全面回顾了充电机国际安全标准的演变历程及其关键要求,如安全性能和电磁兼容性。在理论基础方面,文章深入探讨了充电机设计原则、结构安全性分析和智能化安全监控。实践应用案例章节提供了商用充电桩、家用充电机以及维修更新方面的安全指南。最后,文章展望了未来充电机安全标准的发展趋势,重点分析了新兴技术、政策法规以及跨界合作对充电机
【MATLAB控制策略设计】:机电系统仿真中的关键应用
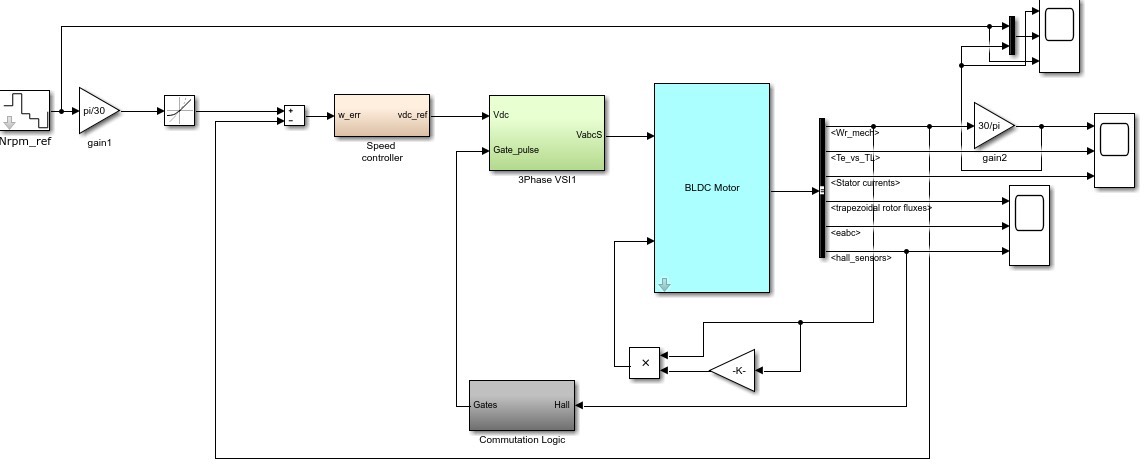
# 摘要
本文全面探讨了MATLAB在机电系统仿真中的应用,从基础理论到控制策略的设计与实现,再到未来发展方向。首先介绍了MATLAB在机电系统仿真中的基础理论和控制策略理论基础,包括控制系统的基本概念和数学模型。接着,详细阐述了在MATLAB中构建机电系统模型、仿真实现以及结果分析与优化的过程。此外,本文深入探讨了MATLAB控制策略在典型机电系统中的应用案例,并对自适应控
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )