




【实时操作系统优化】:在TLC6C5748-Q1上的实现与性能提升


TI-TLC6C5748-Q1.pdf
摘要
实时操作系统(RTOS)是现代嵌入式系统的核心,以其高响应速度和确定性保证了关键任务的及时完成。本文首先介绍了RTOS的基本原理与架构,重点分析了其性能指标,包括响应时间、CPU利用率和内存管理效率。随后,通过对特定硬件平台TLC6C5748-Q1的特性解析,探讨了RTOS在该平台上的支持和优化潜力。案例研究部分则展示了如何对TLC6C5748-Q1平台进行实时操作系统的性能优化,并评估优化结果与效益。最后,文章展望了RTOS优化的未来趋势,如物联网(IoT)与边缘计算的融合、人工智能(AI)的应用、系统安全性和可靠性提升以及持续集成与自动化测试框架的发展。
关键字
实时操作系统;性能指标;任务调度;内存管理;TLC6C5748-Q1;优化实践
参考资源链接:TI TLC6C5748-Q1:48通道汽车级PWM LED驱动器详解
1. 实时操作系统的基本原理与架构
实时操作系统(RTOS)与传统操作系统最大的不同在于其能够提供确定性的响应时间和保证任务在规定时间内完成。本章首先介绍实时操作系统的定义,然后详细解析RTOS的基本工作原理和关键架构组件。
实时操作系统的定义
实时操作系统是一种专为执行实时应用而设计的系统,能够保证在规定的时间内完成任务。它通常应用于对时间要求严格的嵌入式系统中,如自动化工厂控制、飞行控制系统等。
实时操作系统的架构组件
RTOS主要由以下几个关键组件构成:
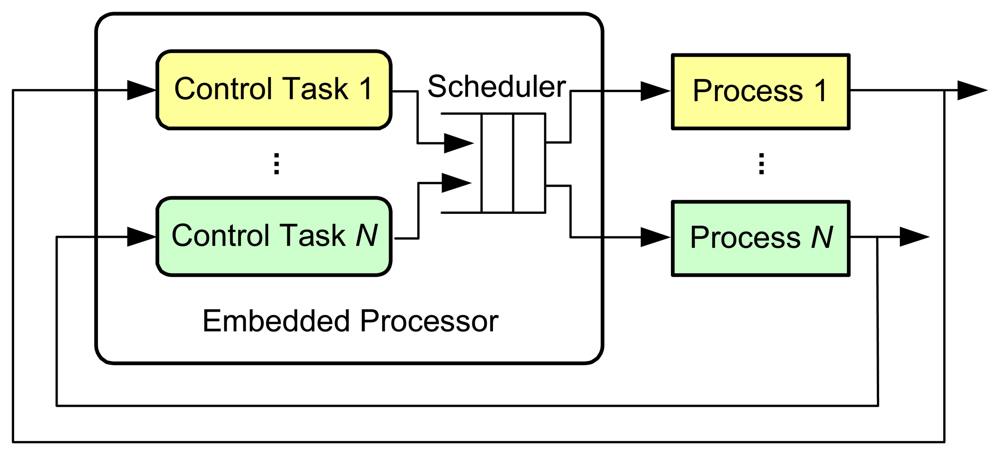
- 调度器(Scheduler):负责任务的管理和调度,确保按照优先级和时间约束来分配CPU资源。
- 中断管理器(Interrupt Handler):用于处理外部或内部的异步事件,保证对突发事件的快速响应。
- 内存管理器(Memory Manager):负责高效地分配和管理内存资源,通常使用静态分配机制以减少碎片化和提高效率。
实时性的衡量
实时操作系统的实时性通常通过响应时间和系统确定性来衡量。响应时间是指从任务开始请求到完成任务所需的时间,系统确定性则是指系统能重复地在规定时间内完成任务的能力。理解这些概念对于设计和优化RTOS至关重要。
2. 实时操作系统的性能指标分析
实时操作系统(RTOS)的设计初衷是为了满足特定应用对时间确定性和快速响应的要求。这类操作系统广泛应用于嵌入式系统中,例如汽车电子、工业控制和通信网络等。性能指标是衡量RTOS满足应用需求能力的关键因素,它们不仅关系到系统的基本功能,还涉及到系统的稳定性和用户体验。在本章中,我们将深入探讨RTOS的性能指标,包括响应时间和系统确定性的理论基础,以及关键性能指标的测量和优化。
2.1 响应时间和确定性的理论基础
2.1.1 响应时间的定义和重要性
响应时间是指从任务发出请求到系统给出响应所需的时间。在RTOS中,这是一个至关重要的指标,因为绝大多数的实时系统都要求任务能够在预定的时限内得到处理。在不同应用中,响应时间的阈值可能不同。例如,在汽车防抱死制动系统(ABS)中,响应时间要求必须在10毫秒之内,而在车载娱乐系统中,响应时间可以放宽到数十甚至数百毫秒。
响应时间由多个部分组成,包括任务切换时间、中断处理时间和任务执行时间。在实时系统中,通常使用最坏情况下的响应时间来评估系统性能,以确保系统在极端情况下仍然能够满足实时性要求。
2.1.2 系统确定性的评估方法
系统确定性是指系统按照预定的时间和顺序执行任务的能力。一个高确定性的RTOS能够减少任务执行的不确定因素,例如任务调度的延迟和中断响应的不确定性。评估系统确定性的方法包括分析任务调度算法、中断响应机制以及任务和资源管理策略。确定性评估的目的是找出系统中最坏情况下的性能瓶颈,然后采取措施进行优化。
为了量化系统的确定性,开发者常常使用确定性模型来预测和评估任务的执行情况。这些模型可以帮助开发者在设计阶段就发现潜在的问题,并在系统实施前进行调整。
2.2 实时操作系统的关键性能指标
2.2.1 CPU利用率的测量与优化
CPU利用率是指CPU处理任务所占用时间的百分比。在RTOS中,CPU利用率的测量和优化对于系统性能至关重要。高CPU利用率可能意味着系统资源得到了充分利用,但也可能导致任务响应时间延迟和系统过载。因此,合理的CPU利用率是实时系统设计时的优化目标之一。
测量CPU利用率通常涉及到监测CPU在执行任务期间的活动时间,并计算活动时间占总时间的比例。优化CPU利用率的方法包括:
- 调整任务优先级,确保高优先级的任务能够优先执行。
- 使用低占空比的任务来减少对CPU资源的需求。
- 实施有效的任务调度算法,例如时间片轮转或优先级调度。
- // 示例代码块:测量CPU利用率的伪代码
- void measureCpuUtilization() {
- // 初始化开始时间
- uint64 startTime = getCpuCycleCount();
- // 执行任务
- performTask();
- // 初始化结束时间
- uint64 endTime = getCpuCycleCount();
- // 计算任务执行时间
- uint64 executionTime = endTime - startTime;
- // 计算CPU利用率(示例值)
- double cpuUtilization = (executionTime / getTotalCpuCycles()) * 100;
- // 打印结果
- print("CPU Utilization: " + cpuUtilization + "%");
- }
2.2.2 内存管理效率的分析与改进
内存管理效率对于RTOS的性能有着直接影响,尤其在资源受限的嵌入式系统中。高效的内存管理可以减少内存碎片、提高内存利用率和减少内存访问延迟。
分析内存管理效率可以从以下几个方面入手:
- 内存碎片化程度:内存碎片是由于频繁的内存分配和释放造成的,可以通过内存池来减少碎片。
- 内存泄漏检测:内存泄漏会导致可用内存逐渐减少,需要周期性地检查内存分配和释放状态。
- 堆栈溢出检测:检查任务的堆栈使用情况,防止任务堆栈溢出导致系统崩溃。
改进内存管理效率通常需要选择合适的内存管理策略和工具。例如,在一些RTOS中,可以通过静态内存分配替代动态分配,减少内存管理的开销。
2.3 系统负载和多任务处理
2.3.1 多任务环境下的任务调度策略
多任务环境是RTOS的一个重要组成部分,任务调度策略决定了如何在多个任务之间分配CPU时间。任务调度策略可以分为静态和动态两大类。静态调度通常在系统设计阶段确定任务的执行顺序和时间,而动态调度则允许在运行时根据任务的优先级和系统状态调整任务的执行。
在设计任务调度策略时,需要考虑任务的截止时间、优先级、执行时间以及系统资源的可用性。常见的动态调度算法有轮转调度(Round-Robin)、优先级调度(Priority Scheduling)和最早截止时间优先(Earliest Deadline First,EDF)。
2.3.2 负载均衡技术的实现与应用
负载均衡技术旨在优化任务在多个处理器或处理单元之间的分配,以充分利用系统资源并避免某个处理器过载。在单处理器系统中,负载均衡主要体现在任务调度的公平性和效率上。而在多处理器系统中,负载均衡还涉及到任务在不同处理器间的迁移策略。
负载均衡的实现可以通过以下方法:
- 轮转调度:每个任务轮流在处理器间执行。
- 基于负载的调度:根据当前各处理器的负载情况,动态地将任务分配到负载较轻的处理器上。
- 基于预测的调度:预测任务的执行时间,将任务分配到预期负载较轻的处理器。
负载均衡技术的应用提高了系统的并行处理能力,有助于缩短任务的总体响应时间,提高系统的整体性能。
3. TLC6C5748-Q1平台特性解析
3.1 TLC6C5748-Q1硬件架构概览
3.1.1 核心处理器特性
TLC6C5748-Q1 是一款专为高性能实时应用设计的处理器。它集成了 ARM Cor

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
相关推荐

专栏目录
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【Lua脚本达人】:在OpenResty中打造完美脚本的秘籍
【容量管理秘籍】:高效分配三启动U盘空间的艺术
【校准流程详解】:精确度提升手册 - FLUKE_8845A_8846A校准步骤全解
【RAC环境下Oracle表空间管理】:高可用架构中ORA-01654应对术
LECP Server在工业自动化中的应用:20个案例与最佳实践分析
SVG动画调试秘籍:确保跨浏览器兼容性的10个测试技巧
【Matlab交互DXF数据全攻略】:DXFLib-v0.9.1.zip一步到位读取技巧
【异步编程指南】:高德地图API异步调用的高效实现
项目驱动的 ATF54143芯片选型秘籍:如何精确匹配需求
【深入RFID交互原理】:标签与读写器协作的优化艺术


专栏目录
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )





















