【构建高效视觉仿真环境】:ROBOGUIDE最佳实践秘籍
发布时间: 2025-01-09 02:24:04 阅读量: 7 订阅数: 10 

构建高效RESTful API:Golang最佳实践指南
# 摘要
视觉仿真环境作为一种先进的模拟技术,在工业自动化领域扮演着越来越重要的角色。本文首先介绍了视觉仿真环境的基本概念,随后详细阐述了ROBOGUIDE的安装、配置、仿真模型构建以及仿真运行与分析。特别地,本文探讨了如何导入和编辑机器人模型,设定工作环境,以及集成和校准视觉系统。进一步地,文章分析了仿真运行过程中的数据采集、分析和结果验证,并提供了优化仿真效果的方法。在高级应用方面,本文讨论了机器学习、虚拟现实与自动化测试与视觉仿真的结合。最后,通过实际工业应用案例和问题解决方案,本文为读者提供了理论与实践相结合的深入理解,并对未来技术发展趋势进行了展望。
# 关键字
视觉仿真;ROBOGUIDE;模型构建;数据采集分析;机器学习;虚拟现实;自动化测试;工业应用案例
参考资源链接:[ROBOGUIDE视觉仿真教程:实操步骤与设置详解](https://wenku.csdn.net/doc/6412b52abe7fbd1778d422b9?spm=1055.2635.3001.10343)
# 1. 视觉仿真环境的基本概念
## 1.1 视觉仿真环境的定义和重要性
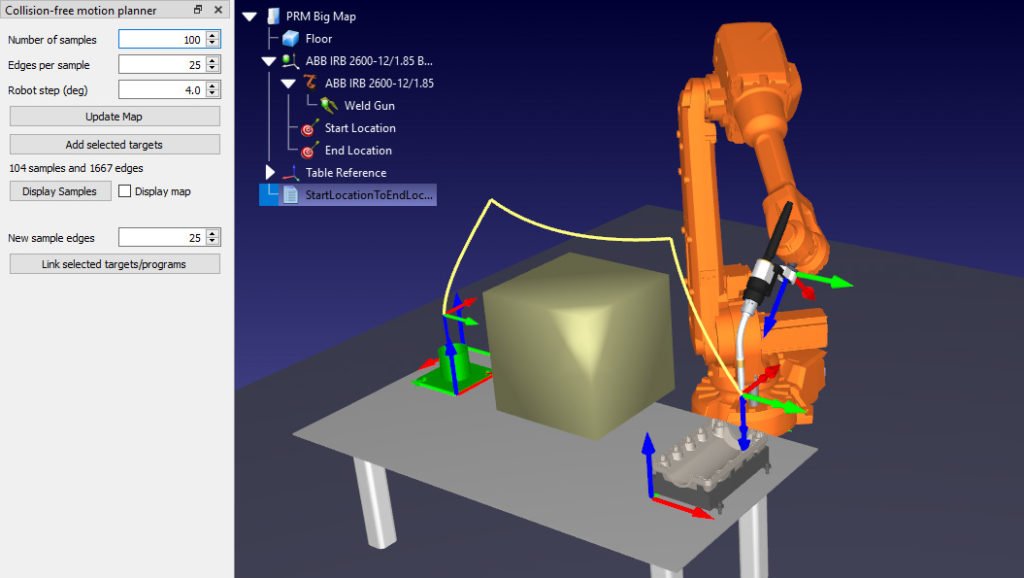
在进行视觉仿真环境的深入探讨之前,让我们先了解什么是视觉仿真环境。简单来说,视觉仿真环境是一种通过软件来模拟真实世界的工作环境,尤其是通过视觉系统来感知和处理信息。这种技术在工业领域,尤其是自动化和机器人学中有着广泛的应用。
视觉仿真环境的重要性在于,它允许我们在一个安全的虚拟环境中测试和优化我们的系统。这不仅可以节省成本,还可以提高效率和安全性。在没有任何实际风险的情况下,我们可以尝试各种不同的方案,寻找最佳的解决方案。
## 1.2 视觉仿真环境的技术要素
构建一个视觉仿真环境涉及到多个技术要素。首先,我们需要有一个三维模型来模拟真实世界的工作环境。其次,我们需要有一个视觉系统来模拟摄像头和其他视觉设备,以此来捕捉和处理图像数据。最后,我们还需要有一个算法来处理这些数据,进行物体识别,路径规划等任务。
## 1.3 视觉仿真环境的应用领域
视觉仿真环境的应用领域非常广泛。在工业领域,它可以用于自动化生产线的模拟和优化,机器人路径规划的模拟等。在教育领域,它可以用于教学和研究,让学生在一个虚拟的环境中学习和实践。在娱乐领域,它可以用于游戏和虚拟现实的开发。总的来说,视觉仿真环境是一种强大的工具,可以帮助我们在各个领域进行创新和改进。
# 2. ROBOGUIDE的安装和配置
## 2.1 ROBOGUIDE的系统要求
### 2.1.1 硬件配置
ROBOGUIDE是FANUC机器人的官方离线编程和仿真软件。为了运行ROBOGUIDE,必须确保你的计算机满足FANUC推荐的最小硬件配置要求。这是因为ROBOGUIDE利用了高级图形处理能力以及进行复杂仿真的处理能力,特别是在运行大规模的机器人工作单元模拟时。
一般来说,推荐的硬件配置包括:
- 至少一个Intel Core i7或相等级别的CPU
- 16GB或更高的RAM(建议32GB以获得最佳体验)
- 高性能显卡,支持DirectX 11或更高版本,例如NVIDIA Quadro或AMD Radeon Pro系列(确保驱动程序是最新的)
### 2.1.2 软件依赖
除了硬件外,ROBOGUIDE还需要特定的软件环境才能正常运行。这些依赖项包括:
- 支持的操作系统:Windows 10 或 Windows Server 2019
- .NET Framework 4.8 或更高版本
- Microsoft SQL Server Express Edition(随软件安装提供)
- 需要具有管理员权限的用户账户进行安装和配置
确保所有软件依赖项都已满足,可以避免安装过程中出现兼容性问题。
## 2.2 ROBOGUIDE的安装步骤
### 2.2.1 安装前的准备工作
在开始安装ROBOGUIDE之前,请执行以下准备工作:
- 使用具有管理员权限的用户账户登录到计算机。
- 关闭所有正在运行的程序,特别是那些可能与ROBOGUIDE冲突的,如防病毒软件或防火墙。
- 确保计算机连接到了互联网,因为安装程序可能需要下载额外的组件。
### 2.2.2 安装过程的详细步骤
ROBOGUIDE的安装通常遵循以下步骤:
1. 插入ROBOGUIDE安装介质或运行下载的安装程序。
2. 选择安装选项,并同意许可协议。
3. 等待安装向导运行,完成安装前的检查。
4. 按照安装向导的提示,选择安装路径和配置安装选项。
5. 点击安装,等待安装程序完成。
安装过程中,确保遵循向导的指引,任何错误都可能会导致安装失败。
### 2.2.3 安装后的验证
安装完成后,验证ROBOGUIDE是否正确安装和配置至关重要。进行验证的步骤包括:
1. 打开ROBOGUIDE,查看启动屏幕。
2. 创建一个简单的仿真项目,以测试软件的基本功能。
3. 尝试模拟操作,确保软件响应正常。
如果在验证过程中遇到任何问题,请参考ROBOGUIDE的用户手册或联系FANUC的技术支持。
## 2.3 ROBOGUIDE的配置指南
### 2.3.1 系统参数设置
ROBOGUIDE允许用户自定义各种系统参数以适应特定的仿真需求。例如,你可以设置机器人的速度、加速度、以及工作对象的属性等。以下是配置系统参数的一般步骤:
1. 打开ROBOGUIDE软件。
2. 进入“系统参数”或类似命名的选项卡或菜单。
3. 根据需要设置各项参数,注意保持参数设置的合理性和实际可行性。
4. 应用设置并测试更改对仿真的影响。
### 2.3.2 网络和安全性配置
为了确保仿真环境的安全性,用户需要对ROBOGUIDE进行网络和安全性配置。此部分可能包括设置访问权限、网络安全策略等。配置步骤可能如下:
1. 确定网络环境配置,例如是否需要连接到局域网或互联网。
2. 在软件内设置网络安全选项,包括用户认证和权限管理。
3. 依据公司安全政策配置其他安全性设置,比如加密、日志记录等。
### 2.3.3 用户界面自定义
为了提高工作效率,ROBOGUIDE允许用户对界面进行自定义设置。这可能包括调整窗口布局、工具栏选项、快捷键等。以下是自定义用户界面的步骤:
1. 打开软件并进入用户界面自定义选项。
2. 根据个人习惯或工作流程调整布局和工具栏。
3. 创建并保存自定义的用户配置文件。
自定义用户界面可以帮助用户快速访问常用功能,并提高整体工作效率。
通过遵循上述步骤和指南,用户可以确保ROBOGUIDE软件已正确安装并配置,从而在接下来的章节中顺利进行仿真模型构建和仿真运行。
# 3. ROBOGUIDE的仿真模型构建
## 3.1 机器人模型的导入和编辑
在构建一个精准的仿真模型时,机器人模型的导入和编辑是至关重要的。准确的模型可以大大提高仿真的可靠性,并能够更好地预测实际应用中的行为和表现。
### 3.1.1 导入3D模型
首先,我们需要导入机器人本体的3D模型到ROBOGUIDE中。3D模型是构成仿真环境的基础,可以通过以下步骤导入:
1. **准备3D模型文件**:确保拥有机器人的3D模型文件,通常是`.stl`或`.iges`格式。这些文件可以是CAD软件创建的,也可以从专业的3D模型库中获取。
2. **打开ROBOGUIDE**:启动软件并打开一个新项目。
3. **导入模型**:通过软件界面中的导入选项,选择相应的文件路径,然后导入3D模型到仿真环境中。
```mermaid
graph LR
A[启
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
ROBOGUIDE视觉仿真专栏提供全面的指南,涵盖从初学者到专家的各个阶段。它深入探讨了视觉仿真的高级功能和定制开发,并展示了在工业自动化中的实际应用案例。专栏还介绍了光线追踪技术、最佳实践和图像处理技术,以提高仿真准确性和效率。此外,它还提供了复杂场景下的应对策略、后处理技巧和软件集成指南,以及传感器模拟的深入解析。通过这些实用技巧和权威指导,ROBOGUIDE视觉仿真专栏旨在帮助用户掌握视觉仿真技术,优化生产线并提高自动化效率。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
COMSOL深度剖析:圆柱极坐标在物理场分析中的秘密武器

# 摘要
COMSOL Multiphysics是一个强大的多物理场仿真软件,它提供了一系列数值方法和工具来模拟现实世界的物理过程。本文介绍了COMSOL Multiphysics的基本功能,特别是在圆柱极坐标下的应用。圆柱极坐标因其在数学表达和物理场建模中的优势,在工程设计和科学研究中被广泛应用。文章详细探讨了圆柱极坐标的基础理论,以及
CAA高级技巧揭秘:实现CAA3D标注中的复杂交互

# 摘要
CAA3D标注技术是高级计算机辅助设计(CAA)领域中的一个重要分支,它结合了三维标注的理论与实践,为用户提供精确的标注工具和环境。本文首先介绍了CAA3D标注的基础知识,包括其定义、功能、应用场景以及安装配置等。随后,深入探讨了CAA3D标注的理论基础、实践应用、复杂交互实现、性能优化和问
EDP转接技术全面揭秘:专家带你深度理解显示系统中的转接芯片

# 摘要
EDP(Embedded DisplayPort)转接技术是连接显示设备与信号源的重要手段,涵盖了芯片原理、硬件构成以及软件支持等多方面内容。本文首先介绍EDP转接技术的基本概念,随后详细阐述了转接芯片的工作原理、硬件组成和软件支持,分析了其在不同显示系统中的应用,并通过实践案例探讨了技术实施的流程、遇到的挑战及解决方案。最后,本文展望了EDP转接技术的发展
RIP协议路径优化:专家级路由选择策略

# 摘要
RIP协议是一种经典的内部网关协议,广泛应用于网络路由选择和路径优化。本文首先介绍RIP协议的基本概念、路径选择原则和工作机制,包括数据包格式、信息更新和距离向量算法等。随后,文章深入探讨了RIP协议的定时机制以及路径优化策略,如路由抑制、水平分
Ubuntu 18.04.5下载与安装指南:官方vs镜像源,你选哪个?

# 摘要
本文详细介绍了Ubuntu 18.04.5的操作系统,从概述与官方下载步骤到使用镜像源的优势与方法,再到安装前的准备工作和安装流程,最
【C#文件上传错误处理手册】:异常管理与故障排除的专家级指南
# 摘要
C#作为一种流行的编程语言,其文件上传功能在开发中扮演着重要角色。本文旨在为C#开发者提供一个全面的文件上传指南,涵盖基础知识、异常类型解析、错误处理实践、故障排除以及高级功能实现等多个方面。文章首先介绍了文件上传的基础知识,然后详细分析了文件上传过程中可能遇到的各类异常,并探讨了如何通过理论基础和实践技巧来有效管理这些异常。此外,本文还介绍了文件上传的故障排除步骤和技巧,以及如何实现文件上传进度监控和安全性增强。最后,文章提出了文件上传性能优化的策略,并讨论了如何实现高效的文件处理方法。通过对这些高级功能的掌握,开发者能够提升用户体验,并增强应用程序的性能和安全性。
# 关键字
数控编程新手必读:宇龙V4.8仿真软件的5大入门技巧

# 摘要
本文系统介绍了宇龙V4.8数控编程仿真软件的基本界面、操作流程、编程技巧、仿真操作分析以及高级功能。通过阐述软件的功能布局、参数配置、G代码和M代码的基础知识,本文旨在帮助用户掌握宇龙V4.8的基础应用。进一步地,本文探索了宇龙V4.8的高级功能,如宏程序、子程序的使用和多轴加工编程,并通过实际案例分
单片机应用开发入门指南:新手必备的7大技巧
# 摘要
本论文主要介绍了单片机应用开发的基础知识、高级技巧以及实际项目案例分析。首先对单片机应用开发进行了简要概述,然后详细讨论了开发环境和工具的搭建过程,包括开发平台的选择、编程语言和编译器的使用,以及调试工具和方法的应用。接下来,论文深入探讨了基础编程技巧与实践,如单片机编程基础、I/O端口控制以及中断和定时器的使用。此外,论文还探索了高级开发技巧,如外围设备接口技术、实时操作系统(RTOS)的集成和能效管
Nginx初学者秘籍:9步轻松从安装到运行首个Web服务器

# 摘要
Nginx作为一种高性能的HTTP和反向代理服务器,广泛应用于现代网络架构中。本文从Nginx的基本安装、配置管理入手,详细介绍了Nginx配置文件的结构和常用的配置指令,以及如何控制其运行和进行性能优化。在此基础上,文章进一步探讨了Nginx在静态资源服务、反向代理和负载均衡方面的应用,并提供了具体配置示例。特别地,本文还深入分析了
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )