资源管理革新:强化学习在智能调度与优化中的应用
发布时间: 2024-09-03 10:55:51 阅读量: 150 订阅数: 82 
# 1. 强化学习简介及其在资源管理中的潜力
## 1.1 强化学习的基础知识
强化学习(Reinforcement Learning, RL)是一种机器学习范式,旨在通过与环境交互来学习如何在特定任务中表现得更好。与传统的监督学习不同,强化学习的智能体(Agent)在探索未知环境时,依据获得的奖励(Reward)来调整其行为策略(Policy),目的是最大化长期累积奖励。
## 1.2 强化学习的潜力
在资源管理领域,强化学习的潜力巨大。资源管理常常需要在多变的环境中做出快速决策,比如数据中心的虚拟机调度、智能电网的电力分配等。传统的方法往往依赖固定的规则和预定义的策略,而强化学习能够自主学习环境的变化规律,自动调整管理策略,以达到资源利用效率的最优化。
## 1.3 实际应用展望
通过分析强化学习算法在资源管理中的应用实例,我们可以看到其在自动化决策、优化资源使用效率等方面具有巨大潜力。随着算法的不断演进和优化,未来强化学习在智能调度、物流、制造等行业中的应用将更加广泛,为行业带来深刻变革。
# 2. 强化学习基础理论
### 2.1 强化学习的核心概念
#### 2.1.1 智能体、环境与状态
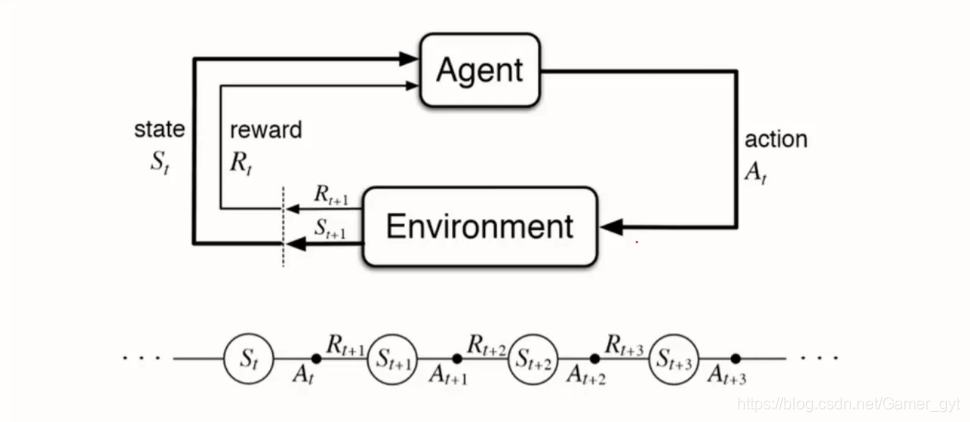
在强化学习的架构中,智能体(Agent)是系统的决策者,其通过与环境(Environment)的交互来学习。环境可以是实际的物理世界,也可以是模拟的抽象环境,如电子游戏。智能体在环境中感知环境状态(State),根据当前状态采取行动(Action),并从环境中获得反馈,即奖励(Reward)。
智能体的行动会导致环境状态的改变。状态转移函数定义了从一个状态到另一个状态的转换概率。智能体的目标是最大化在长时间跨度内接收到的总奖励。这一目标的实现,需要智能体学习策略(Policy),即从状态到行动的映射规则,以选择最有可能带来最大未来奖励的行动。
```python
# 示例:定义一个简单环境的状态空间和动作空间
states = ['state1', 'state2', 'state3']
actions = ['action1', 'action2', 'action3']
# 状态转移概率示例
transition_matrix = {
'state1': {'action1': 'state2', 'action2': 'state3', 'action3': 'state1'},
'state2': {'action1': 'state3', 'action2': 'state1', 'action3': 'state2'},
'state3': {'action1': 'state1', 'action2': 'state2', 'action3': 'state3'}
}
```
#### 2.1.2 奖励函数与策略
奖励函数是强化学习中的关键组件之一,它定义了智能体在每个时间步获取的即时奖励。奖励通常是一个标量值,其正负和大小代表了采取特定行动的好坏和重要性。智能体的最终目标是最大化累积奖励,即在长期操作中获得尽可能多的奖励。
策略是智能体如何行动的规则。它定义了在每个状态下应该选择哪个行动。策略可以是确定性的,也可以是随机性的。确定性策略为给定状态下提供一个确定的行动,而随机性策略为给定状态提供行动的概率分布。
```python
# 简单奖励函数示例,根据状态和动作返回奖励值
def reward(state, action):
if action == 'action1':
return 1 if state == 'state1' else -1
elif action == 'action2':
return 5 if state == 'state2' else -5
else:
return 0
# 示例策略函数,根据状态返回行动的概率分布
def policy(state):
return {
'action1': 0.1,
'action2': 0.6,
'action3': 0.3
}
```
### 2.2 强化学习的关键算法
#### 2.2.1 Q-Learning与SARSA
Q-Learning是一种基于值的强化学习算法,用于学习最优策略。它通过不断更新动作价值函数Q(s,a),即在状态s下采取动作a的预期奖励来学习。Q值通过贝尔曼方程递归定义,其更新规则如下:
Q(s,a) ← Q(s,a) + α * (r + γ * max(Q(s',a')) - Q(s,a))
其中,α是学习率,r是即时奖励,γ是折扣因子,s'是新的状态,a'是根据当前策略选择的最佳动作。
SARSA是一种基于策略的强化学习算法。与Q-Learning不同,SARSA在更新Q值时使用的是其当前的策略而非最大的Q值来选择下一个动作。因此,SARSA是一个在线算法,它在探索中学习。
```python
# Q-Learning算法伪代码示例
alpha = 0.1 # 学习率
gamma = 0.9 # 折扣因子
epsilon = 0.1 # 探索概率
# 初始化Q值表
Q = defaultdict(lambda: defaultdict(lambda: 0))
for episode in range(1000):
state = env.reset()
action = choose_action(state, Q, epsilon)
done = False
while not done:
next_state, reward, done = env.step(action)
next_action = choose_action(next_state, Q, epsilon)
# Q值更新规则
Q[state][action] += alpha * (reward + gamma * Q[next_state][next_action] - Q[state][action])
state = next_state
action = next_action
```
#### 2.2.2 策略梯度与Actor-Critic方法
策略梯度方法通过直接优化策略来学习。策略被参数化为一个可以微分的概率分布,通过梯度上升来增加好的行动的概率,降低坏的行动的概率。Actor-Critic方法是策略梯度的一种,其中“Actor”决定动作,“Critic”评估动作。Actor更新策略,而Critic更新价值函数。
```python
# Actor-Critic算法伪代码示例
for episode in range(1000):
state = env.reset()
done = False
while not done:
action_prob = policy(state) # Actor部分
action = np.random.choice(actions, p=action_prob)
next_state, reward, done = env.step(action)
# Critic更新价值函数
delta = reward - value(state)
value(state) += alpha_value * delta
# Actor更新策略
actor_loss = -np.log(action_prob[action]) * delta
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨强化学习算法在各个领域的应用场景,涵盖资源管理、医疗健康、工业自动化、供应链管理等方面。通过一系列文章,专栏阐述了强化学习在智能调度、疾病诊断、生产优化、响应速度提升和成本降低等方面的作用。同时,专栏还提供了从基础模型到高级技巧的全面指南,以及构建逼真模拟环境的关键技术,帮助读者深入了解强化学习算法的应用和优化方法。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【CATIA V5复合材料设计终极指南】:从入门到专业设计的全攻略
# 摘要
CATIA V5作为一种先进的三维设计软件,在复合材料设计领域中扮演着重要角色。本文详细介绍了CATIA V5在复合材料设计中的应用,从基础知识、设计工具与环境、建模与分析到仿真与测试等方面进行了全面的探讨。通过对复合材料的分类、特性分析以及设计流程优化技巧的阐述,本文旨在提供给读者一个关于如何有效利用CATIA V5进行复合材料设计的实践指南。本文还通过案例研究,展示了复合材料在不同行业,如航空航天和汽车制造中的实际应用,并讨论了仿真技术在产品开发中的重要作用。关键字
# 关键字
复合材料设计;CATIA V5;机械性能分析;设计流程优化;结构分析与优化;仿真模拟
参考资源链接:
技术债务不再是问题:中控BS架构考勤系统的代码健康维护策略

# 摘要
本文全面探讨了中控BS架构考勤系统的设计、维护策略和性能优化。文章首先概述了中控BS架构的定义、优势以及技术债务的形成与影响,强调了代码健康维护的重要性。随后,深入讨论了代码健康维护的理论框架,包括策略设计原则、设计模式与重构方法,以及自动化测试和持续集成的实施。接着,通过实际案例分析,探讨了代码重构实践、测试驱动开发(TDD)的实施和持续部署(CD)与代码质量保证的策
程序员认证考点:字符串处理函数的编写技巧
# 摘要
字符串处理作为编程中不可或缺的技能,对软件开发的各个方面都有深远影响。本文从字符串处理的基本理论讲起,详细介绍了字符串创建与销毁、查找与替换、分割与连接等基础操作,强调了正确内存管理的重要性。进一步,本文探讨了使用正则表达式、处理Unicode及多字节字符集,以及字符串的国际化和本地化等高级技术。性能优化部分着重于算法选择、内存管理和编译器优化,以提高字符串处理的效率
光传输安全新防线:保护ODU flex-G.7044免受网络攻击
# 摘要
随着光传输技术的不断发展,网络安全问题日益突出,ODU flex-G.7044作为一种先进的传输技术,其安全性和可靠性成为关注焦点。本文首先介绍了光传输与网络安全的基础知识,然后深入探讨ODU flex-G.7044技术的工作原理及其技术优势和应用场景。第三章分析了针对ODU flex-G.7044的网络攻击手段及其带来的风险,接着在第四章提出
JY01A直流无刷IC全攻略:深入理解与高效应用

# 摘要
本文详细介绍了JY01A直流无刷IC的设计、功能和应用。文章首先概述了直流无刷电机的工作原理及其关键参数,随后探讨了JY01A IC的功能特点以及与电机集成的应用。在实践操作方面,本文讲解了JY01A IC的硬件连接、编程控制,并通过具体
无线定位算法安全防护指南:防范定位数据泄露的有效措施

# 摘要
无线定位技术在提供便捷服务的同时,也带来了严重的安全风险,尤其是定位数据的泄露问题。本文首先概述了无线定位技术及其潜在的安全风险,然后深入分析了定位数据泄露的途径与影响,包括信号截获、网络攻击
【跨领域视角】:探索S参数转换表在各行各业的应用
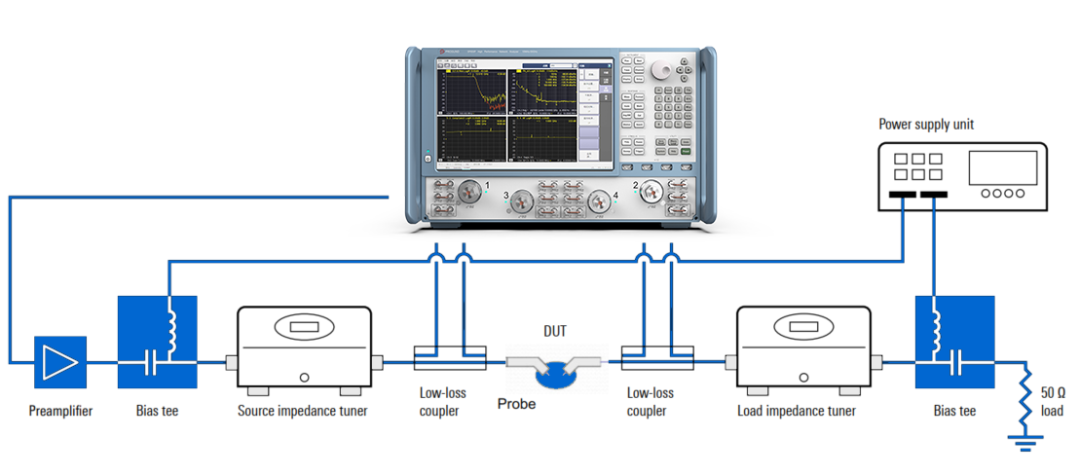
# 摘要
S参数转换表是现代电信、计算机科学及制造业中不可或缺的技术工具。本文首先介绍了S参数转换表的基础概念及其在射频系统中的作用,并详述了它在信号完整性分析、材料测试、机械设计和质量控制中的广泛应用。然后,探讨了S参数转换表在计算机科学领域中的应用,包括高速网络通信、计算机硬件设计和软件开发。最后,本文展望了S参数转换表在新
【TongWeb7事务管理与数据一致性】:业务数据安全的保障

# 摘要
TongWeb7事务管理是确保企业级应用数据一致性和完整性的关键组成部分。本文首先介绍了事务管理的基础理论,包括事务的ACID属性、数据一致性的理论支持和隔离级别的分类。接着,探讨了TongWeb7在事务管理实践方面的高级特性和性能优化策略,如嵌套和分布式事务、事务日志及恢复机制。文章还深入分析了数据一致性在TongWeb7中的实现细节,包括锁机制、死锁预防和事务日志的管理。最后,针对业务数据安全进阶话题,本文讨论
【优化案例研究】:从问题到解决方案,PID控制系统的升级之旅
# 摘要
本文对PID控制系统进行了全面概述,深入解析了PID控制理论,包括控制器原理、数学模型构建以及参数意义。文章还探讨了PID控制器参数调节的经典方法、优化技术及自动调整策略。针对控制系统中常见的超调、稳定性问题以及噪声干扰,本文提供了理论分析和改进方法。对于非线性和复
【老旧系统升级】:如何为传统Delphi系统添加现代进度反馈
# 摘要
随着信息技术的快速发展,老旧系统的升级已成为维持企业竞争力的关键步骤。本文探讨了老旧Delphi系统升级的需求与挑战,回顾了Delphi的基础知识,强调了现代进度反馈机制的重要性,并提供了现代化改造的实践案例。文章详细讨论了老旧Delphi系统功能重构、进度反馈机制的集成,以及系统测试与优化的方法。最后
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )